1、下载投影处理代码
代码链接:https://github.com/jhzhang19/ros_project_pc_to_image

2、将其解压到ros工作空间catkin_ws/src中
(如果不知道如何创建ros工作空间可以参考我的另一篇博客,里面有记录如何创建ros工作空间
博客链接:https://blog.csdn.net/qq_49959714/article/details/127028396?spm=1001.2014.3001.5502
)
由于该代码开发者创建多了一个子目录,所以我们需要去除掉多余的子目录,即把ros_project_pc_to_image目录下的ros_detection_tracking文件夹复制到src目录下,然后将ros_project_pc_to_image删除掉。
(也可以通过命令 git clone 代码链接 的方式将代码克隆到src目录下)
3、编译

roscore
再打开一个新的终端,输入以下命令
cd ~/catkin_ws //进入到ros工作空间目录下
catkin_make //编译
source devel/setup.bash
rosrun ros_detection_tracking projector
4、播放rosbag(这里使用kitti数据集中的rosbag进行测试,也可以使用别的rosbag,但是需要修改相应的参数)
rosbag下载链接:
链接:https://pan.baidu.com/s/1vpBCDgHcRzllvDxi7lpRug
提取码:m1ji
进入rosbag存放目录并播放rosbag
cd xx播放rosbag
rosbag play -l example_new.bag //-l为循环播放
5、打开Rviz将投影的效果显示出来
在新的终端输入rosrun rviz rviz 即可打开rviz
rosrun rviz rviz点击rviz中的Panels,然后勾选上display
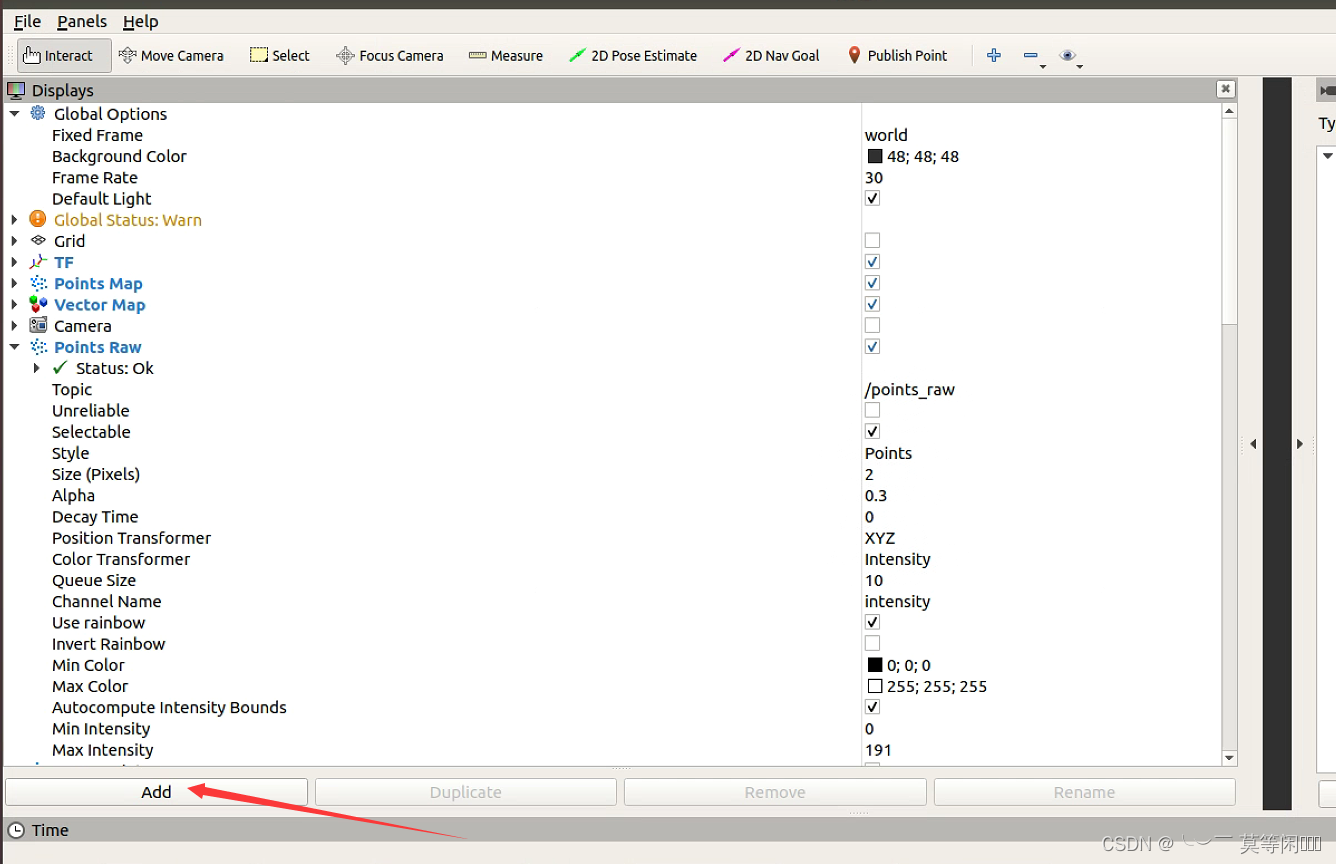
在Displays窗口中点击下面的Add
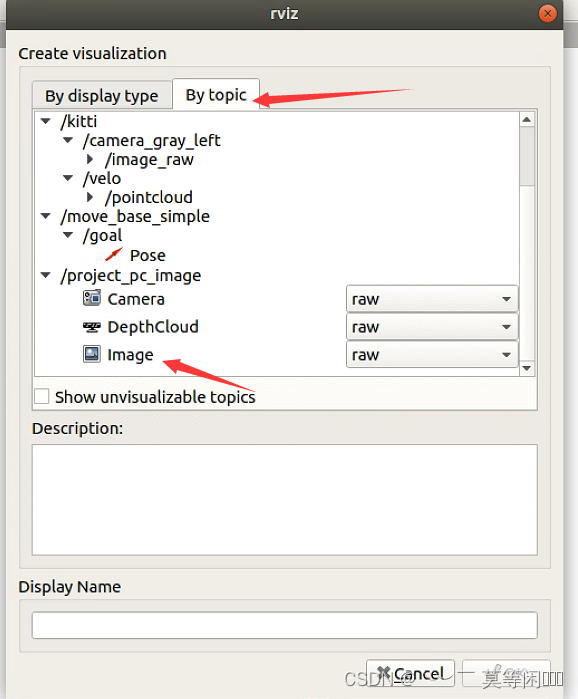
在弹出的窗口中选择/project_pc_image下的Image主题
最后可以看到以下效果:
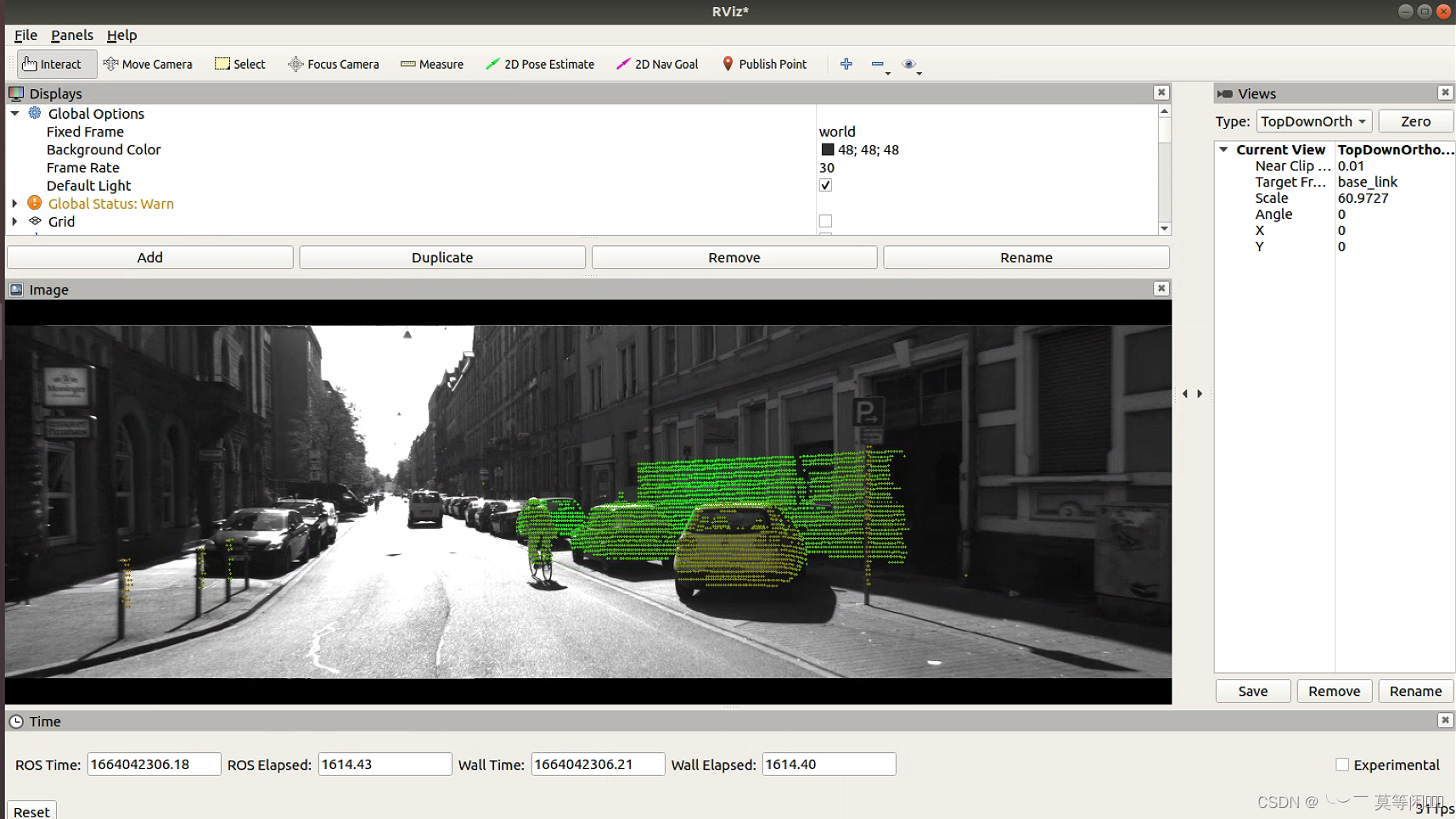
kitti点云投影到图像平面
参考博客: