一、传输速率与距离
CAN——Control Area Network 的缩写,小范围实时通信网络,通信距离与速率成反比。如下图所示,横轴为通信距离,竖轴为通信速率,距离越远,速率越低。

注:当通信距离太长时可以使用CAN 网关或网桥等设备划分子网,使子网通信速率与距离在规定范围内。
下表是关于通信速率、总线长度与支线长度的关系,表中数值为CiA组织的建议值。这些推荐值能够保证通信的稳定性和可靠性。
二、终端电阻与连接器
根据电磁场和微波理论,高频电路中负载阻抗需与传输线的特性阻抗一致,否则电信号在线束终端遭遇阻抗突变,发生反射现象,造成波形震荡。反射信号叠加到原信号上,会改变原波形的形状。极有可能出现总线错误:将显性读成隐性,或隐性读成显性。
我们都知道光从空气进入水中的时候光的线路会发生变化,那是因为光从一种介质进入另一种介质时,光会发生反射,从而改变了原来的光路。同理,由于电信号在阻抗不连续、阻抗不匹配的线路中传播会导致信号的反射,就会产生信号串扰、消息丢失、总线紊乱这一系列的问题。
那么信号反射这个问题该如何解决呢?
终端电阻可以用于减少通信线路上的反射,避免引起电平变化而导致数据的传输错误。
高速CAN与低速CAN终端电阻接法不同。高速CAN终端电阻接在线缆终端,可以保证特性阻抗连续;低速CAN分别接在两条线上。

CAN总线的终端电阻仅限于下表中规定的范围( ISO11898-2 )。
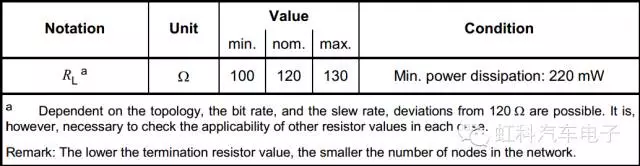
注:在汽车电子领域,一般都是用120欧姆的终端电阻。但是在工业自动化等其它应用领域,如果通信距离过长,为了保证CAN电平的最小幅值,需要匹配更大的终端电阻。
选作CAN总线的电缆必须达到下面给出的规格( ISO11898-2 ),这些规格主要用于标准化电气特性,并不涉及机械或材料方面的参数。

用于将ECU连入CAN总线的连接器必须符合下表中所规定(ISO11898-2)的要求,本规范的这个部分旨在标准化那些最重要的电气参数,并不涉及机械或材料方面的参数。

三、CAN总线拓扑结构
下图是高速CAN总线的拓扑结构,总线长度、支线长度和节点距离可以参考下图和表格。


下图是低速CAN总线的拓扑结构。

四、CAN分类
先理解CAN的物理层和数据链路层
物理层是指微控制器与 CAN 总线连接的驱动电路。物理层的三个子层:信令子层功能通常由集成 CAN 控制器的高级微控制器实现;介质附件子层功能由各芯片制造商提供的 CAN 收发器实现;介质从属接口子层规定了 CAN 总线相应连接器和电缆的特性。
数据链路层属于 CAN 的核心部分,它又可以进一步划分成两个子层:一个子层负责报文过滤、过载管理和管理恢复等功能;另一个子层负责数据的打包和解包、物理地址编码寻址、媒介访问管理、数据错误管理等功能。
常用的CAN总线分为:单线CAN、低速容错CAN、高速CAN。
高速CAN
根据线缆的长度提供从40Kbit/s到1Mbit/s的波特率。这是物理层最流行的标准,这是因为它允许设备间简单的线缆连接。DeviceNet以及CANopen规范就是使用了这种物理标准。高速CAN网络在每个网络端点端接一个120欧姆的电阻。
低速/容错CAN
提供从40 Kbit/s到125 Kbits/s的波特率。该标准允许在CAN总线连线失败时CAN总线通信得以继续进行。在低速/容错CAN网络,每种设备都有它自己的终端。
注意: 由于终端的类型不同,因此高速和低速/容错CAN设备不能在同一个网络中使用

在讨论它们的区别之前先明确以下几点:
1、讨论它们是A类、B类还是C类总线并没有多大意义,因为高速CAN同样可以使用低速CAN的波特率(单线CAN的波特率一般为33.3KHz),而且在实际应用中也不会有问题。但低速CAN使用高速CAN的波特率就会出现问题,这个问题不是纯粹由波特率引起的,而是由收发器引起的,因为在电平转换效率方面,低速CAN的收发器明显比高速CAN的收发器低。
2、它们的位传输时序、位仲裁、错误、校验、帧结构等等(即所谓的数据链路层)是没有区别的。至于数据链路层以上的诸如传送层、网络层、会话层、应用层等的协议,都是人为规定的,也不足以成为它们的区别。
3、这三种总线的区别主要在物理层面上。而以传输介质和线的数量来论——单线CAN只有一条导线,低速容错CAN和高速CAN通过双绞线传输——这点显而易见,不足为奇。
4、因此这三种总线的主要区别在于电平逻辑
这个区别可以从以下几种情况来说明:空闲时、有效时、睡眠时、唤醒时。这里假设收发器的电源为标准的5V和12V。
空闲时(即通常说的隐性位)

有效时(即通常说的显性位)

睡眠时

唤醒时

CAN总线的这些物理特性直接反映在收发器上。无论是哪种CAN总线,经过收发器后与微控制器的接口(TXD和RXD引脚)都是一样的,这时的电平逻辑也会变得一致。现在有很多单片机内部集成了CAN模块,还有各种收发器可以方便的转换,CAN总线的应用更多地变成了上层协议的事情,已经越来越少人真正关注总线底层的问题,也很少人愿意从事总线方面的基础性的研究了。
CAN FD
CAN FD 标准将CAN报文的数据段可提升到更高的位速度,其中可提升通信速率的数据段包含两个控制位、数据长度位,数据位以及CRC校验位。CAN FD报文通信时,在仲裁段和紧接着的数据控制段都是使用标准的通信波特率,当来到数据段时,CAN FD总线的通信波特率就会切换到更高的通信波特率。此时在CAN总线上只有一个CAN节点传输,其他节点进入监听模式。当这个数据段传送完毕后,通信波特率又重新切换到标准模式下。CAN FD通信时经常会使用到两种通信波特率,因此对新标准"FD"赋予的解释为:灵活的数据速率(“Flexible Data rate”)
另一方面CAN FD还有一个新的功能就是减少控制位的开销。对比目前CAN2.0标准最大8个字节的数据,CAN FD数据位最大的字节数提高至64位,CAN FD具有更高的有效传输负载。例如,CAN FD总线以2Mbit/s的速率、64位数据与CAN 250Kbit/s、8位数据传输对比,很明显在相同时间下,CAN FD的有效传输负载是CAN传输负载的8倍。CAN FD标准向下兼容CAN2.0A/B标准,CAN FD节点可以与现存的CAN2.0协议的节点进行通信,当然在这种情况下不能够使用CAN FD帧。这种兼容性为了CAN2.0设备能够平滑地过渡到CAN FD功能的硬件上。
如果你想了解更多可以关注公众号(FieldBus-Hongke)