SOF - Start of Frame, 帧起始,1bit。
RTR - Remote Tranmission Request BIT, 全称为远程发送请求位;在数据帧里必须为显性0 ,在远程帧里为隐性1
IDE - Identifier Extension Bit,全称识别符扩展位
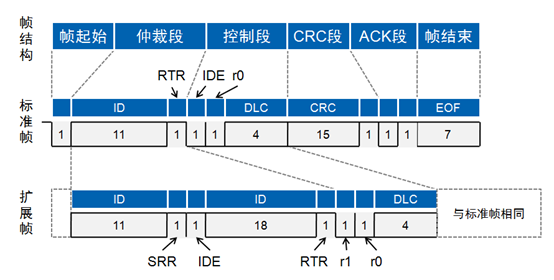
CAN 的报文格式有两种,不同之处其实就是识别符长度不同,具有11 位识别符的帧称为标准帧,而还有29 位识别符的帧为扩展帧。
当 CAN 总线上的一个节点(站)发送数据时,它以报文的形式广播给网络中所有节点,对每个节点来说,无论数据是否是发给自己的,都对其接收(可以通过硬件或者软件过滤不关心的报文)。
每组报文开头的11 位字符为标识符,定义了报文的优先级,这种报文格式成为面向内容的编制方案。同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文,当几个站同时竞争总线读取时,这种配置十分重要。
1、简介
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是一种能够实现分布式实时控制的串行通信网络。
优点:
传输速度最高到1Mbps,通信距离最远到10km,无损位仲裁机制,多主结构。近些年来,CAN控制器价格越来越低。
Ø 低成本:ECUs通过单个CAN接口进行通信,布线成本低。
Ø 高集成:CAN总线系统允许在所有ECUs上进行集中错误诊断和配置。
Ø 可靠性:该系统对子系统的故障和电磁干扰具有很强的鲁棒性,是汽车控制系统的理想选择。
Ø 高效率:可以通过id对消息进行优先级排序,以便最高优先级的id不被中断。
Ø 灵活性:每个ECU包含一个用于CAN总线收发芯片,随意添加CAN总线节点。
2、CAN总线网络
CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。为什么是120Ω,因为电缆的特性阻抗为120Ω,为了模拟无限远的传输线。
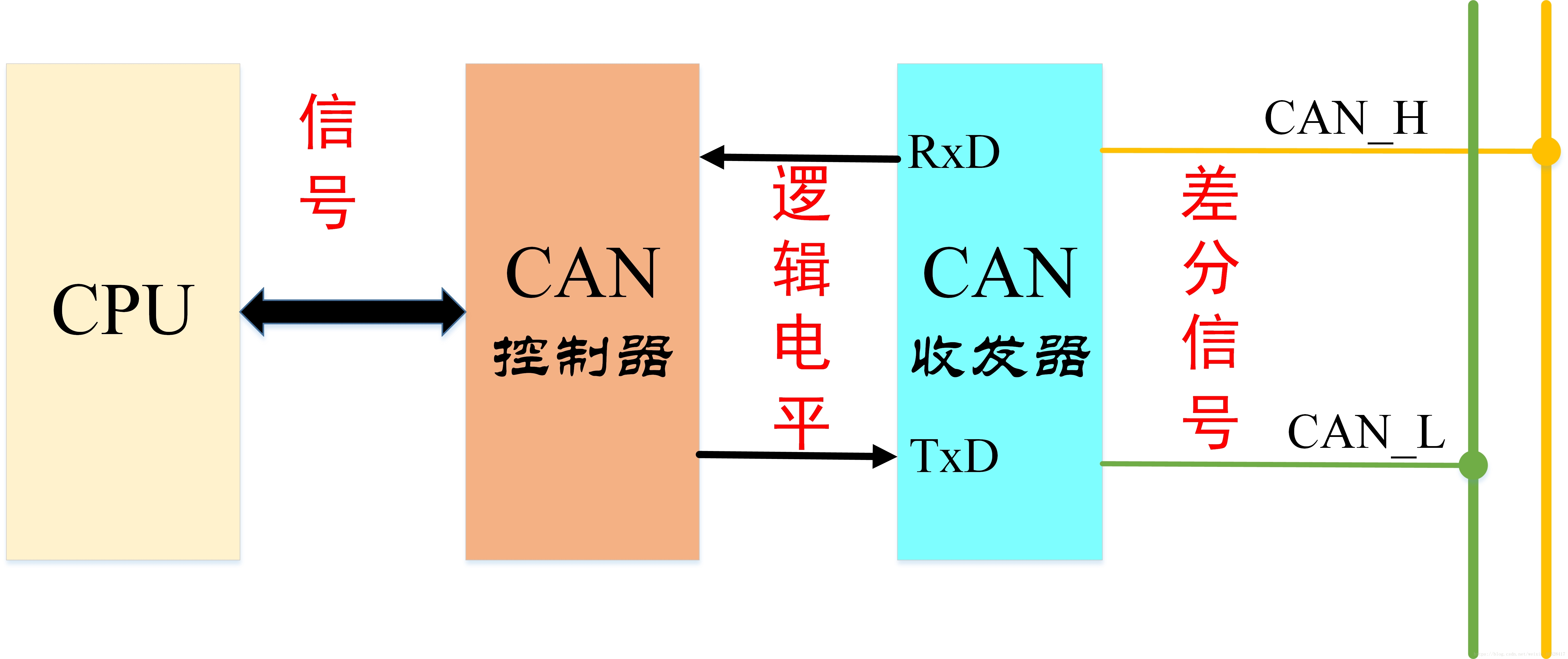
3、CAN收发器
CAN收发器的作用是负责逻辑电平和信号电平之间的转换。
即从CAN控制芯片输出逻辑电平到CAN收发器,然后经过CAN收发器内部转换将逻辑电平转换为差分信号输出到CAN总线上,CAN总线上的节点都可以决定自己是否需要总线上的数据。具体的引脚定义如下:
4、CAN信号表示
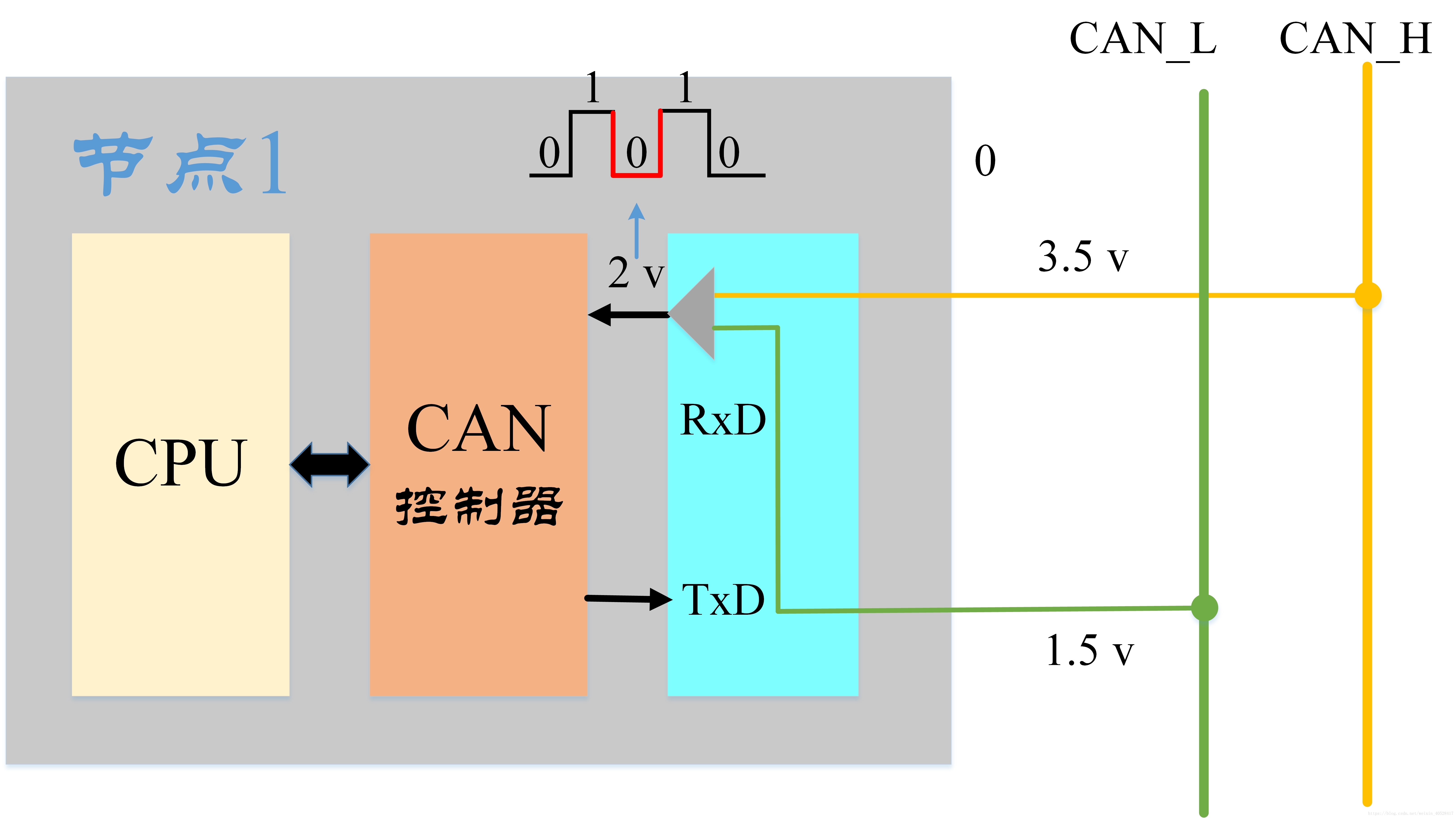
CAN总线采用不归零码位填充技术,也就是说CAN总线上的信号有两种不同的信号状态,分别是显性的(Dominant)逻辑0和隐形的(recessive)逻辑1,信号每一次传输完后不需要返回到逻辑0(显性)的电平。
显性与隐性电平的解释:
CAN的数据总线有两条,一条是黄色的CAN_High,一条是绿色的CAN_Low。当没有数据发送时,两条线的电平一样都为2.5V,称为静电平,也就是隐性电平。当有信号发送时,CAN_High的电平升高1V,即3.5V,CAN_Low的电平降低1V,即1.5V。
按照定义的:
-
CAN_H-CAN_L < 0.5V 时候为隐性的,逻辑信号表现为"逻辑1"- 高电平。
-
CAN_H-CAN_L > 0.9V 时候为显性的,逻辑信号表现为"逻辑0"- 低电平。
5、CAN信号传输
发送过程: CAN控制器将CPU传来的信号转换为逻辑电平(即逻辑0-显性电平或者逻辑1-隐性电平)。CAN发射器接收逻辑电平之后,再将其转换为差分电平输出到CAN总线上。
接收过程: CAN接收器将CAN_H 和 CAN_L 线上传来的差分电平转换为逻辑电平输出到CAN控制器,CAN控制器再把该逻辑电平转化为相应的信号发送到CPU上。
5、CAN数据传输
CAN总线传输的是CAN帧,CAN的通信帧分成五种,分别为数据帧、远程帧、错误帧、过载帧和帧间隔。
数据帧根据仲裁段长度不同分为标准帧(2.0A)和扩展帧(2.0B)
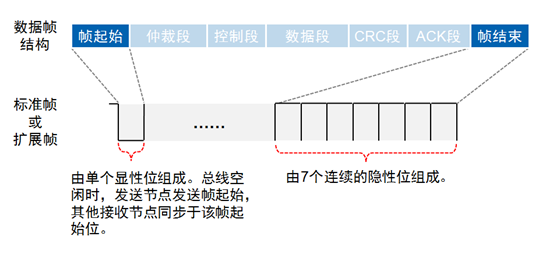
帧起始
由一个显性位(低电平)组成,发送节点发送帧起始,其他节点同步于帧起始;
帧结束
由7个隐形位(高电平)组成。
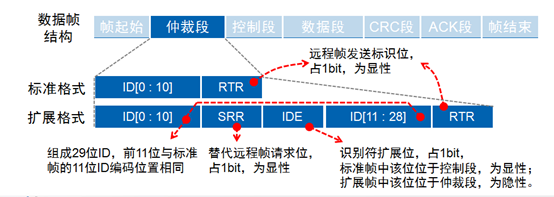
仲裁段
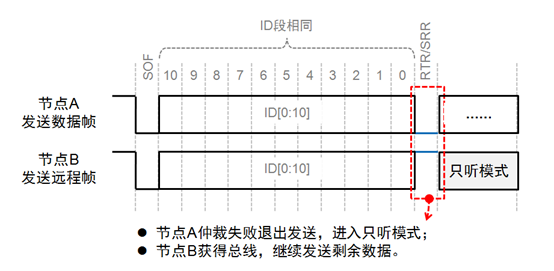
只要总线空闲,总线上任何节点都可以发送报文,如果有两个或两个以上的节点开始传送报文,那么就会存在总线访问冲突的可能。但是CAN使用了标识符的逐位仲裁方法可以解决这个问题。
CAN总线控制器在发送数据的同时监控总线电平,如果电平不同,则停止发送并做其他处理。如果该位位于仲裁段,则退出总线竞争;如果位于其他段,则产生错误事件。
帧ID越小,优先级越高。由于数据帧的RTR位为显性电平,远程帧为隐性电平,所以帧格式和帧ID相同的情况下,数据帧优先于远程帧;由于标准帧的IDE位为显性电平,扩展帧的IDE位为隐形电平,对于前11位ID相同的标准帧和扩展帧,标准帧优先级比扩展帧高。
数据段
一个数据帧传输的数据量为0~8个字节,这种短帧结构使得CAN-bus实时性很高,非常适合汽车和工控应用场合如图27所示。
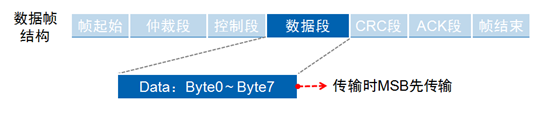
数据量小,发送和接收时间短,实时性高,被干扰的概率小,抗干扰能力强。
-
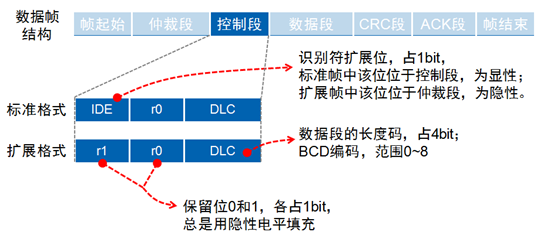
控制段
控制段共6位,标准帧的控制段由扩展帧标志位IDE、保留位r0和数据长度代码DLC组成;扩展帧控制段则由IDE、r1、r0和DLC组成如图17所示。
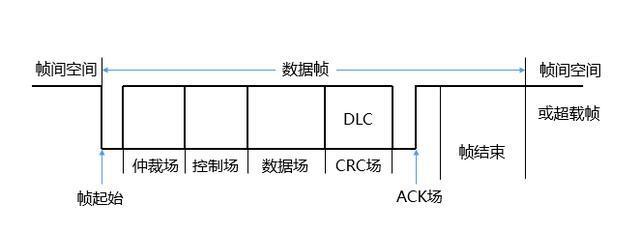
图2–6数据帧结构
-
数据段
一个数据帧传输的数据量为0~8个字节,这种短帧结构使得CAN-bus实时性很高,非常适合汽车和工控应用场合如图27所示。
图2–7数据段
数据量小,发送和接收时间短,实时性高,被干扰的概率小,抗干扰能力强。
-
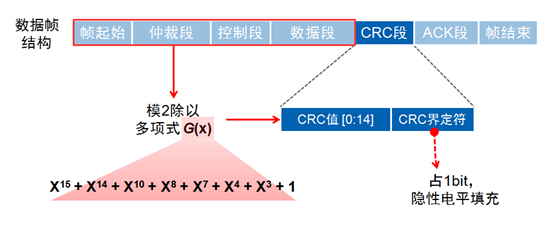
CRC段
CAN-bus使用CRC校验进行数据检错,CRC校验值存放于CRC段。 CRC校验段由15位CRC值和1位CRC界定符构成如图28所示。
图2–8CRC段
-
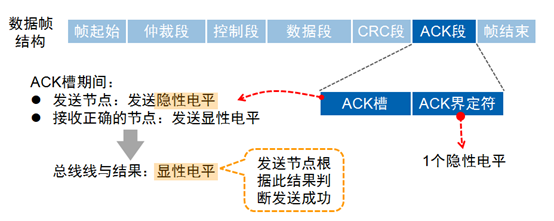
ACK段
当一个接收节点接收的帧起始到CRC段之间的内容没发生错误时,它将在ACK段发送一个显性电平如图29所示。
图2–9 ACK段
-
远程帧
与数据帧相比,远程帧结构上无数据段,由6个段组成,同理分为标准格式和扩展格式,且RTR位为1(隐性电平)如图31所示。
图3–1远程帧结构
如下图所示由于数据帧的RTR位为显性电平,远程帧的RTR位为隐性电平。
所以帧格式和帧ID都相同情况下,数据帧的优先级比远程帧优先级高如图32所示:
图3–2数据帧于远程帧仲裁机制
图3–3数据帧远程帧比较
数据帧与远程帧的区别如图33所示。
-
错误帧
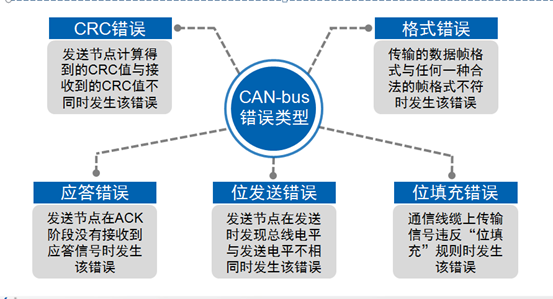
尽管CAN-bus是可靠性很高的总线,但依然可能出现错误;CAN-bus的错误类型共有5种(如图41所示)。
图4–1错误帧类型
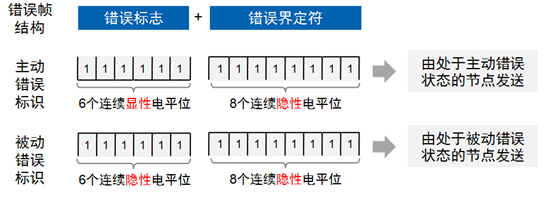
当出现5种错误类型之一时,发送或接收节点将发送错误帧。错误帧的结构如下,其中错误标识分为主动错误标识和被动错误标识如图42所示。
图4–2错误帧电平结构
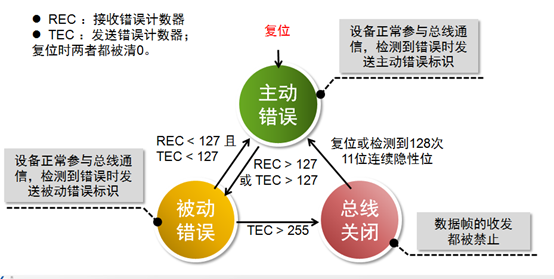
为防止自身由于某些原因导致无法正常接收的节点一直发送错误帧,干扰其他节点通信,CAN-bus规定了节点的3种状态及其行为如图43所示。
图4–3错误处理机制
(注:这些错误处理的机制是由硬件自主完成的这样做的目的就是只要CAN在收到数据肯定是正确的数据)。
-
过载帧与帧间隔
-
过载帧
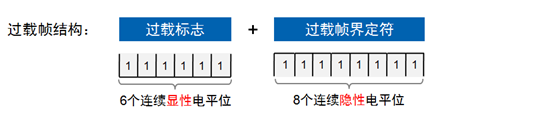
当某个接收节点没有做好接收下一帧数据的准备时,将发送过载帧以通知发送节点;过载帧由过载标志和过载帧界定符组成如所示图51。
图5–1过载帧结构
由于存在多个节点同时过载且过载帧发送有时间差问题,可能出现过载标志叠加后超过6个位的现象如所示图52。
图5–2过载帧具体结构
-
帧间隔
帧间隔用于将数据帧或远程帧和他们之前的帧分离开,但过载帧和错误帧前面不会插入帧间隔。
帧间隔过后,如果无节点发送帧,则总线进入空闲。
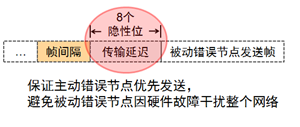
帧间隔过后,如果被动错误节点要发送帧,则先发送8个隐性电平的传输延迟,再发送帧。
-
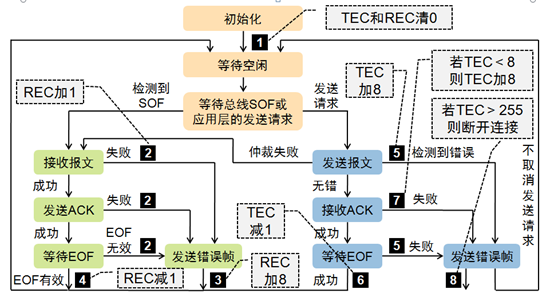
CAN总线发送总流程
CAN-bus整个链路层处理数据的流程是如图61所示:
图6–1CAN总线发送总流程
-
参考资料
《项目驱动--CAN-BUS现场总线基础教程----周立功,黄晓清》。
《现场总线技术及其应用第二版–清华大学出版社》。



------------------------------------------------------------------------------------------------------------------------------------------------------------------
数据帧
数据帧由 7 个不同位场组成(帧起始、仲裁场、控制场、数据场、CRC场、应答场、帧结尾)。
这里的位场,就是不同位的组合,这名字起的很烂,让人看了感觉很抽象。我们来看看这些个不同的位场吧。一开始是一位帧起始,也叫SOF。它用显性位表示,也就是0;它告诉我们,两个线上有电压差了,也就是有数据了。
这个帧起始看起来只有一位,其实不简单了。为了让所有的分站都同步于发送报文的发送站,好接收数据,有很多要考虑的地方。
远程帧
通过发送远程帧,总线的节点发出远程帧,请求以前发送给它数据帧的节点再发送一遍。具体发送哪个数据帧,由远程帧的标识符决定。
与数据帧类似,远程帧也有标准格式和扩展格式,而且都由6个不同的位场组成:帧起始、仲裁场、控制场、CRC场、应答场、帧结尾。
与数据帧相反,远程帧的RTR位是“隐性”的。它没有数据场,数据长度代码DLC的数值是不受制约的(可以标注为容许范围0~8里的任何数值),此数值是相应于数据帧的数据长度代码。远程帧结构如图所示:
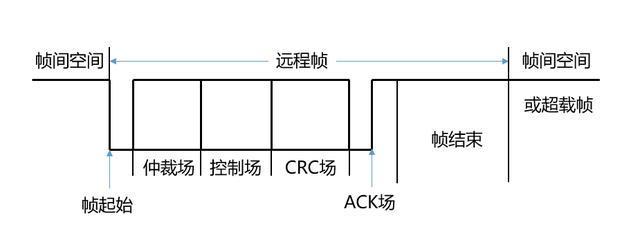
远程帧结构