本篇博文是看完西安电子科技大学的魏青老师的课程所做的学习笔记,特此记录。
多普勒效应及其应用
- 多普勒效应
- 连续波雷达
连续波雷达收发天线不共用 - 脉冲雷达(脉冲多普勒雷达)

- 连续波雷达
- 多普勒信息的提取
- 连续波雷达
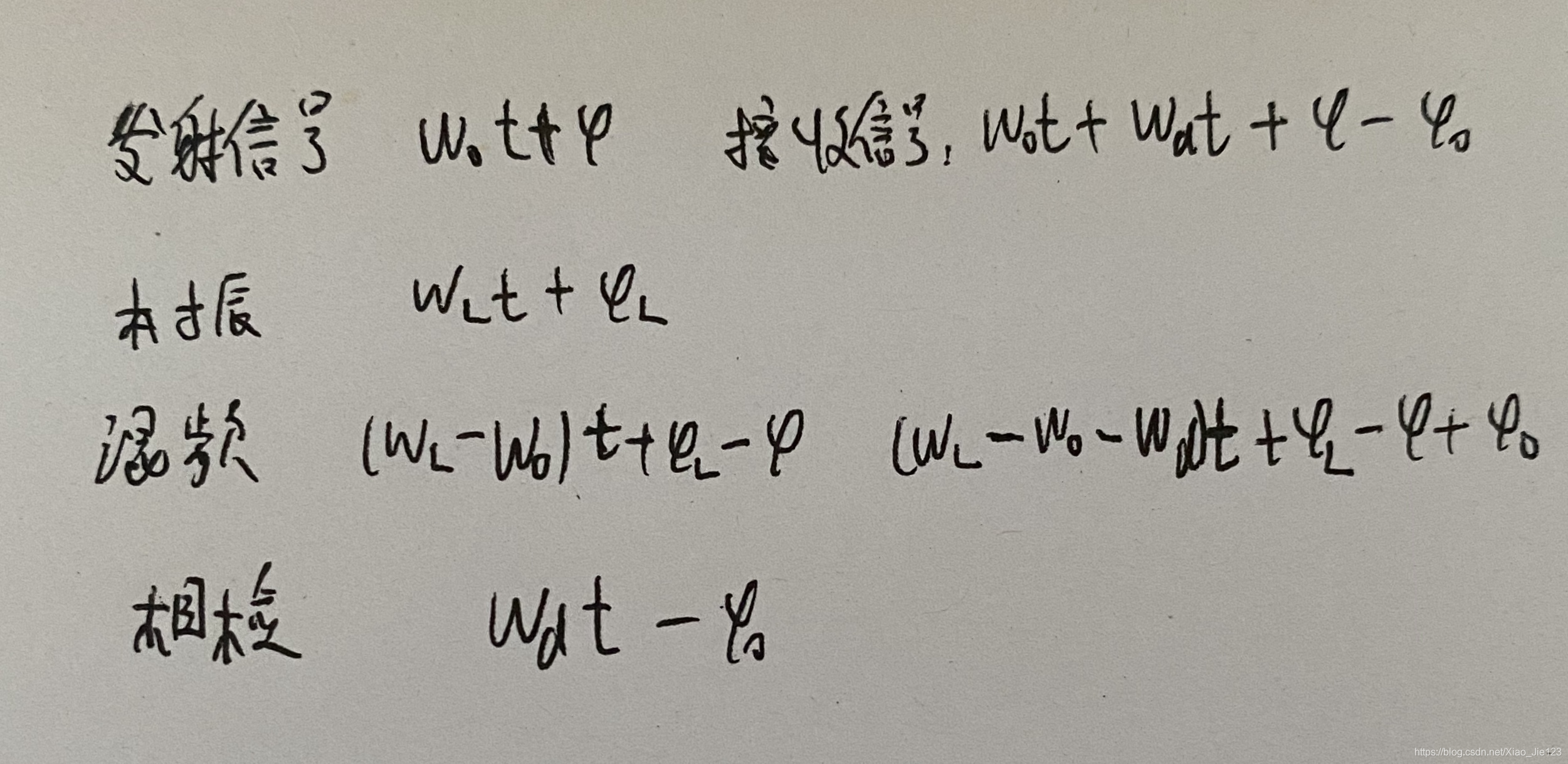
相位检波器:将发射的信号与接收到的信号进行混频,取低通。
连续波多普勒雷达的组成方框图

通过相位检波器得到的多普勒频率信号为:
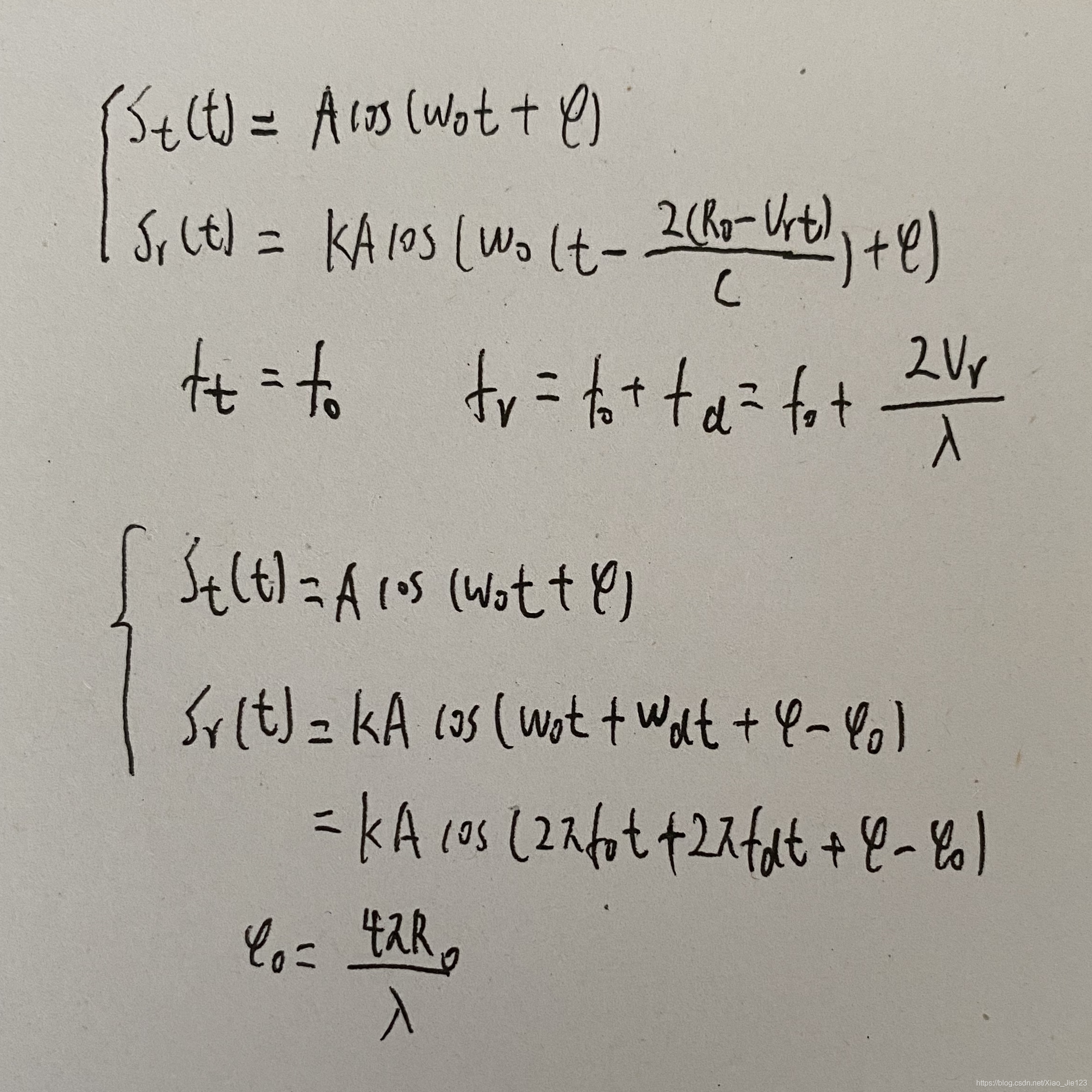
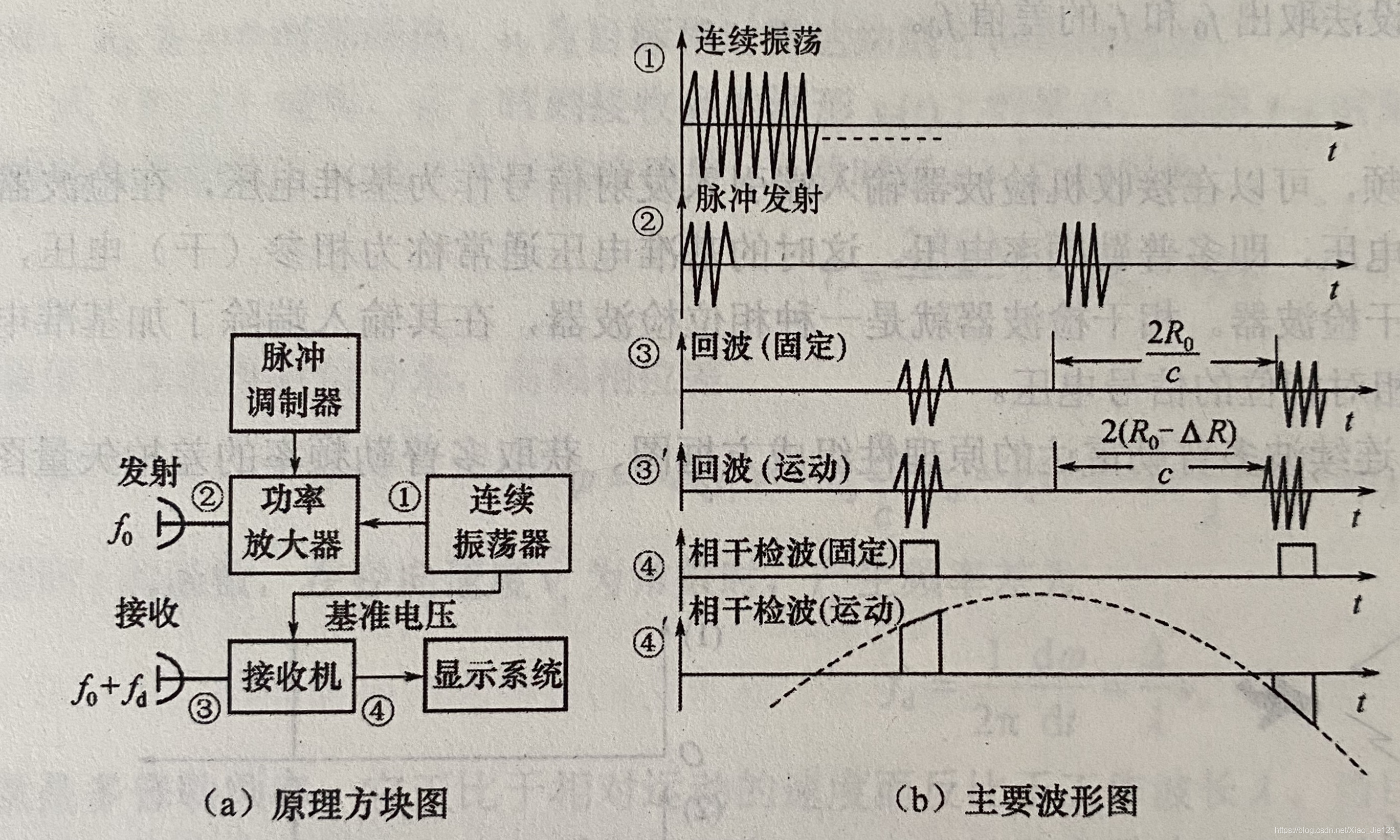
- 脉冲雷达
多普勒效应的脉冲雷达的原理方块图和主要波形
- 连续波雷达
- 盲速和频闪
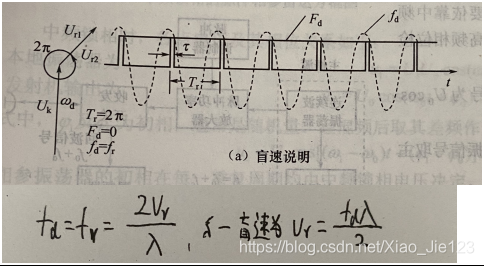
- 盲速
盲速是指当目标虽然有一定的径向速度vr,但若其回波信号经过相位检波器后,输出为一串等幅脉冲,与固定目标的回波相同,此时的目标速度为盲速
盲速产生的原因:当fd=nfr时,运动目标回波的谱线由nfr组成,频谱结构与固定目标回波的相同,这是无法区分运动目标与固定目标
盲速说明:
- 频闪
频闪说明:
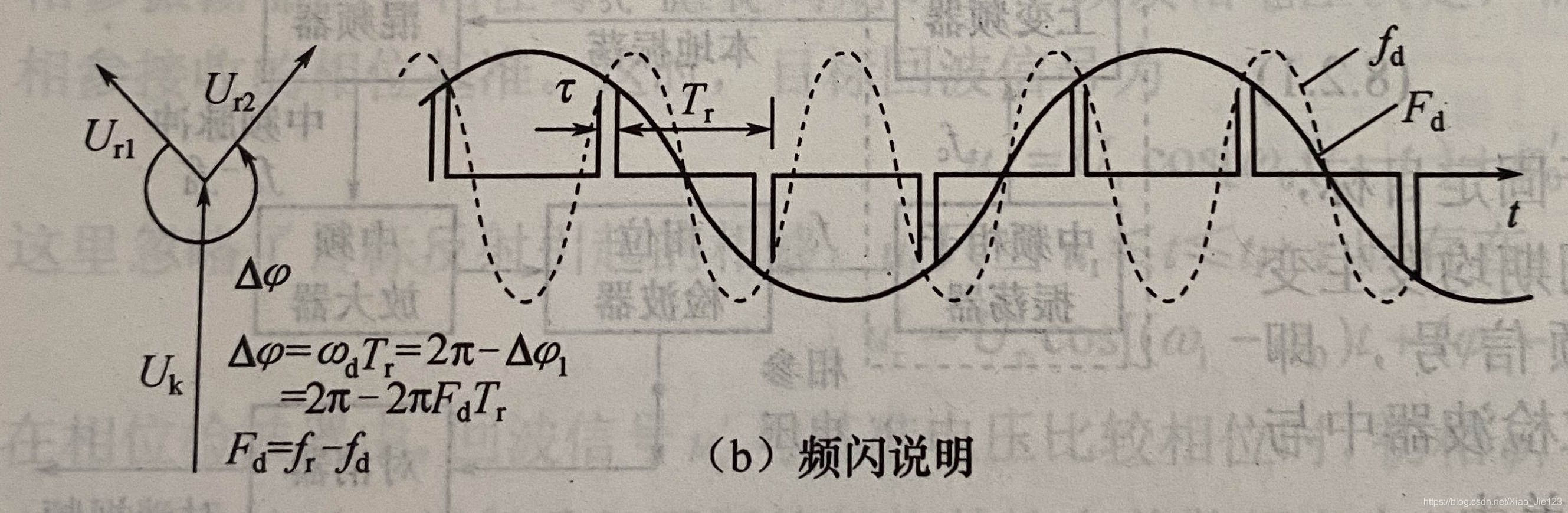
频闪是指当脉冲工作状态时,相位检波器输出端回波脉冲串的包络调制频率Fd与目标运动的径向速度vr不再保持正比例关系,此时如用包络调制频率测速时将产生测速模糊。
频闪产生的原因:当多普勒频率fd超过重复频率fr一半时,频率nfr的上边频分量nfr+fd与频率(n+1)fr-fd在谱线排列的前后位置上交叉。两个不同的多普勒频率fd1和fd2,只要满足fd1=nfr-fd2,则二者的谱线位置相同而无法区分。
避免频闪:|fd|<=fr/2
- 盲速
动目标显示雷达
- 基本工作原理
经过相捡后,去除固定目标回波 - 中频部分进行相检原理
- 消除固定目标回波
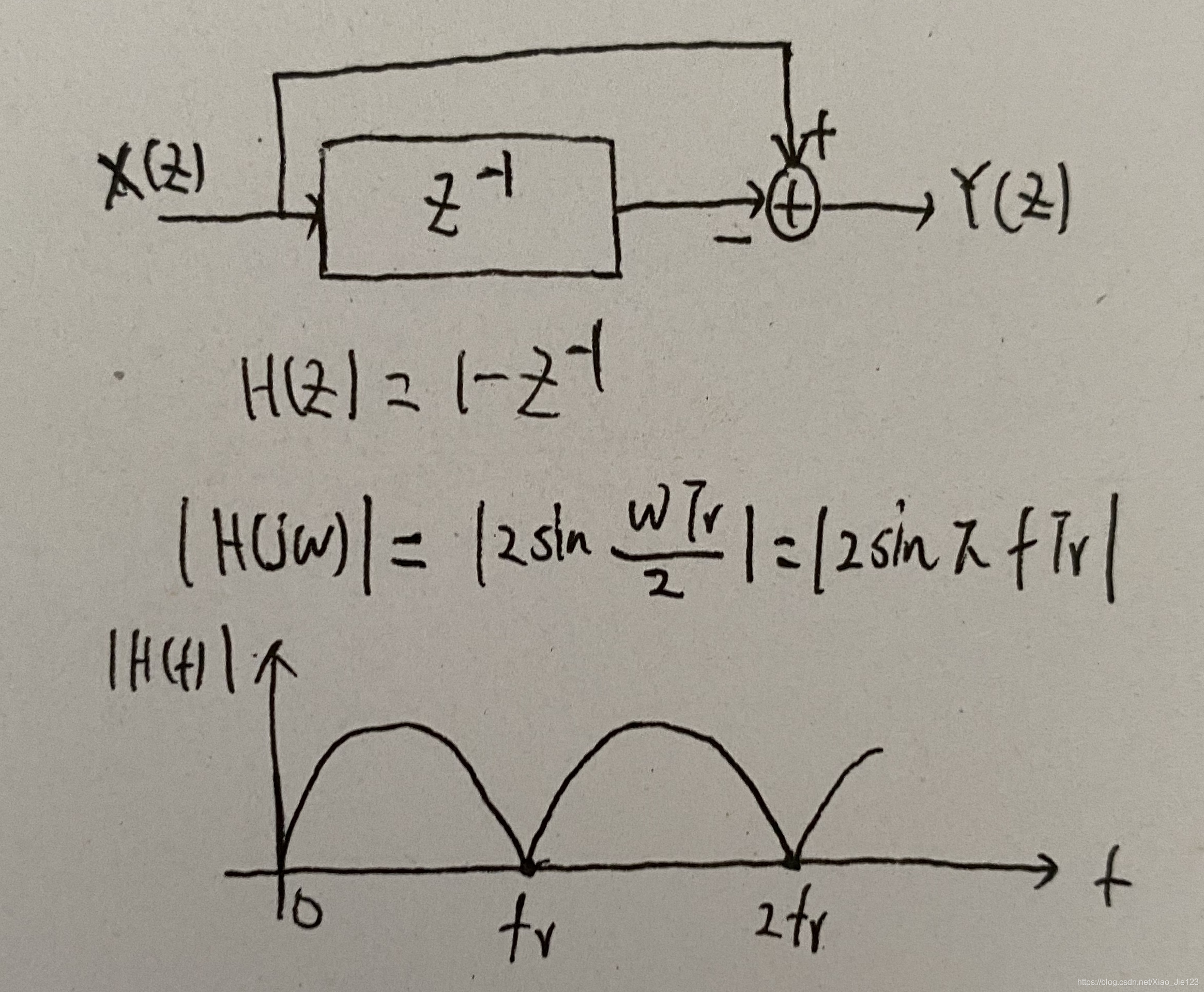
一次相消器
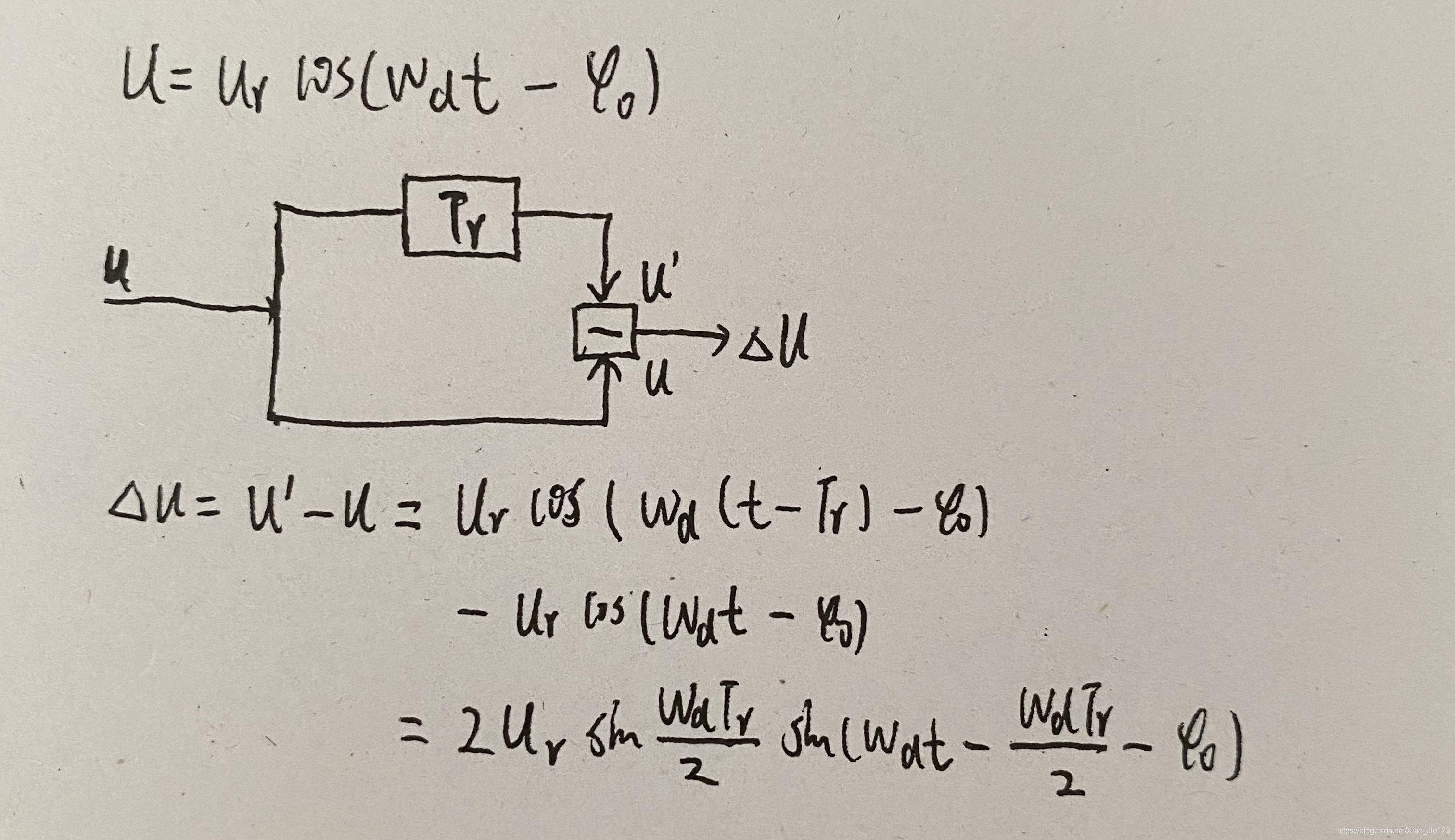
当wdTr/2=nπ(n=1,2,3,……)时,输出振幅为零。这时的目标速度相当于盲速。此时,运动目标回波在相位检波器的输出端与固定目标的回波相同,因此经过相消设备后输出为零。
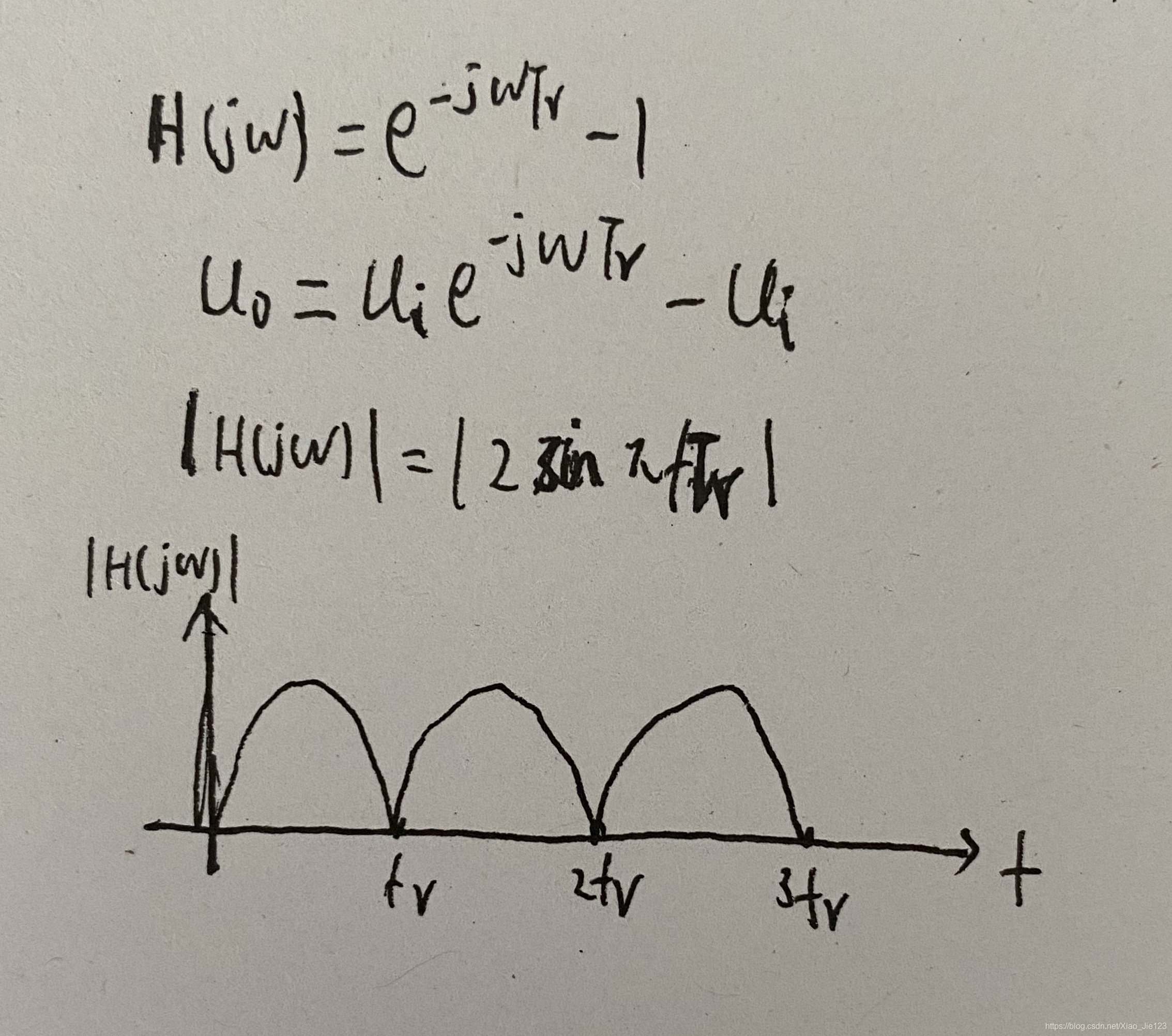
求解相消设备的频率相应特性:
盲速、盲相的影响及其解决途径
- 盲速
- 盲速出现的条件
最大不模糊距离R0max和第一盲速vr0’的关系:

- 重频参差
fd=n*(fr1与fr2的最小公倍数)
- 盲速出现的条件
- 盲相
- 分类
盲相问题是由检波器特性所引起的
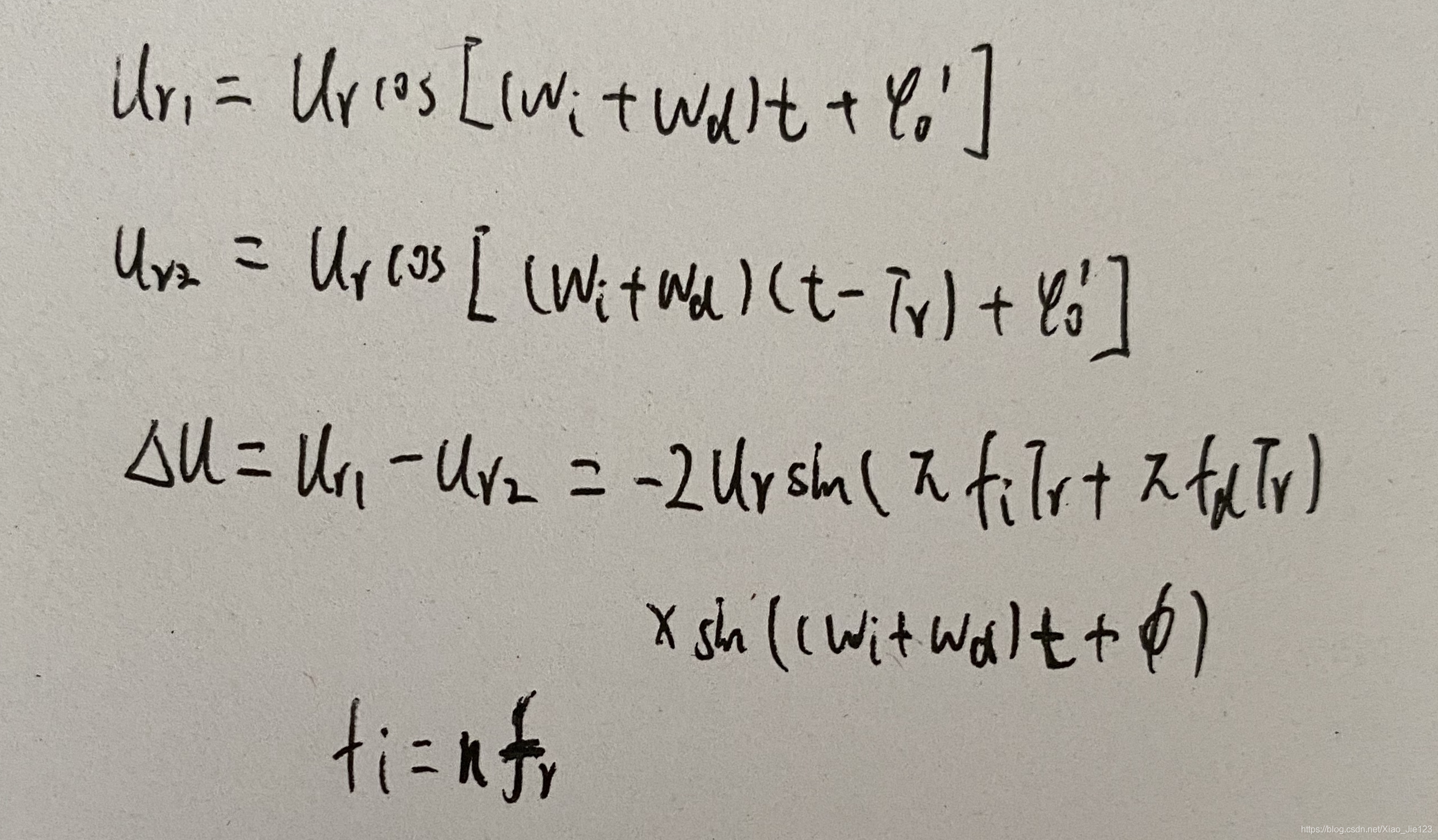
相位检波器输出经一次相消器后,运动目标回波为:

在某些点上,输出幅度为零,这些点称为盲相,它由相位检波器的特性决定。从相检特性上看,如果相邻两个回波的脉冲的相位相当于相检特性的a、c两点,其相位差虽不同,但却是一对相检器输出相等的工作点,因此,经过相消器后,其输出为零而出现盲相
相检特性和相消器输出脉冲波形

用矢量图来说明相消器的输出。匀速运动目标的回波信号用围绕基准电压均匀旋转的一个矢量来表示,旋转的速度等于其多普勒频率。相检器的输出为该矢量沿基准电压方向的投影,如下图所示,
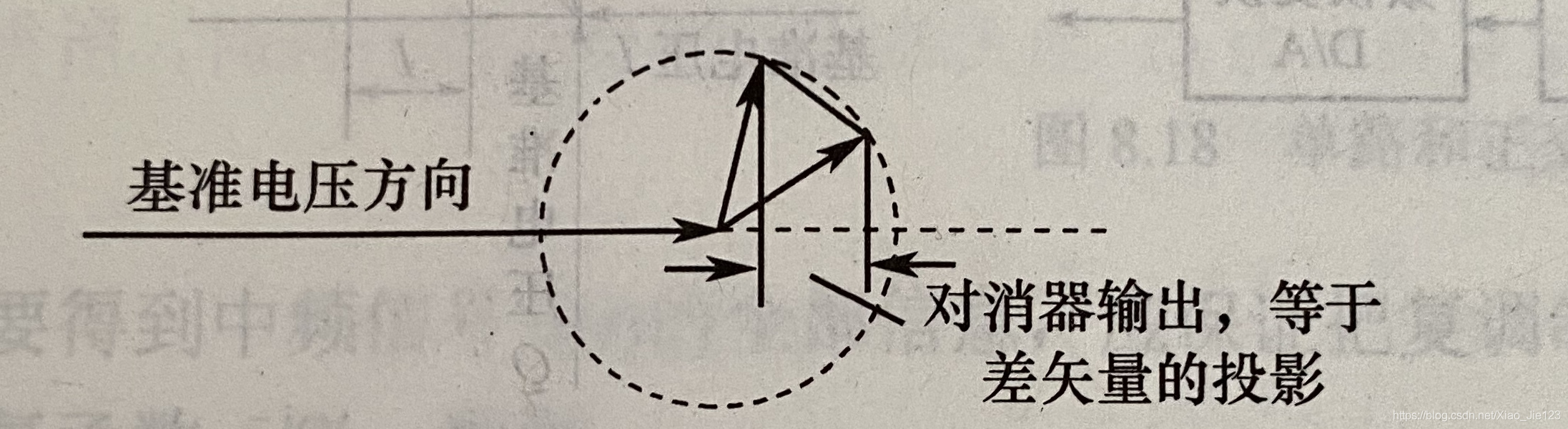
当差矢量垂直于该轴时,投影长度为零而出现点盲相
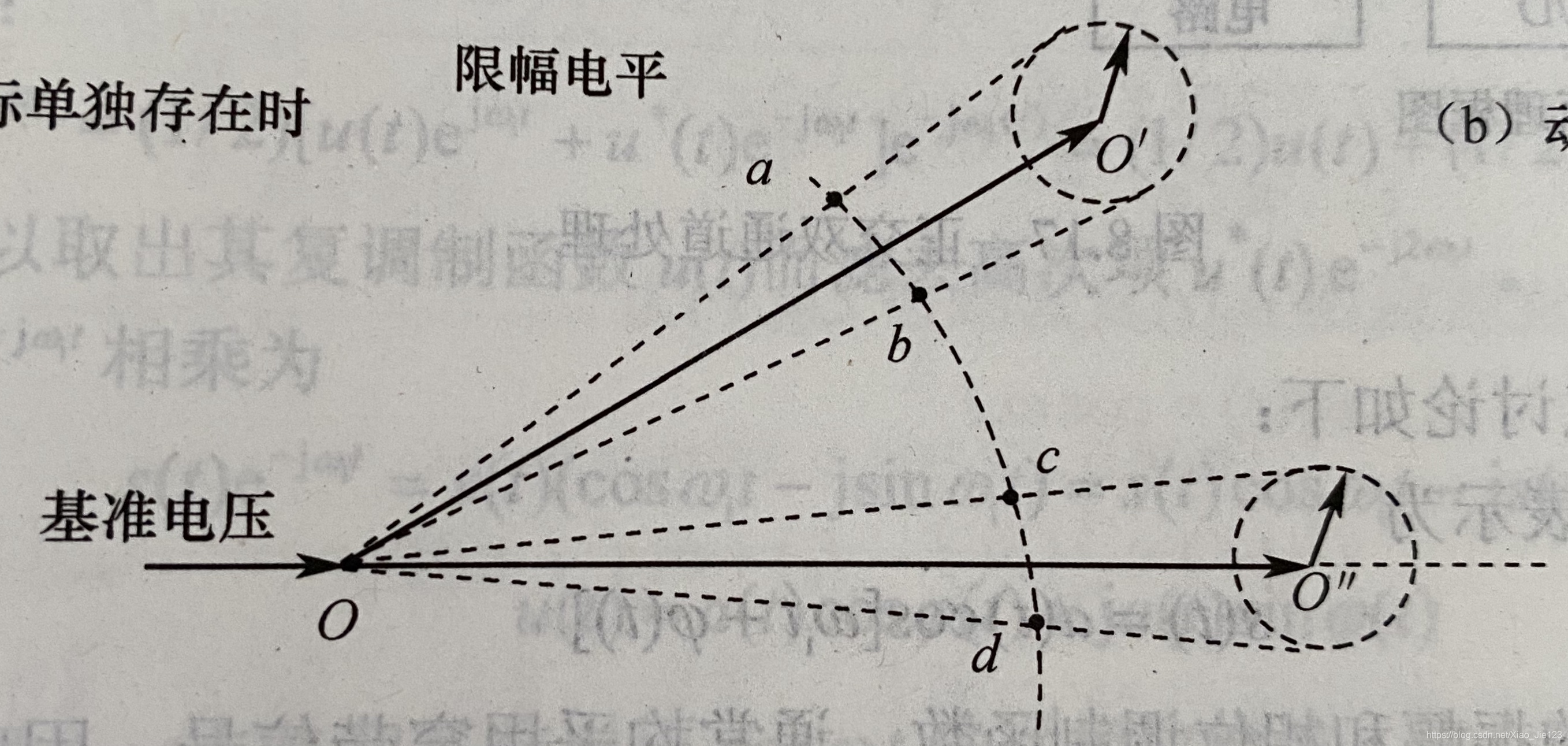
下图表示动目标与固定目标叠加:

如果运动目标回波叠加在固定杂波上,则在一般情况下也将产生点盲相。
如果回波叠加在很强的杂波上,可能产生连续盲相:接收机的限幅作用使动目标和固定杂波的合成矢量变成端点在限幅电平的一小段圆弧上来回摆动的矢量
- 解决办法
- 中频对消
- 零中频(I、Q双通道处理)
原理框图:
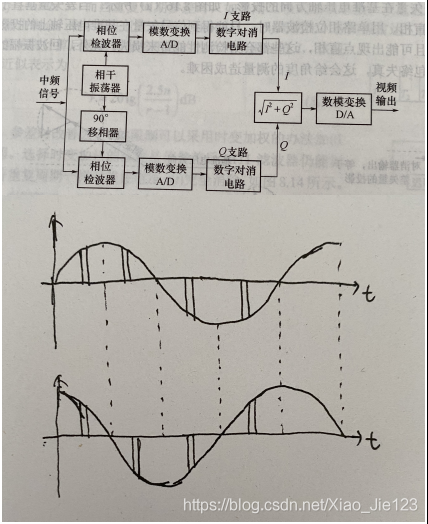
用正交双通道,则二路可以同时得到两个投影I和Q,它们互相正交,当一个为零时,另一个值最大。
- 中频对消
- 分类
回波和杂波的频谱及动目标显示滤波器
- 回波信号和杂波的频谱
- 雷达回波信号的频谱

天线扫描条件下的回波信号谱
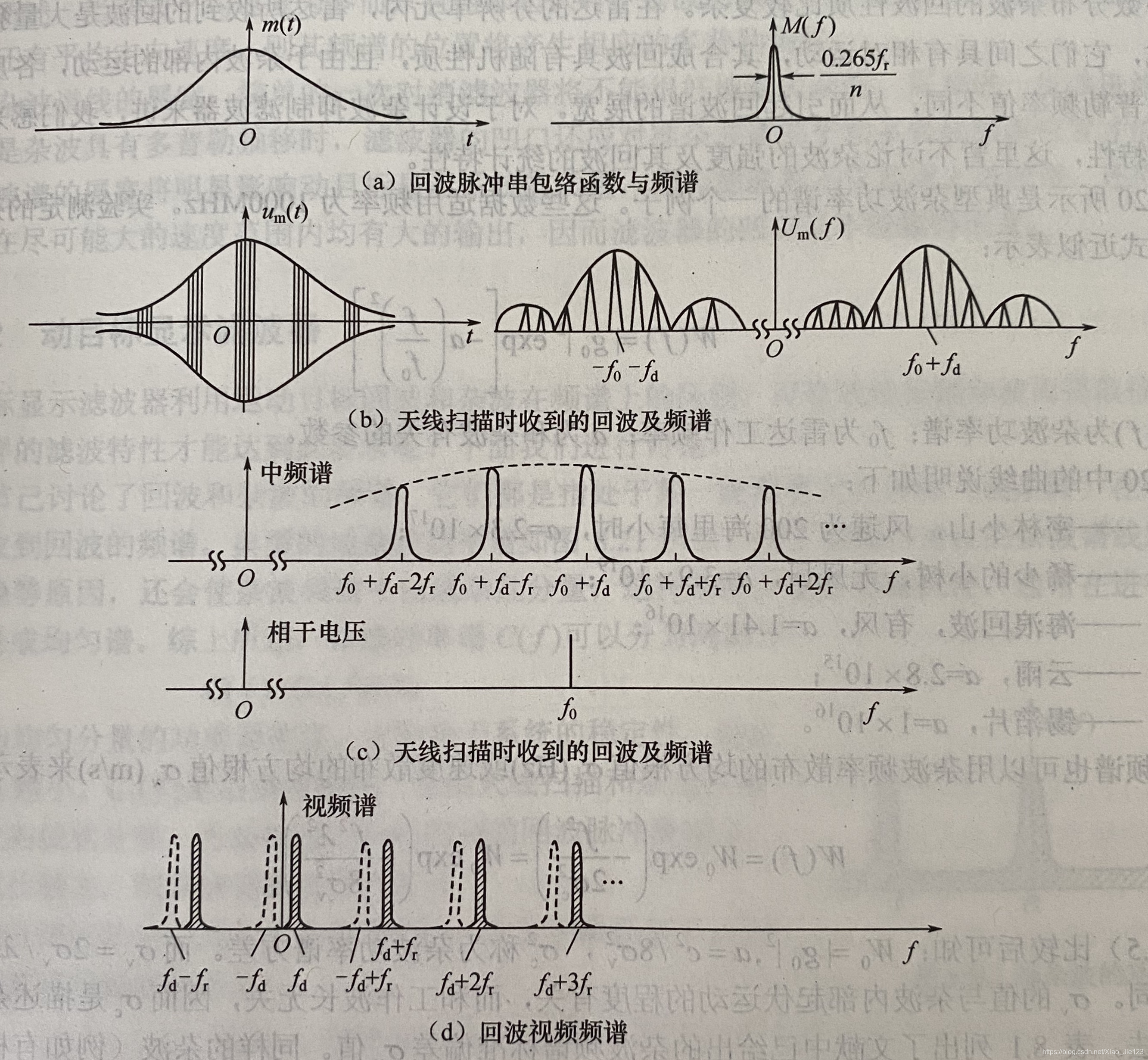
- 杂波频谱
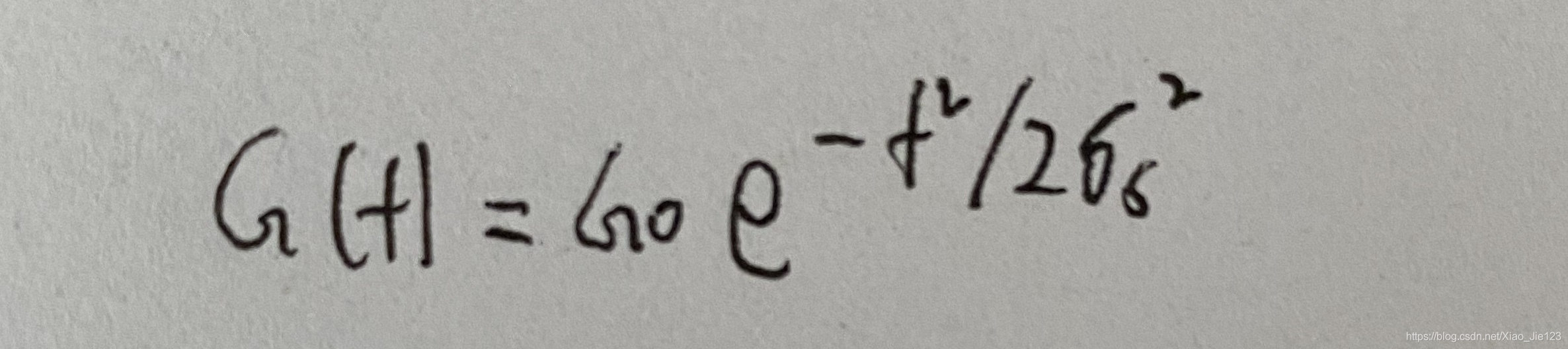
- 雷达回波信号的频谱
- 动目标显示滤波器
动目标检测(MTD)
- 动目标检测的特点
- 动态范围更大
- 改善因子提高

- 增加滤波器组
- 抑制杂波
- 增加杂波图
- 多普勒滤波器组
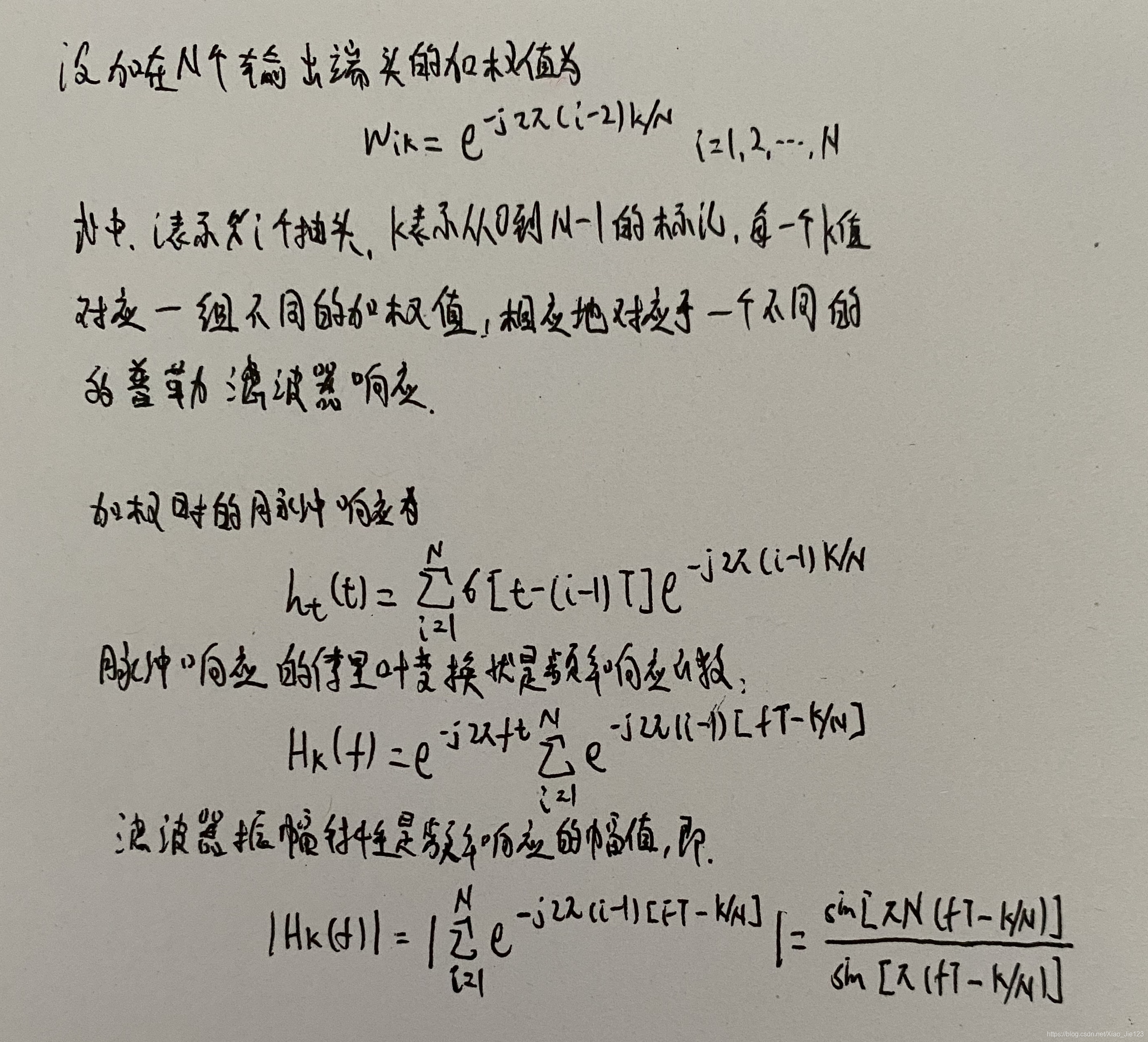
具有N个输出的横向滤波器(N个脉冲和N-1根延迟线)经过各脉冲不同的加权并求和后,可以做成N个相邻的窄带滤波器组。该滤波器组的频率覆盖范围为0~fr,fr为雷达工作重复频率
如下图所示(横向滤波器):

横向滤波器有N-1根延迟线,每根延迟线的延迟时间为Tr=1/fr。
上图b表示的是N=8时滤波器所得各标记k的滤波器频率响应
当幸福来敲门
下面的是笔者的微信公众号,欢迎关注,会持续更新c++、python、tensorflow、机器学习、深度学习、计算机视觉、雷达原理等系列文章。
