为了更好的给无人机建模,更好的给无人机建立数学模型,用于算法开发,我们测量了数据如下:
1无人机绕三轴转动惯量的测量
在此我们利用双线摆来测量三个转动惯量,其示意图和原理如下:
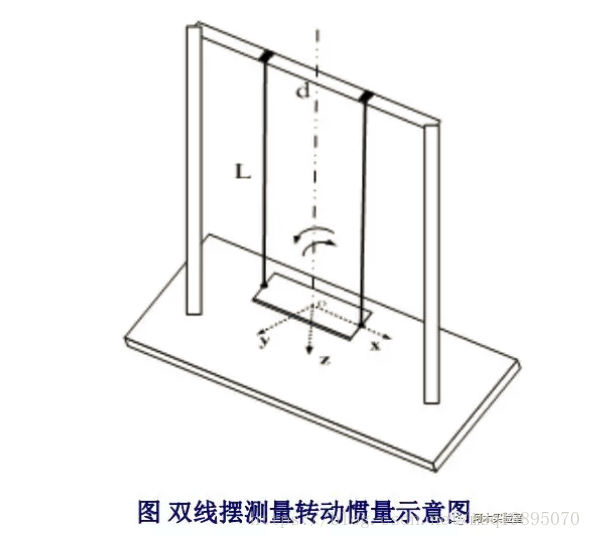
原理:以z轴为例,双线摆动的周期满足下列公式
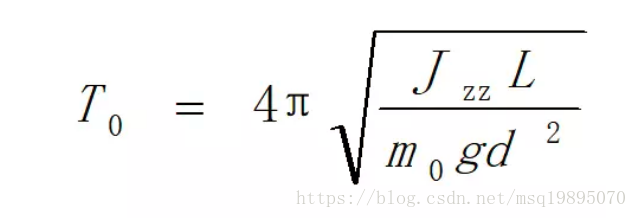
故可推出:
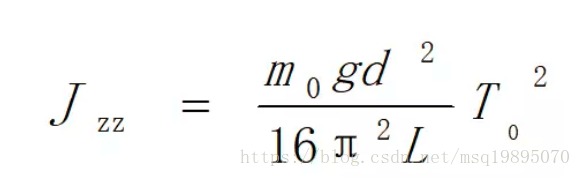
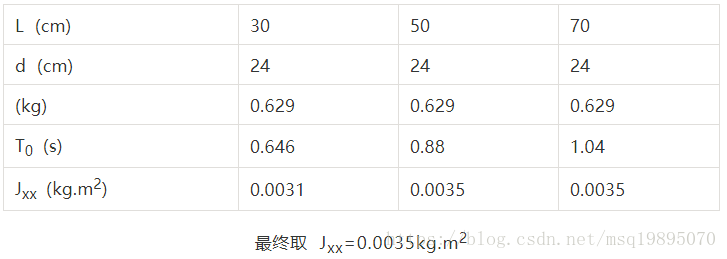
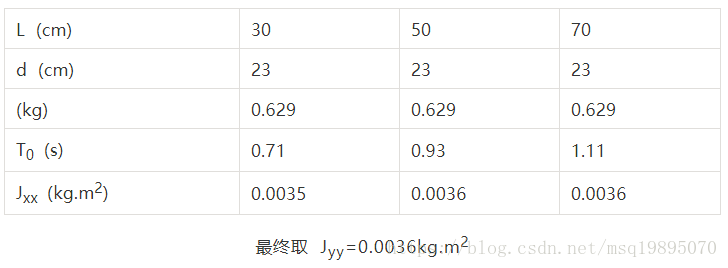
为了得到可靠的数据,特选择在L=30cm,50cm,70cm的不同条件下测出50个周期的时间,算出T0,带入公式算出不同条件下的J,最终获得了可靠的转动惯量测量值,测量数据结果记录如下:

扫描二维码关注公众号,回复:
1165993 查看本文章

重量m0=629g
绕X轴转动惯量:

原始数据记录:
绕Y轴转动惯量:

原始数据记录:
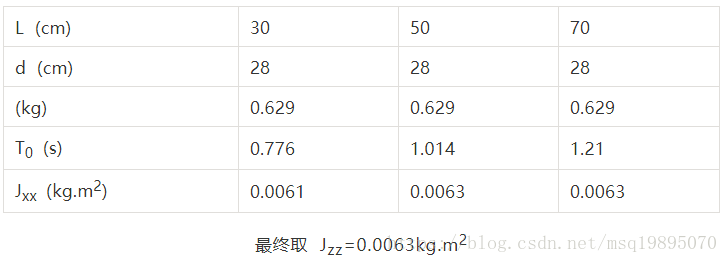
绕Z轴转动惯量:
为了确保数据的可靠性,测量了对角悬挂的两种方式(1,3悬挂和2,4悬挂,得出其实验结果相差无几)

2电机拉力曲线测量
测试装置如下:

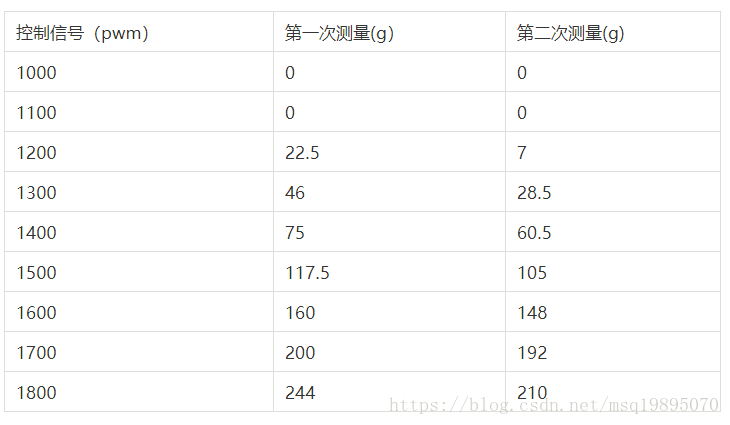
基本原理就是电阻应变片的变化与螺旋桨转动产生的拉力有一一对应关系,测得的数据如下:
利用EXCEL进行曲线拟合,结果如下:
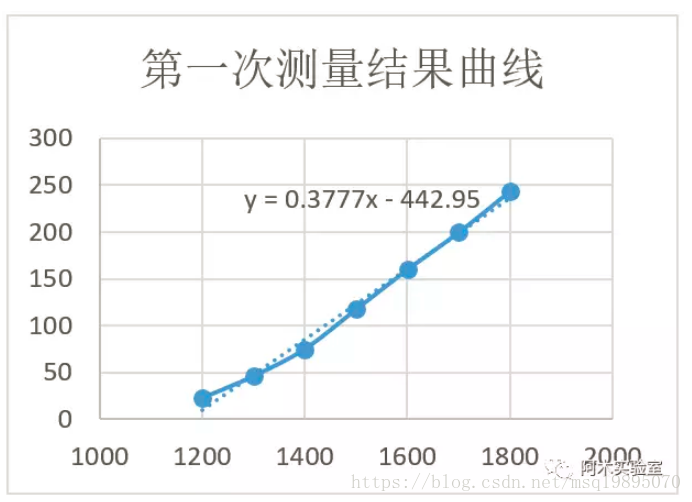
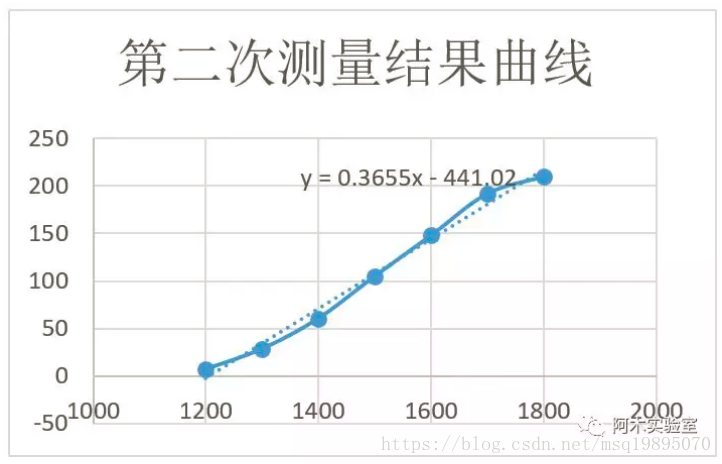
可以看出两次测量结果拟合出来的结果很相近,故PWM-拉力近似关系可认为如下式:
T=0.37*P-440
T-----拉力(g)
P-----pwm控制信号,在无人机的控制中取值为1000~2000
如果大家想知道这款飞机的飞行效果如何,可以查看我们往期的飞行测试视频(电脑端淘宝详情有介绍):
https://item.taobao.com/item.htm?spm=a1z10.1-c-s.w4004-17833877589.2.38bb6fdbpGggZN&id=561898591035