六轴六自由度机械臂轨迹跟踪的matlab实现(基于速度雅各比矩阵方法)
六轴六自由度机械臂轨迹跟踪的matlab实现(基于速度雅各比矩阵方法)
对于六轴六自由度机械臂进行轨迹规划,并针对其设计滑模控制器,实现机械臂的末端轨迹跟踪。(完整代码链接见文章末尾)
本文所用机械臂为innfos-Gluon-6L3,通过standard DH方法建模得到参数如下:

本文利用速度雅各比矩阵的方法来实现轨迹跟踪。这一方法的优点在于可以完全避免逆运动学求解,更加节省时间。
1.轨迹跟踪的控制结构图设计
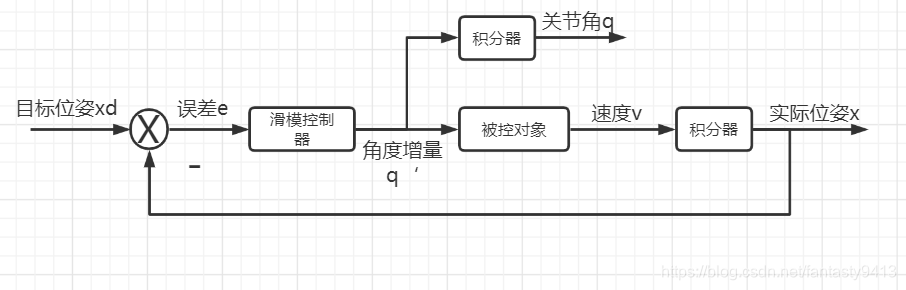
控制系统的输入,同样也是系统的期望输出,是机械臂的目标位姿 x d = ( x , y , z , α , β , γ ) x_d=(x,y,z,\alpha,\beta,\gamma) xd=(x,y,z,α,β,γ)。其刚好对应机械臂的六个自由度。前三者是机械臂末端坐标系相对于世界坐标系的位置,后三者是机械臂末端坐标系相对于世界坐标系的旋转角度。每一时刻的机械臂期望位姿都是已知的,它是通过轨迹规划得到的,这一点将在后文详细讲解。
系统的控制器采用滑模控制器,其输入为位姿误差 e = x d − x e=x_d-x e=xd−x,输出为角度增量 q ˙ \dot q q˙。
系统的被控对象是利用速度雅各比矩阵来建模的,其关系为 v = J ( q ) q ˙ v=J(q)\dot q v=J(q)q˙。其中 J ( q ) J(q) J(q)为速度雅各比矩阵。
系统的输出为机械臂的实际末端位置 x = ∫ v d t x=\int vdt x=∫vdt。
2.系统的输入:轨迹规划
为了使得机械臂的末端运动平滑,常对机械臂进行规划,对末端速度、加速度等进行一定约束。
工业上常使用七段式S型曲线来进行轨迹规划,其示意图图如下:
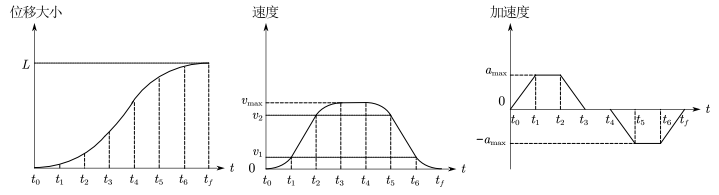
其有七个等间距时间段,分别为加加速段、加速度恒定段、加减速段、匀速段、减减速段、加速度恒定段、减加速段。
各段速度的计算表达式如下,其中 J J J为加加速度。
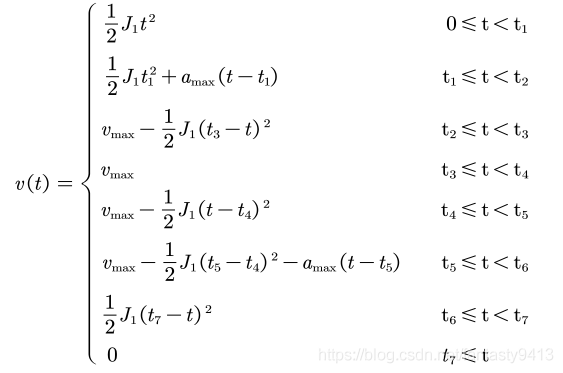
式中的 v m a x v_{max} vmax等参数的计算推导如下:
△ T = t i + 1 − t i = t f − t 0 7 L = 4 v m a x △ T v 2 = v 1 + a m a x △ T a m a x = 2 v 1 △ T v m a x = v 1 + v 2 = 2 v 1 + a m a x △ T = 4 v 1 L = 16 v 1 △ T → v 1 = L 16 △ T \bigtriangleup T=t_{i+1}-t_{i}=\frac{t_f-t_0}{7} \\ L=4v_{max} \bigtriangleup T \\ v_2=v_1+a_{max}\bigtriangleup T\\ a_{max}=\frac{2v_1}{\bigtriangleup T} \\ v_{max}=v_1+v_2=2v_1+a_{max}\bigtriangleup T=4v_1\\ L=16v_1 \bigtriangleup T \rightarrow v_1=\frac{L}{16\bigtriangleup T} △T=ti+1−ti=7tf−t0L=4vmax△Tv2=v1+amax△Tamax=△T2v1vmax=v1+v2=2v1+amax△T=4v1L=16v1△T→v1=16△TL
所以最终只需知道末端位移 L L L和所需时间 T T T,即可计算得到整个轨迹规划曲线。其matlab代码实现如下。
其中的 x _ s x\_s x_s、 y _ s y\_s y_s、 z _ s z\_s z_s分别为每时的机械臂末端位置,即期望期望位姿 x _ d x\_d x_d的前三行。 x _ d x\_d x_d的后三行为末端位置的姿态信息,在本次仿真中我们默认机械臂的姿态始终为0,所以 x _ d x\_d x_d的后三行总是为0。
%% 0.设定初始参数
% xyz_start=[0,-120.02,533.96]; %轨迹起点(关节角为0)的末端坐标,单位mm;
xyz_start=[0,-120.02,533.96];
xyz_end=[-30,-45,385]; %轨迹终点的末端坐标;
T=10; %完成轨迹规划的时间;
%% 1.轨迹规划
L=sqrt((xyz_end(1)-xyz_start(1))^2+(xyz_end(2)-xyz_start(2))^2+(xyz_end(3)-xyz_start(3))^2);
dt=T/7; %每段的时间长度
v1=L/(16*dt); %第一次加速度拐点
J=2*v1/(dt*dt); %加加速度
amax=dt*J; %最大加速度
v2=v1+dt*amax; %第二次加速度拐点
vmax=v2+v1; %第三次速度拐点
t1 = 1*dt;
t2 = 2*dt;
t3 = 3*dt;
t4 = 4*dt;
t5 = 5*dt;
t6 = 6*dt;
t7 = 7*dt;
t=0:0.1:T;
vt1=1/2*J*t.^2.*(t>=0 & t<t1);
vt2=(v1+amax*(t-t1)).*(t>=t1 & t<t2);
vt3=(vmax-1/2*J*(t3-t).^2).*(t>=t2 & t<t3);
vt4=vmax.*(t>=t3 & t<t4);
vt5=(vmax-1/2*J*(t-t4).^2).*(t>=t4 & t<t5);
vt6=(v2-amax*(t-t5)).*(t>=t5 & t<t6);
vt7=(1/2*J*(t7-t).^2).*(t>=t6 & t<t7);
vt=vt1+vt2+vt3+vt4+vt5+vt6+vt7; %各时刻速度
S=zeros(1,length(t)); %各时刻位移
for i=2:length(t)
S(i)=trapz(t(1:i),vt(1:i));
end
%各时刻xyz的位移
x_s=xyz_start(1)+(xyz_end(1)-xyz_start(1))/L*S;
y_s=xyz_start(2)+(xyz_end(2)-xyz_start(2))/L*S;
z_s=xyz_start(3)+(xyz_end(3)-xyz_start(3))/L*S;
%各时刻xyz轴的速度分量
v_x=(xyz_end(1)-xyz_start(1))/L*vt;
v_y=(xyz_end(2)-xyz_start(2))/L*vt;
v_z=(xyz_end(3)-xyz_start(3))/L*vt;
3.被控对象:速度雅各比矩阵
速度雅各比矩阵方法的关系表达式如下:
v = J ( q ) q ˙ v=J(q)\dot q v=J(q)q˙
前者 v v v是末端执行器的速度,后者 q ˙ \dot q q˙是关节角速度。表达式的物理意义是:当关节角度发生一个微小的变化 △ q \bigtriangleup q △q,末端执行器也会相应产生一个微小的位姿变化 △ x \bigtriangleup x △x。
速度的雅各比矩阵的求解方法有多种,如1.向量积方法 2.微分法 等等…
本文采用向量积的方法,求解方法如下。
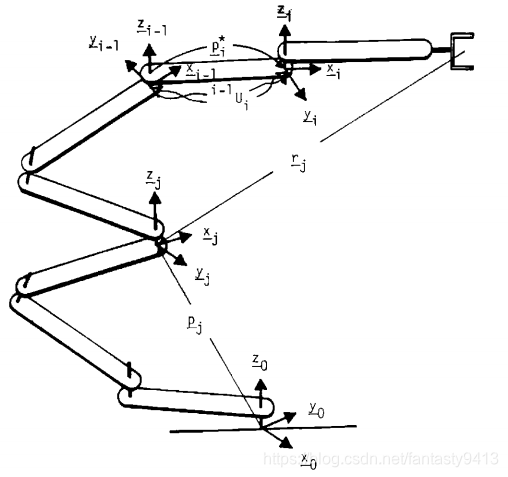
J ( q ) = [ J v J w ] = [ J 1 J 2 J 3 J 4 J 5 J 6 ] J i = [ Z i − 1 × r i − 1 Z i − 1 ] = [ Z i − 1 × ( P n − P i − 1 ) Z i − 1 ] J(q)=\begin{bmatrix}J_v\\J_w\end{bmatrix}=\begin{bmatrix}J_1&J_2&J_3&J_4&J_5&J_6\end{bmatrix}\\ J_i=\begin{bmatrix}Z_{i-1} \times r_{i-1}\\Z_{i-1}\end{bmatrix}=\begin{bmatrix}Z_{i-1} \times (P_n-P_{i-1})\\Z_{i-1}\end{bmatrix} J(q)=[JvJw]=[J1J2J3J4J5J6]Ji=[Zi−1×ri−1Zi−1]=[Zi−1×(Pn−Pi−1)Zi−1]
本文采用的机械臂有6个关节角,因此其速度雅各比矩阵有6列,分别为 J i J_i Ji。本文的机械臂有6个自由度,因此对应的矩阵为6行。
每个雅各比矩阵分量 J i J_i Ji的后三行为 { i − 1 } \{i-1\} {
i−1}坐标系相对于世界坐标系的 Z Z Z轴分量;分量 J i J_i Ji的前三行为 Z i − 1 Z_{i-1} Zi−1与 r i − 1 r_{i-1} ri−1的差乘, r i − 1 r_{i-1} ri−1是末端坐标系与 { i − 1 } \{i-1\} {
i−1}坐标系的相对位置在世界坐标系中的表示。
这种方法求解只适用于standard DH方法建模的模型,若使用modify DH方法建模,则需对上式的下标做一定修改。
此方法的matlab代码实现如下:
function [ J ] = Jacob_cross_SDH( q )
%JACOB_CROSS_SDH 函数摘要
% 输入q0为逼近角,单位为弧度,矩阵大小1*6;
% 输出J为速度雅各比矩阵,矩阵大小6*6;
% 说明:利用向量积的方法求解系统的雅各比矩阵,方法1和方法2任选一种
% 说明:此求解方法基于SDH参数建模,若MDH方法建模,需进行一定的下标改动
d=[105.03,0,0,75.66,80.09,44.36];
a=[0,-174.42,-174.42,0,0,0];
alp=[pi/2,0,0,pi/2,-pi/2,0];
offset=[0,-pi/2,0,-pi/2,0,0];
thd=q+offset;
% 求各个关节间的变换矩阵
T0=trotz(0)*transl(0,0,0)*trotx(0)*transl(0,0,0);
T1=trotz(thd(1))*transl(0,0,d(1))*trotx(alp(1))*transl(a(1),0,0);
T2=trotz(thd(2))*transl(0,0,d(2))*trotx(alp(2))*transl(a(2),0,0);
T3=trotz(thd(3))*transl(0,0,d(3))*trotx(alp(3))*transl(a(3),0,0);
T4=trotz(thd(4))*transl(0,0,d(4))*trotx(alp(4))*transl(a(4),0,0);
T5=trotz(thd(5))*transl(0,0,d(5))*trotx(alp(5))*transl(a(5),0,0);
T6=trotz(thd(6))*transl(0,0,d(6))*trotx(alp(6))*transl(a(6),0,0);
% 求各个关节相对于惯性坐标系的变换矩阵
T00 = T0;
T01 = T1;
T02 = T1*T2;
T03 = T1*T2*T3;
T04 = T1*T2*T3*T4;
T05 = T1*T2*T3*T4*T5;
T06 = T1*T2*T3*T4*T5*T6;
% 求各个关节相对于末端坐标系的变换矩阵
T06 = T1*T2*T3*T4*T5*T6;
T16 = T2*T3*T4*T5*T6;
T26 = T3*T4*T5*T6;
T36 = T4*T5*T6;
T46 = T5*T6;
T56 = T6;
% 提取各变换矩阵的旋转矩阵
R00 = t2r(T00);
R01 = t2r(T01);
R02 = t2r(T02);
R03 = t2r(T03);
R04 = t2r(T04);
R05 = t2r(T05);
R06 = t2r(T06);
% 取旋转矩阵第3列,即Z轴方向分量
Z0 = R00(: , 3);
Z1 = R01(: , 3);
Z2 = R02(: , 3);
Z3 = R03(: , 3);
Z4 = R04(: , 3);
Z5 = R05(: , 3);
Z6 = R06(: , 3);
%% Method.1
% 求末端关节坐标系相对于前面各个坐标系的位置,即齐次变换矩阵的第四列
% pi6为坐标系i和末端坐标系的相对位置在坐标系i下的表示
P06 = T06(1:3, 4);
P16 = T16(1:3, 4);
P26 = T26(1:3, 4);
P36 = T36(1:3, 4);
P46 = T46(1:3, 4);
P56 = T56(1:3, 4);
P66 = [0; 0; 0];
% 使用向量积求出雅可比矩阵
% R0i为坐标系0到坐标系i的旋转矩阵
% R0i*Pi6指坐标系i和末端坐标系的相对位置在0坐标系下的表示
J1 = [cross(Z0, R00*P06); Z0];
J2 = [cross(Z1, R01*P16); Z1];
J3 = [cross(Z2, R02*P26); Z2];
J4 = [cross(Z3, R03*P36); Z3];
J5 = [cross(Z4, R04*P46); Z4];
J6 = [cross(Z5, R05*P56); Z5];
%% Method.2
% % pi为坐标系i与世界坐标系0的相对位置
% p0=transl(T00);
% p1=transl(T01);
% p2=transl(T02);
% p3=transl(T03);
% p4=transl(T04);
% p5=transl(T05);
% p6=transl(T06);
%
% % p6-pi为i坐标系指向末端坐标系的向量
% % p6-pi即为末端坐标系与i坐标系相对位置在世界坐标系中的表示
% % Ji=[Jv;Jw] 对应六自由度的速度分量和旋转分量
% J1 = [cross(Z0, p6-p0); Z0];
% J2 = [cross(Z1, p6-p1); Z1];
% J3 = [cross(Z2, p6-p2); Z2];
% J4 = [cross(Z3, p6-p3); Z3];
% J5 = [cross(Z4, p6-p4); Z4];
% J6 = [cross(Z5, p6-p5); Z5];
J = [J1, J2, J3, J4, J5, J6];
end
4.控制器:等速率趋近的滑模控制器
控制器的输入为位姿误差 e = x d − x e=x_d-x e=xd−x,输出为关节角的增量 q ˙ \dot q q˙,因此控制器满足关系:
u = q ˙ = f _ S M C ( e ) u=\dot q=f\_SMC(e) u=q˙=f_SMC(e)
为此需求设计滑模控制器 f _ S M C f\_SMC f_SMC。
设计滑模面:
s = c e e = x d − x s=ce\\ e=x_d-x s=cee=xd−x
设计趋近率为等速趋近率:
s ˙ = − ξ s g n s \dot s=-\xi sgns s˙=−ξsgns
推导得到控制器输出 u u u:
s ˙ = c e ˙ = − ξ s g n s e ˙ = x ˙ d − x ˙ = − 1 c ξ s g n s v = v d + 1 c ξ s g n s u = q ˙ = J − 1 ( q ) v = J − 1 ( v d + 1 c ξ s g n s ) \dot s=c\dot e=-\xi sgns\\ \dot e=\dot x_d-\dot x=-\frac{1}{c}\xi sgns\\ v=v_d+\frac{1}{c}\xi sgns\\ u=\dot q=J^{-1}(q)v=J^{-1}(v_d+\frac{1}{c}\xi sgns) s˙=ce˙=−ξsgnse˙=x˙d−x˙=−c1ξsgnsv=vd+c1ξsgnsu=q˙=J−1(q)v=J−1(vd+c1ξsgns)
matlab代码实现如下:
dth = [0; 0; 0; 0; 0; 0];
th = [0; 0; 0; 0; 0; 0];
x=[xyz_start';0;0;0]; %其实时刻的位姿
lamda=1; %阻尼矩阵的系数
k = 0.1;
ita = 0.0002;
c = 5;
e = [0; 0; 0; 0; 0; 0];
de = [0; 0; 0; 0; 0; 0];
for i = 1 : length(t)
xd=[x_s(i);y_s(i);z_s(i);0;0;0]; %期望位姿
dxd=[v_x(i);v_y(i);v_z(i);0;0;0]; %期望速度
q=th(:, i);
Jac = Jacob_cross_SDH(q'); %求解当前角度下的雅可比矩阵
e(:, i) = xd - x(:,i); %误差
s = c*e(:, i); %滑模面
v=dxd + (1/c)*ita*sign(s); %机械臂的末端实际速度
de(:, i) = dxd - v; %误差的微分
dth(:, i) = inv(Jac+lamda.*diag(ones(1,6)))*v; %关节角的增量
th(:, i + 1) = th(:, i) + dth(:, i)*0.1; %下一时刻的关节角度
x(:, i+1) = x(:, i) + v*0.1; %机械臂末端实际位姿
end
5.结果展示
设定轨迹跟踪起始点和终点:
[ 0 − 120.02 533.96 ] → [ − 30 − 45 385 ] \begin{bmatrix}0\\-120.02\\533.96\end{bmatrix} \rightarrow \begin{bmatrix}-30\\-45\\385\end{bmatrix} ⎣⎡0−120.02533.96⎦⎤→⎣⎡−30−45385⎦⎤
10 s 10s 10s内的末端轨迹位置在各坐标轴的映射:

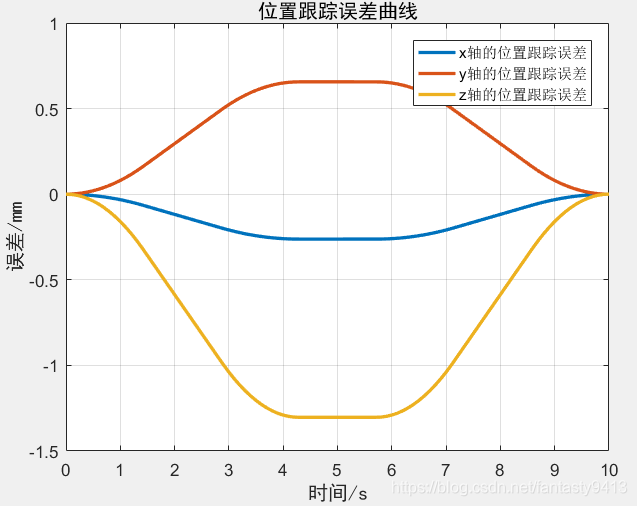
10 s 10s 10s内系统跟踪末端轨迹位置的误差:
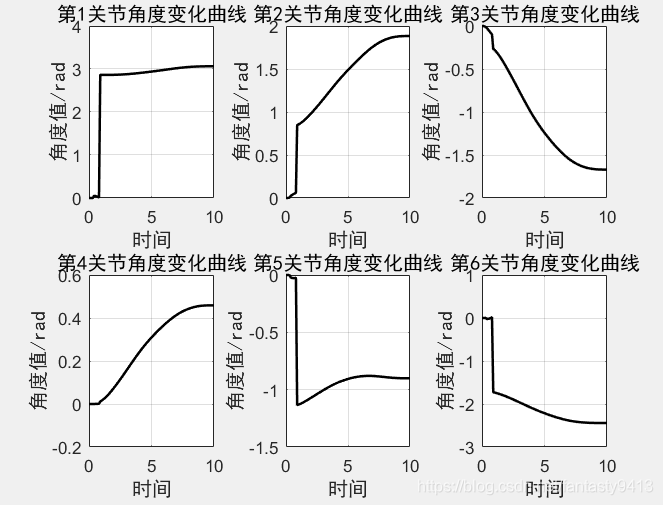
10 s 10s 10s内各个关节角的角度:
源代码下载链接:https://github.com/Fantasty9413/Trajectory-tracking-