一、简介
蚁群算法,也是优化算法当中的一种。蚁群算法擅长解决组合优化问题。蚁群算法能够有效的解决著名的旅行商问题(TSP),不止如此,在其他的一些领域也取得了一定的成效,例如工序排序问题,图着色问题,网络路由问题等等。接下来便为大家简单介绍蚁群算法的基本思想。
蚁群算法,顾名思义就是根据蚁群觅食行为而得来的一种算法。单只蚂蚁的觅食行为貌似是杂乱无章的,但是据昆虫学家观察,蚁群在觅食时总能够找到离食物最近的路线,这其中的原因是什么呢?其实,蚂蚁的视力并不是很好,但是他们又是凭借什么区寻找到距离食物的最短路径的呢?经过研究发现,每一只蚂蚁在觅食的过程中,会在沿途释放出一种叫做信息素的物质。其他蚂蚁会察觉到这种物质,因此,这种物质会影响到其他蚂蚁的觅食行为。当一些路径上经过的蚂蚁越多时,这条路径上的信息素浓度也就越高,其他蚂蚁选择这条路径的可能性也就越大,从而更增加了这条路径上的信息素浓度。当然,一条路径上的信息素浓度也会随着时间的流逝而降低。这种选择过程被称之为蚂蚁的自催化行为,是一种正反馈机制,也可以将整个蚁群认定为一个增强型学习系统。
为了让大家更好的理解上文中提到的蚁群觅食行为,这里通过一张图片来说明蚁群觅食行为。
如图所示,A点为一个蚁穴,设定其中有两只蚂蚁,蚂蚁1和蚂蚁2。B点为食物所在位置,C点只是路径上的一点。假设ABC形成一个等边三角形,且两只蚂蚁的移动速度均相同。
在t0时刻,两只蚂蚁在蚁穴中,在他们面前有两条路可以选择,即AB或AC。两只蚂蚁随机进行选择,我们假设蚂蚁1选择了路径AC,而蚂蚁2选择了路径AB。
在t1时刻是,蚂蚁1走到了C点,而蚂蚁2走到了B点,即食物所在位置。他们在其经过的路径上释放了信息素,在途中用虚线表示。之后蚂蚁2将食物运往蚁穴,并依然在沿途释放信息素,蚂蚁1则从C点向B点进发。
等到t2时刻时,蚂蚁2到达了蚁穴A点,蚂蚁1到达了食物所在位置B点,此时蚂蚁2再次出发去搬运食物,它发现AB路径上的信息素浓度要高于AC路径上的信息素浓度(AB路径上有两条虚线,AC路径上只有1条虚线)。因此蚂蚁2选择AB路径去搬运食物,而蚂蚁1则在B点获取到了食物,接下来返回蚁穴,但是它也有两种选择,一种是原路返回,另一种便是走线路AB。蚂蚁1发现AB路径上的信息素浓度要高于AC路径上的信息素浓度,因此它将选择AB来返回蚁穴。
如此往复,AC路径的信息素浓度会越来越低,AB路径上的信息素浓度会越来越高,所以AC路径上将没有蚂蚁再次经过,两只蚂蚁都只会选择路径较短的AB线路去搬运食物。
二、源代码
clc
clear
close all
E=0.000001;
maxnum=30;%最大迭代次数
narvs=3;%目标函数的自变量个数
particlesize=20;%粒子群规模
c1=1.2;%每个粒子的个体学习因子,加速度常数
c2=1.6;%每个粒子的社会学习因子,加速度常数
w=0.8;%惯性因子
vmax1=0.5;%粒子的最大飞翔速度
vamx2=-0.5;
v=rand(particlesize,narvs);%粒子飞翔速度
x=zeros(particlesize,3);
x(:,1)=1+rand(1);
x(:,2)=7+rand(1);%粒子所在位置
x(:,3)=0.2+0.1*rand(1);
%定义适应度函数
% ROUT=zeros(particlesize,100);
for i=1:particlesize
[TT(i),ROUT{
i},f(i)]=ACO(x(i,1),x(i,2),x(i,3));
end
personalbest_x=x;
personalbest_faval=f;
% personalbest_faval=TT;
[globalbest_faval(1),i]=min(personalbest_faval);
globalbest_x=personalbest_x(i,:);
globalbest_route=ROUT{
i};
ff(1)=globalbest_faval(1);
k=2;
w
route=globalbest_route;
[minkl,p]=min(globalbest_faval);
xbest=globalbest_x(p,:);
LENROUT=length(route);
disp(['Alpha 表征信息素重要程度的参数=',num2str(xbest(1))]);
disp(['Beta 表征启发式因子重要程度的参数=',num2str(xbest(2))]);
disp(['Rho 信息素蒸发系数=',num2str(xbest(3))]);
disp(sprintf('Shortroad is: %s',num2str(route)));
disp(sprintf('Mininum is: %d',minkl));
figure(2)
% set(gcf,'color','white');
plot(1:length(ff),ff)
title('粒子群蚁群算法收敛曲线变化趋势')
xlabel('迭代次数');
ylabel('适应度值');
first_address = [
100,10
150,10
170,30
180,20
200,10
200,100
200,150
190,180
180,200
160,200
170,180
140,180
135,200
130,180
100,200
125,100
200,300
10,300
10,200
10,180
10,100
10,10
50,30
100,10
];%first_address表示测试数据中的节点坐标
SumOfCity = size(first_address,1);%节点个数,实际返回行数,即为节点个数
length_address =0.*ones(SumOfCity,SumOfCity);%length_address表示两两节点间的距离,初始设定10000,可以设定无穷大,表示不相连
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
length_address(1,2)=194.0;%表示节点1和节点2的COST值
length_address(2,3)=64.9;%
length_address(3,4)=20.0;%
length_address(4,5)=18.6;
length_address(2,5)=72.4;
length_address(5,6)=123.4;
length_address(6,7)=35.5;
length_address(7,8)=32.4;
length_address(8,9)=45.0;
length_address(9,10)=51.4;
length_address(10,13)=271.2;
length_address(13,15)=100.0;
length_address(15,19)=189.5;
length_address(8,11)=293.9;
length_address(11,12)=100.0;
length_address(12,14)=4.1;
length_address(14,20)=192.9;
length_address(14,15)=86.8;
length_address(10,12)=87.0;
length_address(6,16)=600.0;
length_address(16,21)=279.3;
length_address(7,17)=92.0;
length_address(17,18)=464.9;
length_address(18,19)=46.0;
length_address(19,20)=44.6;
length_address(20,21)=67.5;
length_address(21,22)=230.3;
length_address(22,23)=102.9;
length_address(23,24)=126.9;
length_address(22,24)=262.5;
for n=1:size(first_address)
for m=1:size(first_address)
if length_address(n,m)~=0
length_address(m,n)=length_address(n,m); %对称矩阵
end
end
end
MM=size(length_address,1);
% 画出节点分布图形
figure;
grid on;
hold on;
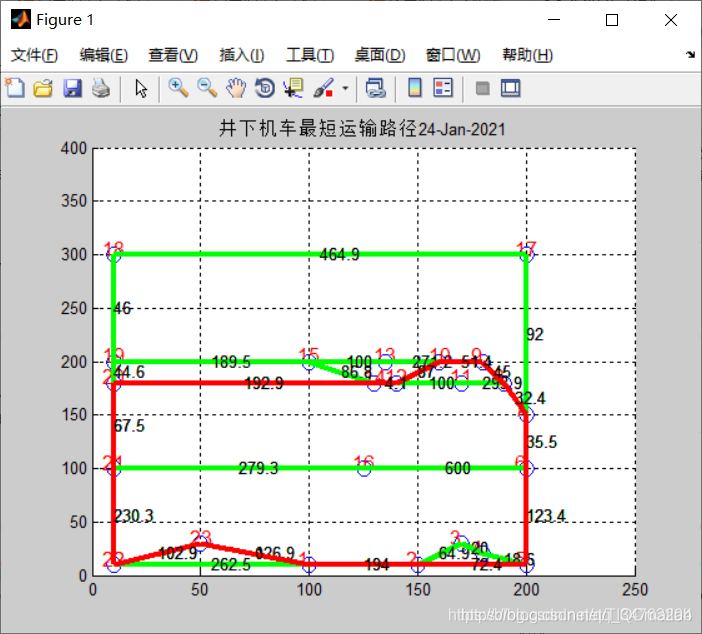
title (strcat('井下机车最短运输路径',date))
%title( sprintf('井下机车最短运输路径 Event occured at %s',datestr (date ,15)));
for i=1:MM-1
plot(first_address(i,1),first_address(i,2),'bo','MarkerSize',10);
str=num2str(i);
text(first_address(i,1)-5,first_address(i,2)+5,str,'Color','red','FontSize',12);
end
% m=length(route);
for i=1:LENROUT
plot(first_address(route(i),1),first_address(route(i),2),'MarkerSize',10,'MarkerEdgeColor','k','MarkerFaceColor',[0.5,0.5,0.5]) ;
hold on;
end
for i=1:MM
for j=1:MM
if(length_address(i,j)~=0)
line([first_address(i,1),first_address(j,1)],[first_address(i,2),first_address(j,2)],'Color','g','LineWidth',3);%划线
text((first_address(i,1)+first_address(j,1))/2,(first_address(i,2)+first_address(j,2))/2,num2str(length_address(i,j)));%标注线段距离
end
end
end
%% 最短路径
for p=1:LENROUT-1
if(route(p+1)~=24)
line([first_address(route(p),1),first_address(route(p+1),1)],[first_address(route(p),2),first_address(route(p+1),2)],'Color','r','LineWidth',3);%划线
text((first_address(route(p),1)+first_address(route(p+1),1))/2,(first_address(route(p),2)+first_address(route(p+1),2))/2,num2str(length_address(route(p),route(p+1))));%标注线段距离
else
line([first_address(route(p),1),first_address(1,1)],[first_address(route(p),2),first_address(1,2)],'Color','r','LineWidth',3);%划线
text((first_address(route(p),1)+first_address(1,1))/2,(first_address(route(p),2)+first_address(1,2))/2,num2str(length_address(route(p),route(p+1))));%标注线段距离
end
end
axis([0 250 0 400])
% 图形显示最优及平均函数值变化趋势
% figure(2);
% plot( minPL);
% title('迭代优化过程');
% xlabel('迭代次数');
% ylabel('Cost');
% hold on;
三、运行结果
四、备注
完整代码或者代写添加QQ2449341593
往期回顾>>>>>>
【VRP】基于matlab遗传算法的带时间窗的车辆路径问题【含Matlab源码 002期】
【路径规划】基于matlab A*算法解决三维路径规划问题【含Matlab源码 003期】
【路径规划】基于matlab人工蜂群的路径规划【含Matlab源码 004期】
【路径规划】基于matlab蚁群求解多旅行商MTSP问题【含Matlab源码 005期】
【路径规划】基于matlab蚁群算法的无人机路径规划【含Matlab源码 008期】
【路径规划】基于matlab遗传算法求解多VRP问题【含Matlab源码 010期】
【路径规划】基于matlab遗传算法的多中心VRP求解【含Matlab源码 011期】
【路径规划】基于matlab粒子群的三维无人机路径规划【含Matlab源码 015期】
【路径规划】基于matlab采用遗传算法编制多物流中心的开放式车辆路径问题【含Matlab源码 017期】
【路径规划】基于matlab粒子群之机器人栅格路径规划【含Matlab源码 018期】
【路径规划】基于matlab蚁群算法求解最短路径【含Matlab源码 019期】
【路径规划】基于matlab 免疫算法之物流中心选址问题【含Matlab源码 020期】
【路径规划】基于matlab人工蜂群的无人机三维路径规划【含Matlab源码 021期】
【路径规划】基于matalb栅格地图——遗传算法的机器人最优路径规划【含Matlab源码 022期】
【路径规划】基于matlab栅格地图——遗传算法的机器人最优路径规划【含Matlab源码 027期】
【路径规划】基于matlab蚁群的多无人机攻击调度【含Matlab源码 034期】
【路径规划】基于matlab蚁群的三维路径规划【含matlab源码 043期】