基于蓝桥杯物联网的开发技术省赛教程
一、入门篇
1、 蓝桥杯物联网开发 入门篇① 认识LoRa终端
2、 蓝桥杯物联网开发 入门篇② 开发环境搭建
3、 蓝桥杯物联网开发 入门篇③ 利用CubeMX配置一个MDK工程
4、 蓝桥杯物联网开发 入门篇④ 烧录程序
二、基础篇
1、 蓝桥杯物联网开发 基础篇① GPIO输出
2、 蓝桥杯物联网开发 基础篇② GPIO输入
3、 蓝桥杯物联网开发 基础篇③ 滴答定时器
4、 蓝桥杯物联网开发 基础篇④ 时钟选择
5、蓝桥杯物联网开发 基础篇⑤ 外部中断
6、蓝桥杯物联网开发 基础篇⑥ 串口发送
7、蓝桥杯物联网开发 基础篇⑦ 串口接收
前言:
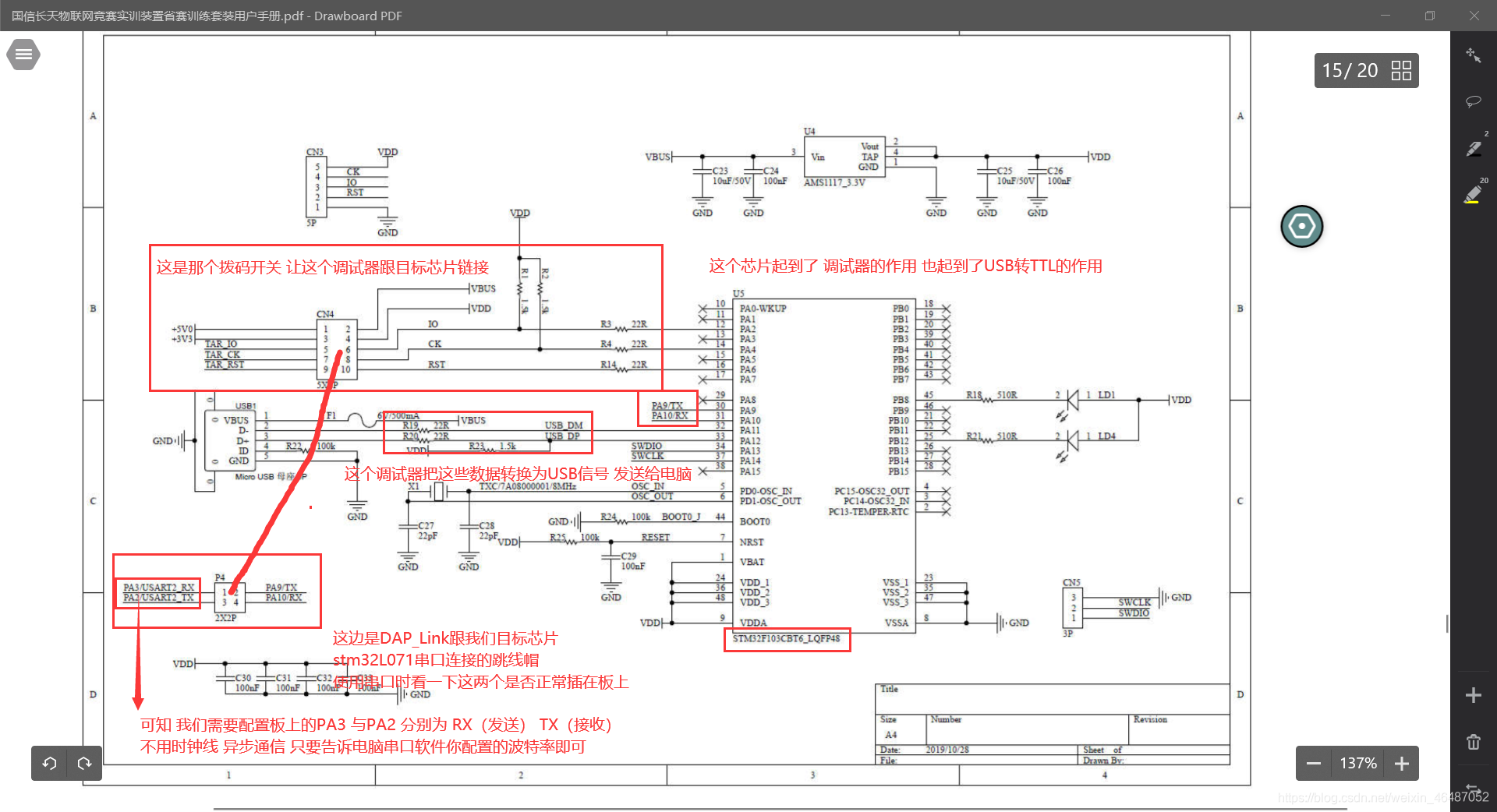
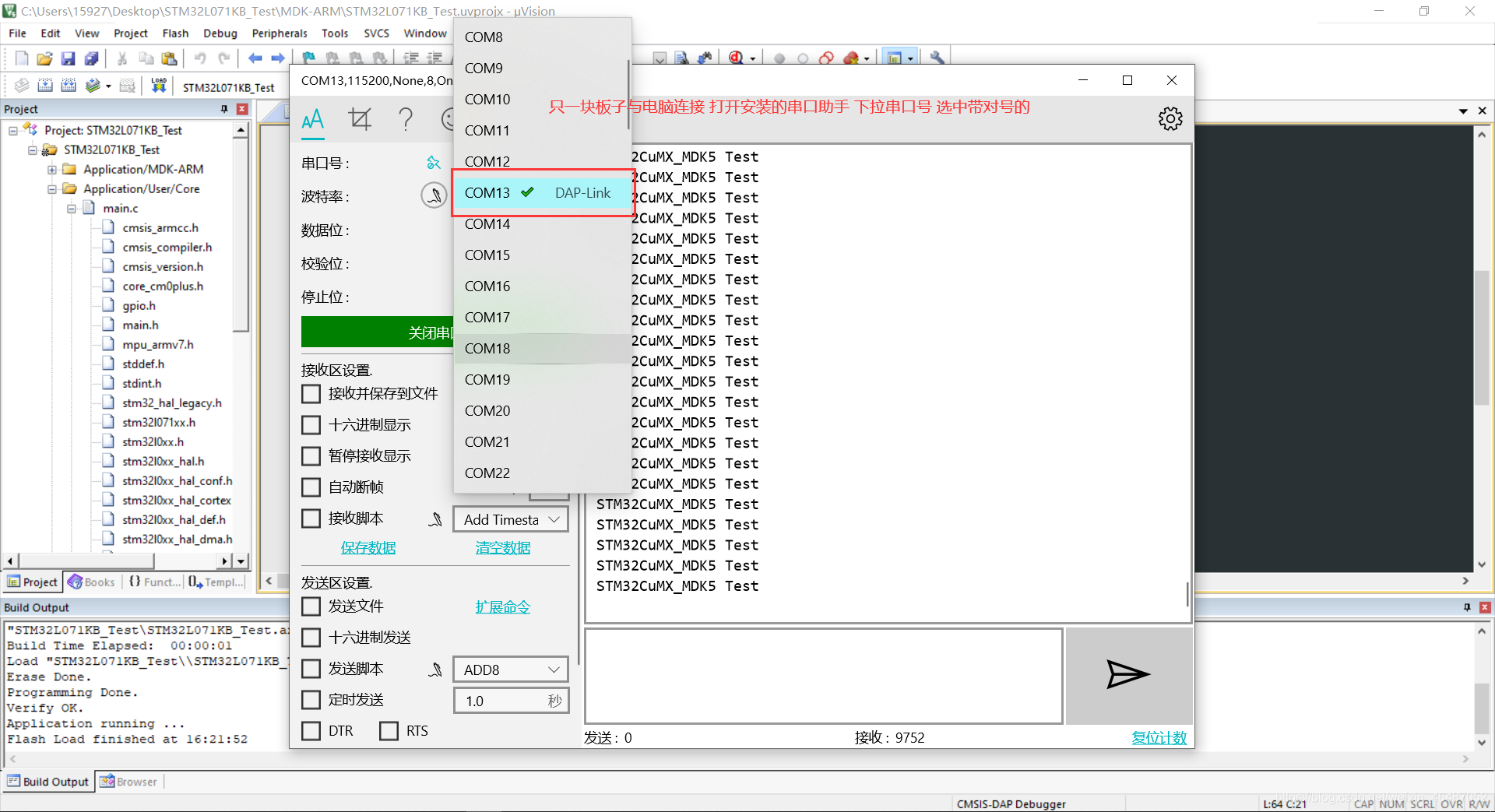
这一章我们主要了解用户手册 以保证比赛过程中可以轻车熟路 条提高效率 本小节会讲如何给LoRa终端主控芯片STM32L071KB将stm32芯片通过DAP_Link的虚拟串口TTL电平信号与电脑USB接口的232电平相互转换实现通信(板载的stm32f103c8芯片实现了这个功能 方便了我们调试)我们前期的一些调试工作主要依靠串口 将单点机的运行状态通过电脑窗口直观表现
用户手册在这里
链接:https://pan.baidu.com/s/11-Dg2BHrhvzXbe7NAO6aOA
提取码:9x5w
1、板载串口简介
串口通讯
(Serial Communication)是一种设备间非常常用的串行通讯方式,因为它简单便捷,因此大部分电子设备都支持该通讯方式,其通讯协议可分层为协议层和物理层。物理层规定通信协议中具有机械、电子功能的特性,从而确保原始数据在物理媒体的传播;协议层主要规定通讯逻辑,统一双方的数据打包、解包标准。一般只使用 RXD、TXD 以及 GND 三条信号线,直接传输数据信号,通过调整Boot0引脚的高低电平还可以实现为stm32烧录程序。由于该教程仅做入门实验使用 不要求数据稳定性 不会涉及较复杂的中断以及CRC来防止输出丢包和数据出错(小概率事件)详细了解寄存器的话可以参看其他博主
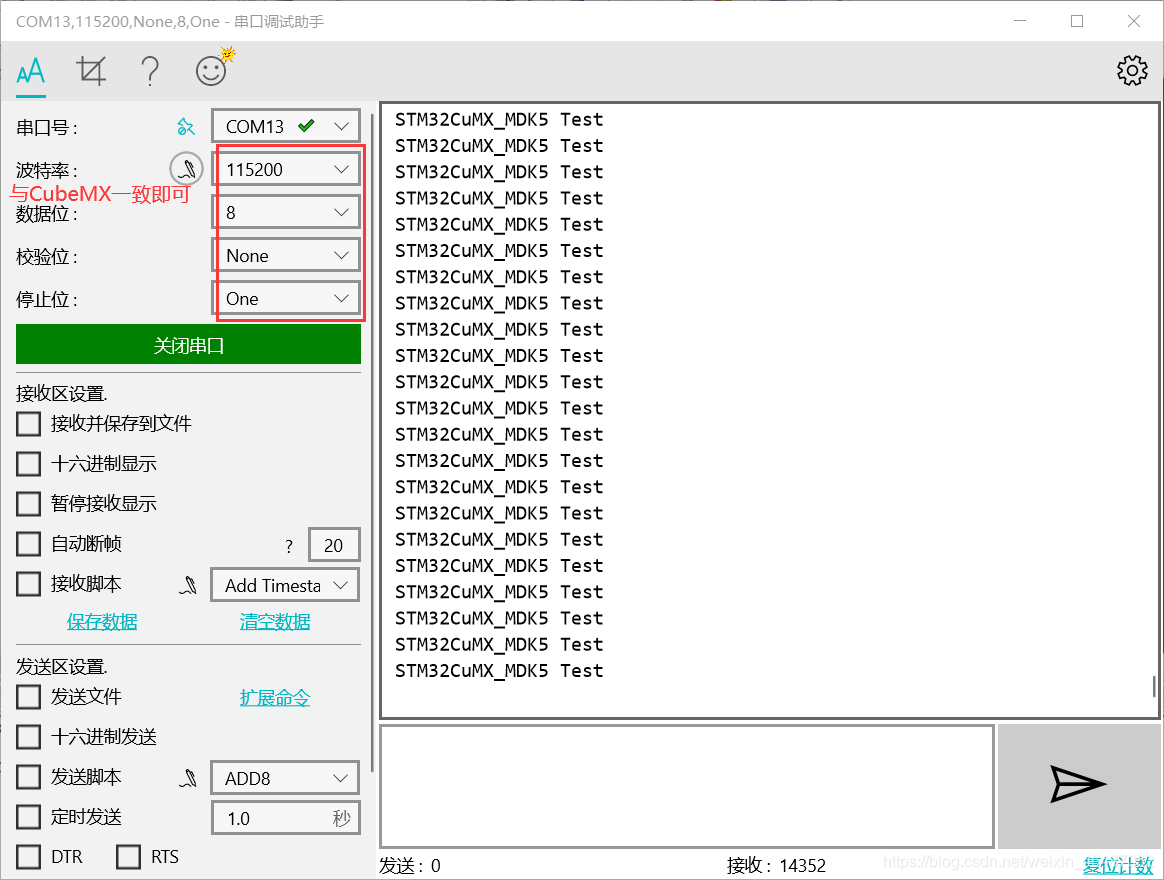
波特率:发送二进制数据位的速率,习惯上用 baud 表示,即我们发送一位二进制数据的持续时间=1/baud。(不需要深究)
stm32串口详解这位博主介绍的比较简明
硬件配置
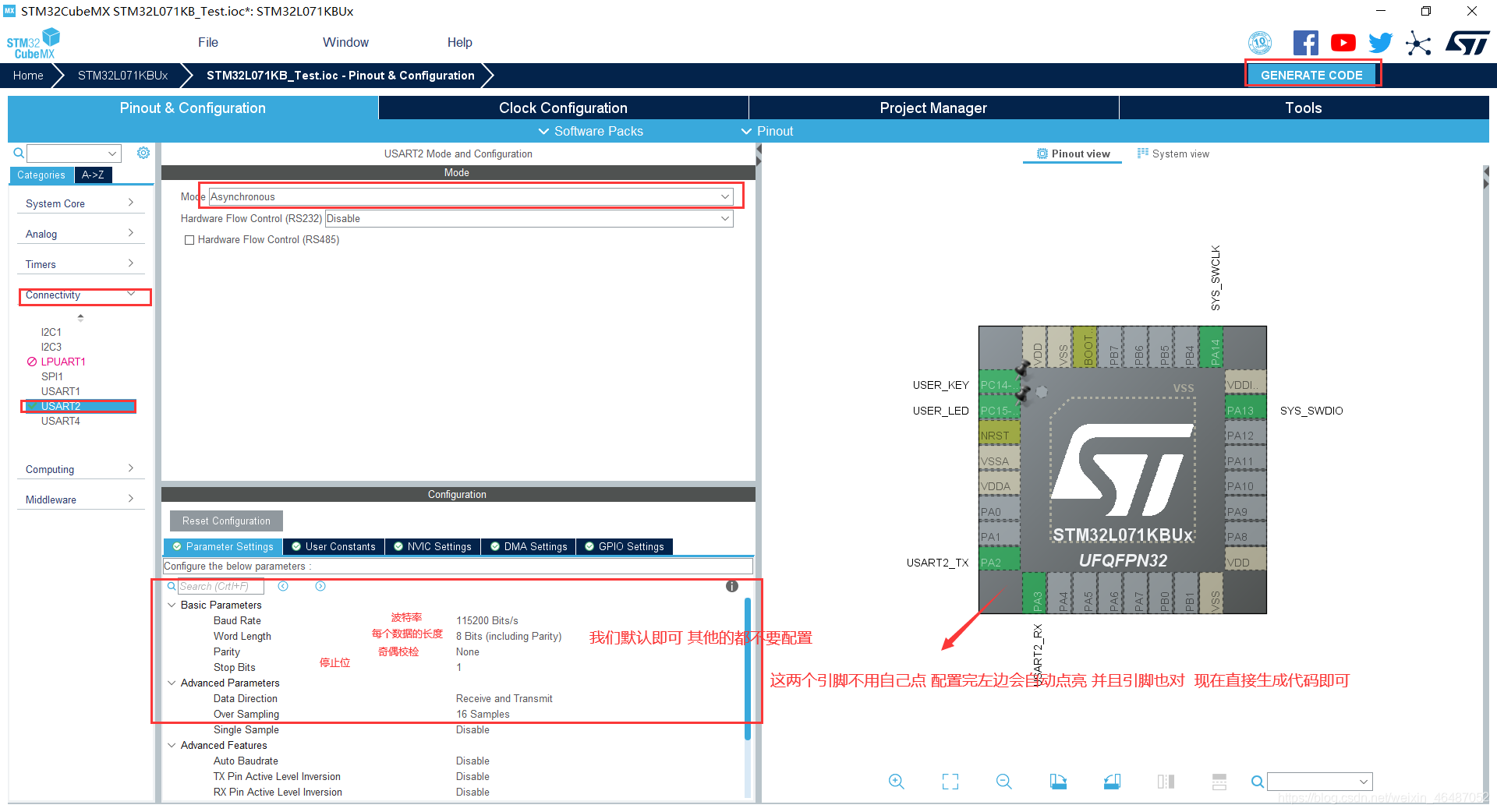
2、STM32CubeMX配置
本小节继续使用之前生成的工程即可
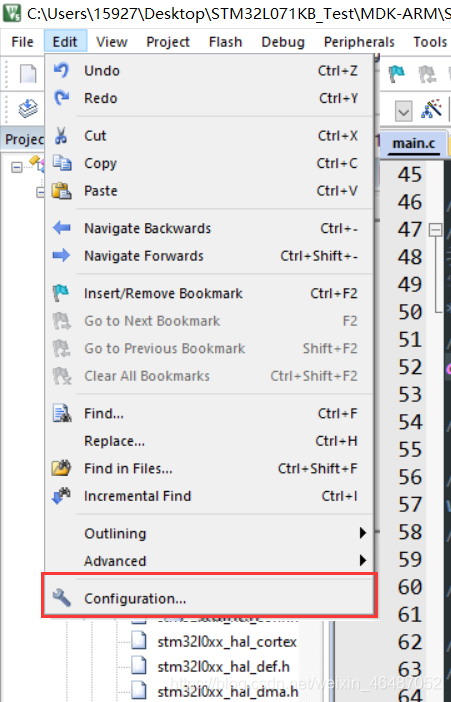
3、MDK5主要代码讲解
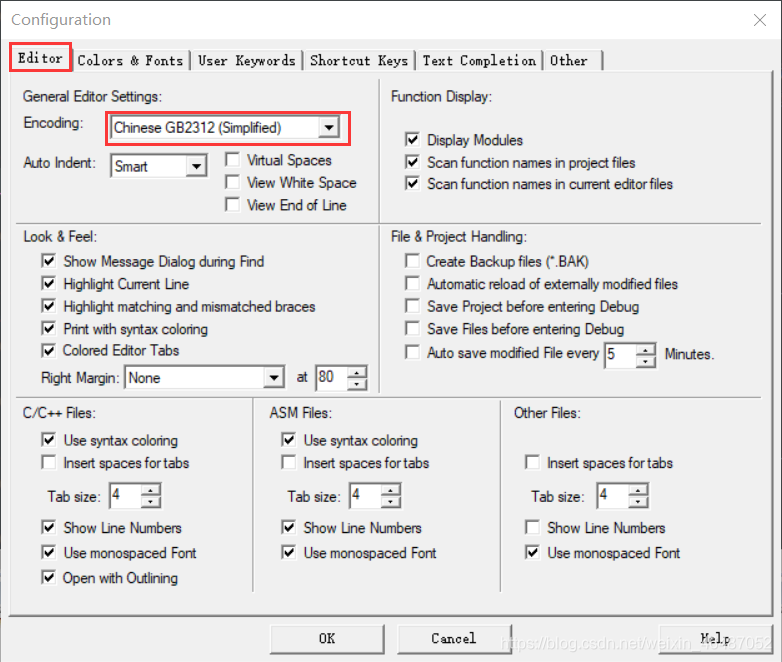
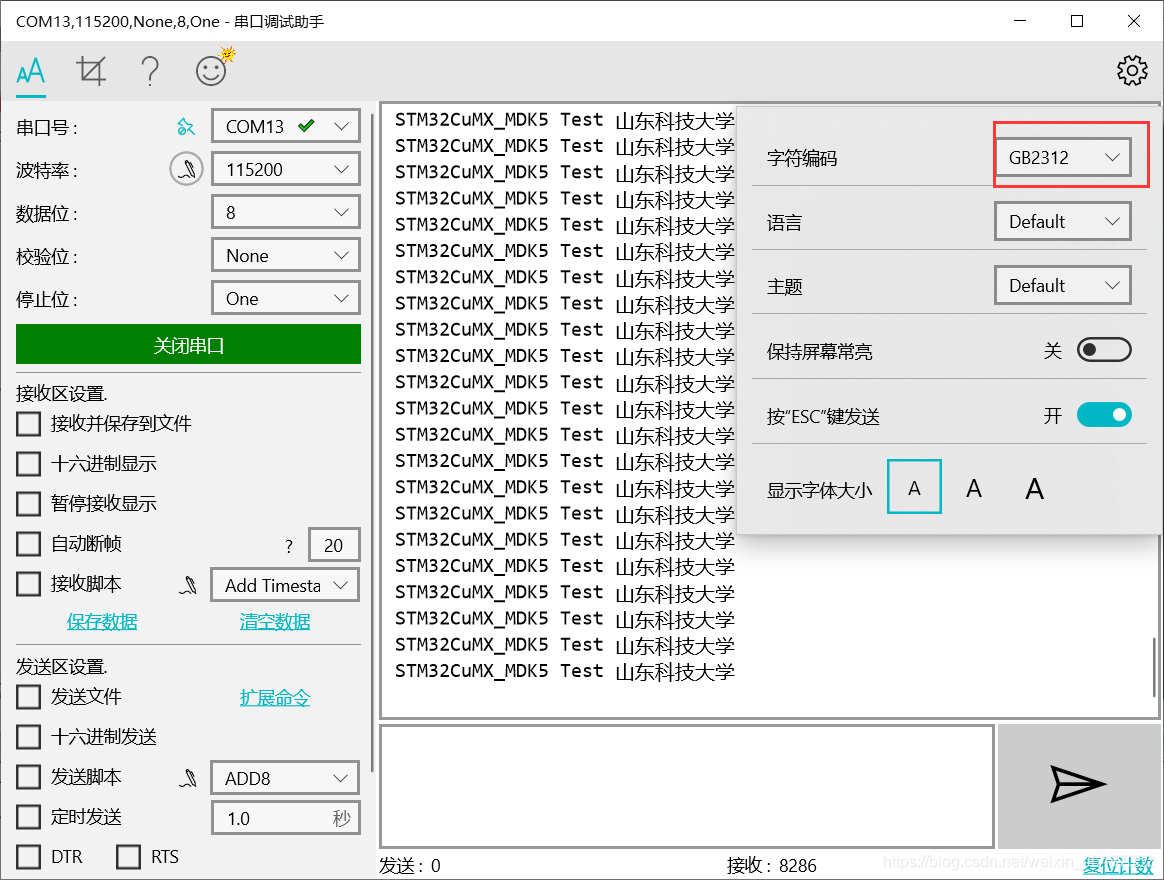
为了使编译后的代码发送给电脑不会乱码 MDK5根串口调试软件需要统一编码格式 这里统一用GB2312
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/*
我们定义一个要发送的字符串或者数组 注释上句 打开下一句即可 为了便于调试 定义为数组即可
字符串结尾加上两个ASCII码 \r\n 注意是从左斜杠 来作为显示换行符号 便于也读调试信息
*/
//char * Send_Data = "STM32CuMX_MDK5 Test \r\n";
char Send_Data[] = "STM32CuMX_MDK5 Test 山东科技大学 \r\n";
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/*
发送我们主要使用这个函数 不知道参数怎么填写 我们就F12跳转到函数定义 然后再跳转到参数定义
里面一般会有各个参数可以填写的值
这个函数第一个参数是你配置的哪个串口句柄 "usart.h"文件里面会有
第二个参数是你定义的数组字符串
第三个是要发送的数据量 8个bit 一个char型为一个数据
第四个是要发送超时时间 如果超过了超时时间还是没能把数据全部转移到发送寄存器就会自动退出 发送也会中断 这个配置的大一点就可以
*/
HAL_UART_Transmit(&huart2, (uint8_t *)Send_Data, sizeof(Send_Data), 0XFFFFFFFF);
HAL_Delay(1000);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {
0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {
0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {
0};
/** Configure the main internal regulator output voltage
*/
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLLMUL_4;
RCC_OscInitStruct.PLL.PLLDIV = RCC_PLLDIV_2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART2;
PeriphClkInit.Usart2ClockSelection = RCC_USART2CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
4、实验现象
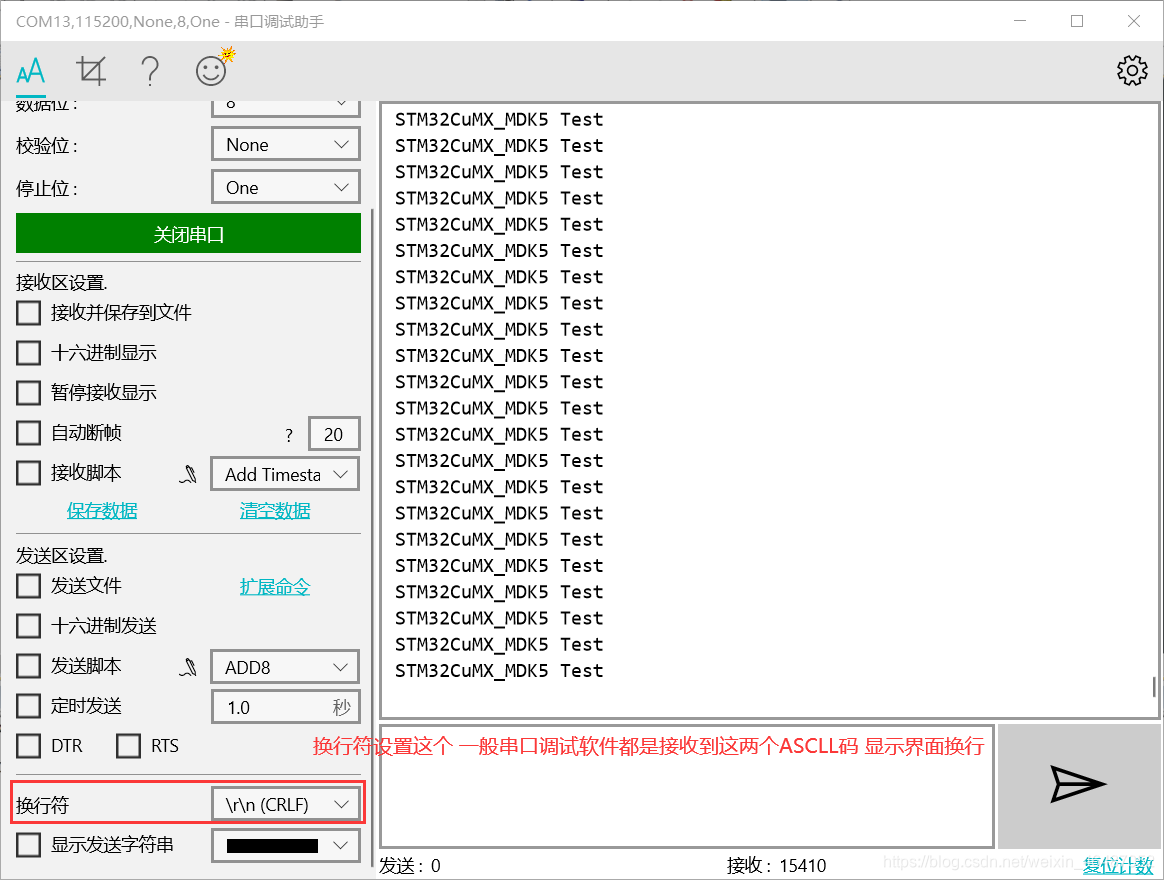
配置没有问题 点击打开串口 会每一秒接收我们写的字符串 也可以是汉字 自己定义字符串即可