前言
鉴于前几篇Arduino案例博文都都是写完整个操作过程及现象才发布,中间可能是花了几天半个月的业余时间来写,最长的好像还用了一年时间才补完(磁悬浮emmmm…),所以这次案例也稍微有点复杂,博主决定分成几篇博文来说明,至少确保你们能看明白,因为博主一直以案例教学的方式在写博客嘛 ~ ~ ~ 啊哈哈哈哈哈哈 ~ ~ ~
一、案例概述
1.1 案例效果演示
智能巡防小车可能按里面意思去理解每个人理解的都不一样,先看看小车的演示效果吧(emmm为了做做个动图折腾好久…上传大小限制,将就这看吧)

此处小车做的是OpenMV巡线,没错,用OpenMV做黑线方向的图像坐标获取与判断,随后通过Arduino来控制小车的前进转向
动图可能看不清车头的OpenMV,附上高清图一张
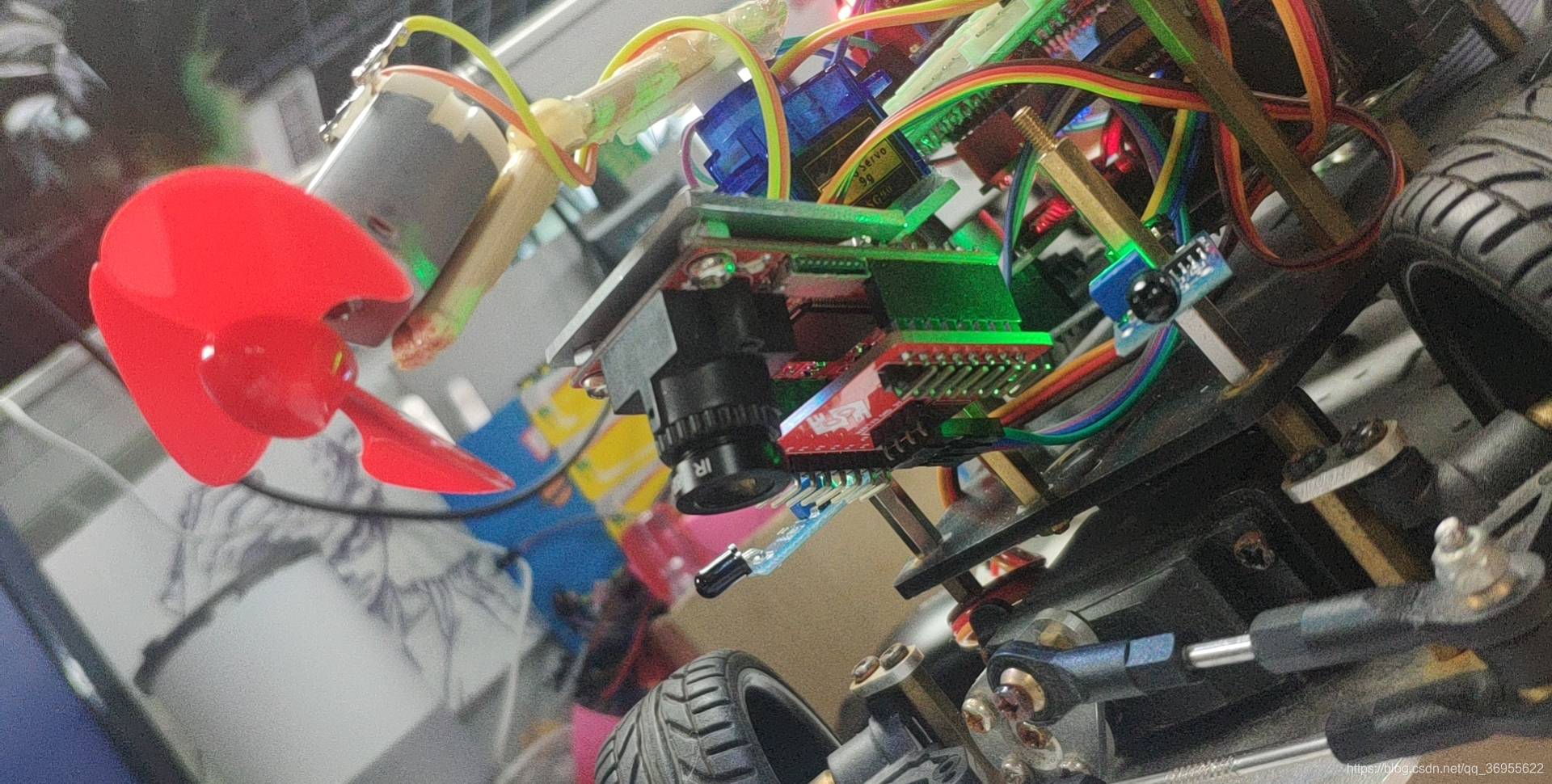
聪明的人除了发现了小车车头装的OpenMV外,还看到了上面有个小风扇,对的,巡防小车的最终目的就是为了一边做巡线,一边检测火源并进行风扇灭火,上图

另一个

1.2 案例所需材料准备
比较主要的模块如下:
- OpenMV模块一个
- Arduino UNO控制板一块(也可用UNO+ESP8266集成板)
- 4WD扩展板一块
- 编码电机驱动板一块
- 舵机转向小车一台(带编码电机)
- 继电器模块一个
- 直流电机一个(带扇叶)
- 锂电池一块(12.6V)
- 杜邦线若干
下一篇将开始讲智能巡防小车的OpenMV图像(黑线)识别程序编程调试