**前情提要:刚安装完Ubuntu 20.04,还未安装任何内容**
《教程 Re:Zero ROS (一) —— 安装系统,了解ROS》
https://blog.csdn.net/Lovely_him/article/details/107734103
教程 Re:Zero ROS (二)
—— 准备工作,安装基础工具
1. 错误“没有可用的软件包”
-
我打算安装“aptitude”:
sudo apt-get install aptitude -
提示错误:
-
解决方法:
sudo apt-get update
《没有可用的软件包××,但是它被其他的软件包引用了——解决方法》
https://blog.csdn.net/weixin_39467231/article/details/82724698
- 安装完“update”后,安装”aptitude“
2.开始一系列安装
《安装Ubuntu 20.04后要做的事》
https://blog.csdn.net/skykingf/article/details/45267517
sudo aptitude safe-upgrade先更新一遍软件
sudo aptitude install vim安装神器vim(虽然不怎么会用)
sudo apt-get install tree安装tree工具
sudo apt-get install python3-pippython相关工具,之后要用到
sudo apt-get install guake安装终端工具1,快捷终端
sudo apt-get install p7zip安装解压软件
sudo apt-get install terminator安装最强终端工具2,最棒的是全中文
附上两篇终端工具的使用简介:
《Terminator的安装和配置(颜色和字体)》
https://blog.csdn.net/zhangkzz/article/details/90524066
《Guake Terminal ── linux下完美帅气的终端》
https://blog.csdn.net/u013634961/article/details/40048199
3.添加下载源
- 安装工具时可能会需要添加下载源;
- 有两种方法:一种是命令行操作,就是使用vim或是记事本打开下载源的配置文件(略过)。第二种是图形界面操作,打开"软件与更新"- “下载自”-“其他站点…(选择下载服务器)”-“选择最佳服务器”。请多刷新几次,把下载源刷到是中国目录下的,一般是一次就可以了。

- 如果是更新个别下载源,“其他软件”-“其他软件”-“添加”:
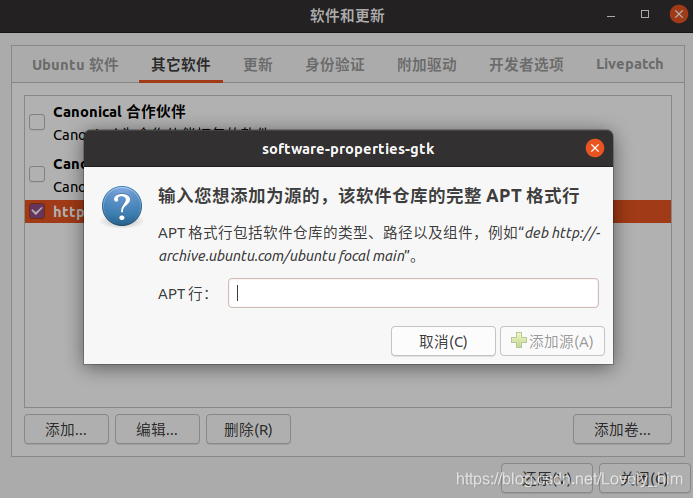
- 假如我要添加下载源则填:
deb http://archive.ubuntukylin.com:10006/ubuntukylin trusty main - 也可以使用指令添加单个下载源,不过有很多种,这里不列举了。
- 另外,一般修改了“软件和更新“里的东西都会弹出一个框。别点更新,点一次卡死一次。
4.错误:“没有公钥”
- 如果添加了个别源,可能需要添加“公钥”,如果缺少在更新软件列表时会报错:
- 解决方法:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys <公钥>
《更新linux时候提示无法“由于没有公钥,无法验证下列签名 ***”的解决方案》
https://blog.csdn.net/loovejava/article/details/21837935
5.使用deb文件安装软件
刚刚想用apt指令安装搜狗输入法和wps,在20.04版本下都找不到,可能我的源不对?
之后我又自己尝试了一下,不是使用指令安装,上找到了搜狗输入官网下载deb文件。尝试安装时,发现其依赖于软件包“fcitx-frontend-qt4”。但是在20.04上搜索只有“fcitx-frontend-qt5”,无法安装“qt”……我强行安装失败,“aptitude”检查时建议方案是卸载”搜狗“,好吧放弃了。
另外,deb文件在Ubuntu上也可以直接双击打开,使用”软件“功能安装。不过感觉没终端安装好,因为不能看到反馈信息,成功了也不知道安装了什么,失败了也不知道原因。
- 系统自带的中文输入法真的是太难用了,我决定再csdn一下,找到ubuntu下还有百度输入法 。是使用deb安装的,也顺便补充一下deb的安装流程。
1.《在Ubuntu 20.04中安装常用的工具2 (百度输入法, WPS, Peek)》
1.https://blog.csdn.net/feimeng116/article/details/106317563
2.《Ubuntu 20.04安装百度拼音输入法》
2.https://blog.csdn.net/Thanlon/article/details/107008050
- 跟着流程走安装成功,无报错。
#如果第一次使用peek报错,具体如下:
Could not start GNOME Shell recorder.
Missing codec or another active screen recording using org.gnome.Shell.Screencast?
Please see the FAQ at https://github.com/phw/peek#what-is-the-cause-for-could-not-start-gnome-shell-recorder-errors
#打开任务管理器,把一个叫peek的正在运行的进程“杀死”。之后就可以正常使用了。
在这个帖子里有给出一个搜狗输入法的下载源,但是我加载失败,所以还是没安装上
《ubuntu20.04机器学习及日常使用环境搭建》
https://blog.csdn.net/Archger/article/details/105980372
6.使用git下载
- 上面提到的deb文件一般也可以在github上下载,在命令行输入代码即可。有听说下载慢点,但是我感觉很快,只要你的源没有问题,而且下载中断后可以继续下载。。如果发现速度低于mb/s,打开“软件和更新”,更新源。之后很多源代码都需要从github下载,早用早习惯,而且越用越觉功能强大。
- 安装git :
sudo apt install git - 从git下载:
git clone <网址>
《gitHub下载项目方法》
https://blog.csdn.net/u010886217/article/details/82904145
《GitHub下载项目并运行》
https://blog.csdn.net/Jasmines1993/article/details/79757324
7.安装ROS IDE
- 官方介绍页面中共介绍了15个IDE,其中"Vim"和”Qt(Qt Creator)"之前在安装工具时就一起顺带安装了。
- 如果之前学过python,应该还知道“Anaconda”和“PyCharm (community edition)”,还有“Eclipse”、“CLion”等。
- 还有“RoboWare Studio”和“Visual Studio Code (VSCode)”,如果不想接触新IDE软件,可以直接用VSCode,操作和界面和RWStudio基本一致。
《ROS Wiki - IDE》页面介绍
http://wiki.ros.org/IDEs
- 请记住这个官方wiki网站,后期ros的资料基本就上那找。
- 在Ubuntu20.04版本下“RoboWare Studio”不能使用。现象为:“打开软件后无反应,打开软件也没有页面弹出或是报错之类的。若有知道解决方法的,望分享。
- 不是Ubuntu20.04版本的可放心下载“RoboWare”,若是20.04版本可考虑安装原版“VS Code”,原版也有ros的插件,虽然不及“Roboware”对ROS那么有针对性的功能,但是还能用。
《RoboWare Studio安装教程》
https://blog.csdn.net/zhuiqiuzhuoyue583/article/details/84536406
《RoboWare Studio的安装》
https://blog.csdn.net/JIEJINQUANIL/article/details/102572722
- 其他IDE没怎么用过,“Vim”、“Anaconda”、“PyCharm (community edition)”一般用来当记事本.”Qt(Qt Creator)"在Ubuntu20.04版本中没有对应的ROS版本。qt和vs类似,都是多平台多版本。
- 若要安装“VS Code”,请用指令安装。虽然在Ubuntu系统商店内可以安装,但是有不能切换中文输入法的bug。
sudo aptitude install visual-studio-code
注意!
- 根据教程使用pip时出了问题,可之前安装小工具时我就安装了pip啊?
- 后来发现原来是20.04版本下,pip被分为了新旧几个版本,我安装的是pip3,使用pip指令时,填的时候就需要多填一个3。例如:
pip3 --version。同理,如果要使用“pip2”或“python2/3”的话也是如此。
《Ubuntu 20.04LTS下安装pip》
https://blog.csdn.net/qq_29627051/article/details/106092584
- 这也是个问题,在使用20.04版本时,很多教程指令或名字都对不上。唯有熟用aptitude等工具 查找可能相似的代替。
8.安装ROS
- 准备工作做得差不多了,开始安装ros。注意不同Ubuntu版本安装的ros版本也不一样。
《unbuntu20.04 安装ROS neotic》
https://blog.csdn.net/solo_egg/article/details/107152801
《ubuntu 16.04下安裝和配置ros》
https://blog.csdn.net/jinking01/article/details/79387639
- 如果前面的准备工作做足了,那么这个安装教程应该也是一路复制粘贴顺下来没有错误。
- 剩下的就是耐心的等待安装结束了,注意,如果中间因为链接超时中断了。别怕,继续执行上一条下载指令即可,系统会继续之前的进度开始下载。如果你觉得速度太慢了,也可以
Ctrl + C手动终止下载 (不推荐),然后打开“软件和更新”更新源后再开始继续下载。不过部分软件包是特别慢,所以还是请耐心点。 
- 下载了近2个小时终于到达99%了,但是快下载完毕时突然报错超时。别怕,按照提示输入
sudo apt-get update,然后重新输入上一条下载命令,就会自动恢复进度,继续下载。下载完成会自动安装。 
- 最后能控制冒出的小海龟了,恭喜你,成功安装了ros基础包。
9.开始学习
- 这一篇,把,一台“干干净净”的,Ubuntu系统的,“必备”工具的,安装流程走了一遍。
- 下一篇,开始下载ros工程开始学习,我将会把,一个完整的,智能小车工程的,编写流程也走一遍。直接上手,从看懂工程、会调用库开始。
《教程 Re:Zero ROS (三) —— 新建工程、订阅发布话题》
https://blog.csdn.net/Lovely_him/article/details/107751902
-
/*********目录*********/