说明
本次以ubuntu16.04+ros kinetic为例。
ROS和Ubuntu都是存在不同版本的,而且ROS比较傲娇,每一个版本都对应着一个或两个ubuntu版本。安装ros前先要找好自己ubuntu版本对应的ros,不然安装会有问题,把下面所有kinetic换成你自己的ros版本。下面图片版本可以参考自己适合哪一款,20版本也出了,此处没有列出。
博主虚拟机和双系统都安装了ros,过程是一样的,有什么问题欢迎评论留言,博主会尽自己所能帮助解决问题。ps:博主也是小白,深奥问题解答不了。。。。


1. 配置Ubuntu软件仓库(configure your ubuntu repositories)
配置Ubuntu 软件仓库(repositories) 安装模式(开启"restricted"、“universe” 和 "multiverse"这三种)

2.
(1)添加源(setup your sources.list)
我们要设置电脑可以从 packages.ros.org 接收软件,新建一个terminal(控制台):ctrl+alt+t,输入以下命令
sudo sh -c 'echo ''deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc)main''> /etc/apt/sources.list.d/ros-latest.list'
(2)添加秘钥(set up your keys)
gpg: 冲突的指令
如果在连接密钥服务器时遇到了问题,可以尝试在上面的命令中用 hkp://pgp.mit.edu:80 或 hkp://keyserver.ubuntu.com:80 来替换。
3. 进行安装(installation)
(1)从服务器获取全部可用的、最新的软件包列表,并缓存到本地电脑
sudo apt-get update
同一版ros也有很多不同的类型,每个类行所包含的插件不同,建议下载ros全家桶,这样后面操作就不用再缺很多东西(但还是缺。。。。。)
sudo apt-get install ros-kinetic-desktop-full
这一步根据你源的不同下载速度不一样,校园网建议使用,清华,中科院等校园源,家庭等可以使用阿里等源
(2)安装完成后,可以使用下条命令查看可用的软件包,其实还不能用,查看一下给自己走到这一步的一个小鼓励。
apt-cache search ros-kinetic
4. 初始化 rosdep(initialize rosdep)
sudo rosdep init
rosdep update
5. 环境配置(environment setup)
echo ''source /opt/ros/kinetic/setup.bash'' >> ~/.bashrc
source ~/.bashrc
主要就是将这句写入bashrc文件中,以后再每个终端都会有这个环境
6. 构建依赖项(dependencies for building packages)
rosinstall 是一个经常使用的命令行工具,可以从一个命令下载许多个ROS包的源树。
要安装这个工具和其他构建ROS包的依赖项
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool buid-essential
到此处没出现什么问题的话就应该安装成功了。
可以重启一下系统,在进行下面操作:
1)在终端启动ROS MASTER:
roscore
显示如图
(2)重新打开一个终端,我们要启动小海龟仿真器
rosrun turtlesim turtlesim_node
(3)再打开一个终端。。。。
rosrun turtlesim turtle_teleop_key
此命令为键盘控制,小海龟可以动了。

此处光标一定要在键盘控制的那个终端上,在用上下左右控制,不严王八不动!!!
(4)可以查看一下节点关系
rosrun rqt_graph rqt_graph
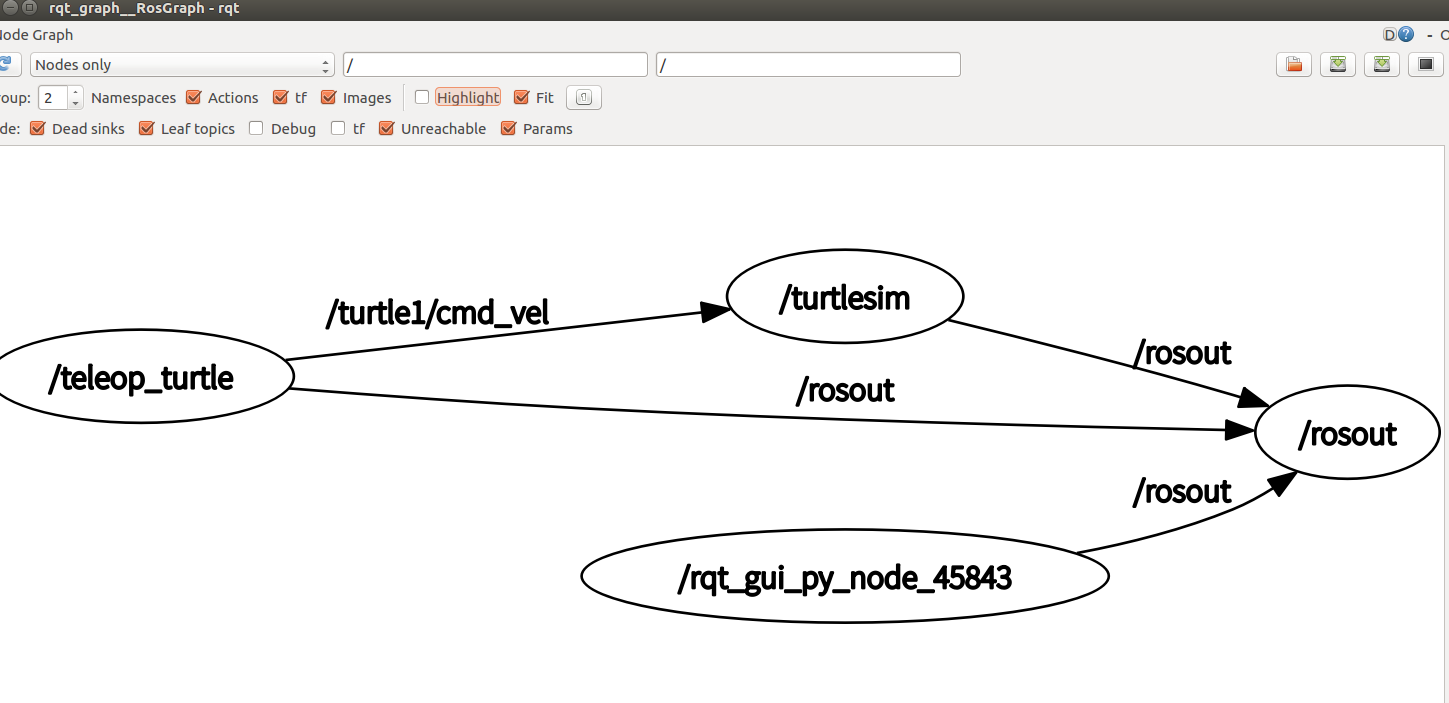
到此为止恭喜你安装成功!!
有什么问题欢迎大家指正,一起探讨学习。
推荐参考网站:(1)http://wiki.ros.org/kinetic/Installation/Ubuntu
博主ros初识入门传送:
ros初识入门(一)整体认知介绍
~~未完待续 ~~
若有侵权联系速删