文章目录
一、简介
为了实现后续树莓派接收霍尔传感器信号进而实现亮灯,而实现的一个准备工作,强烈建议大家以后买元器件尽量买双份,因为有时候店铺发的器件是坏的,而且还不一定能正确提供对应的资料,重新补发,又需要耽误一两天的时间,所以资金充足的情况下,强烈建议直接买双份。
二、硬件准备
1、树莓派4B * 1
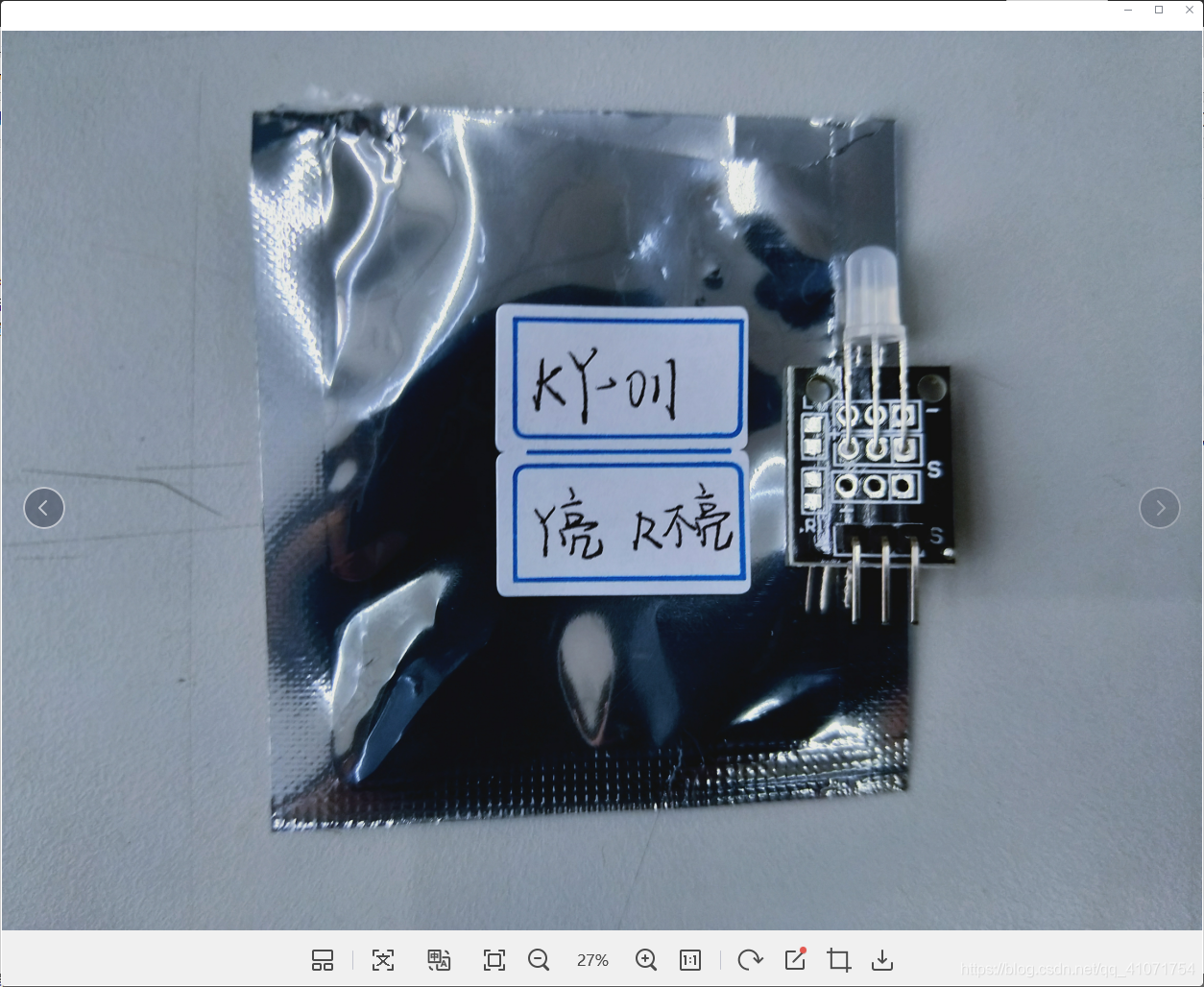
2、KY-011双色LED模块 * 2
下图就是我买到的坏掉了ky-011,ky-011分为红黄两色,这个坏掉的红灯不亮了,黄灯还是可以正常使用的。
接线引脚
- (图中左侧)标注‘-’的管脚接GND,中间的管脚接数字IO,(图中右侧)标注"S"的管脚也接数字IO
- 当中间管脚为高电平,则LED亮灯为红色(R)。
- 当S管脚为高电平,则LED亮灯为黄色(Y)。
| Raspberry Pi | KY-011 |
|---|---|
| Pin 6 | GND |
| Pin 11 | Y |
| Pin 13 | R |
三、软件准备
# -*- coding: utf-8 -*-
import RPi.GPIO as GPIO
import time
# BOARD编号方式,基于插座引脚编号
GPIO.setmode(GPIO.BOARD)
# 输出模式
GPIO.setup(11, GPIO.OUT)
GPIO.setup(13, GPIO.OUT)
while True:
//熄灭
GPIO.output(11, GPIO.LOW)
GPIO.output(13, GPIO.LOW)
time.sleep(1)
//黄灯亮
GPIO.output(11, GPIO.HIGH)
GPIO.output(13, GPIO.LOW)
time.sleep(1)
//红灯亮
GPIO.output(11, GPIO.LOW)
GPIO.output(13, GPIO.HIGH)
time.sleep(1)
//红灯亮 + 黄灯亮 (形成混合色)
GPIO.output(11, GPIO.HIGH)
GPIO.output(13, GPIO.HIGH)
GPIO.cleanup()
实验结果:
黄红交替,自行脑补

四、准备知识
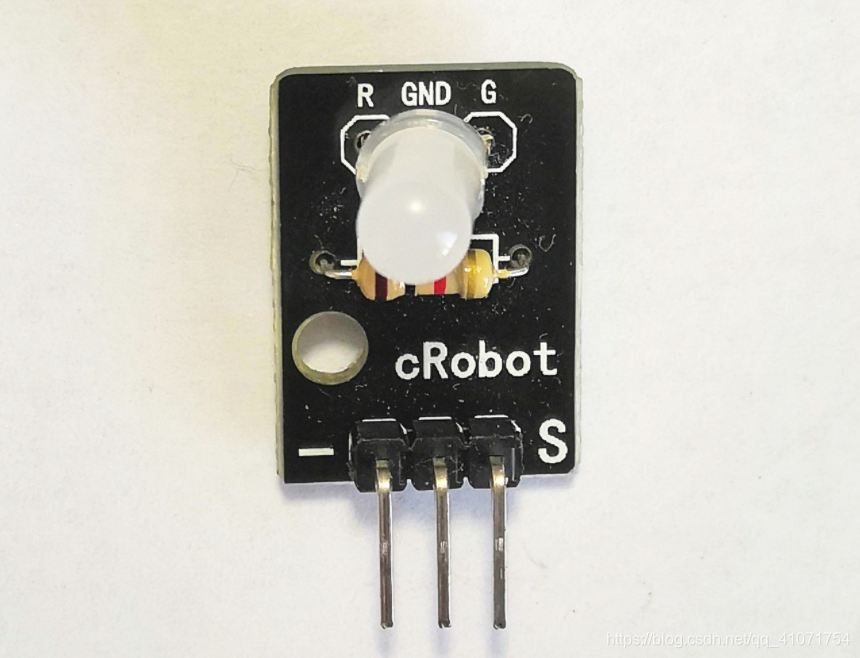
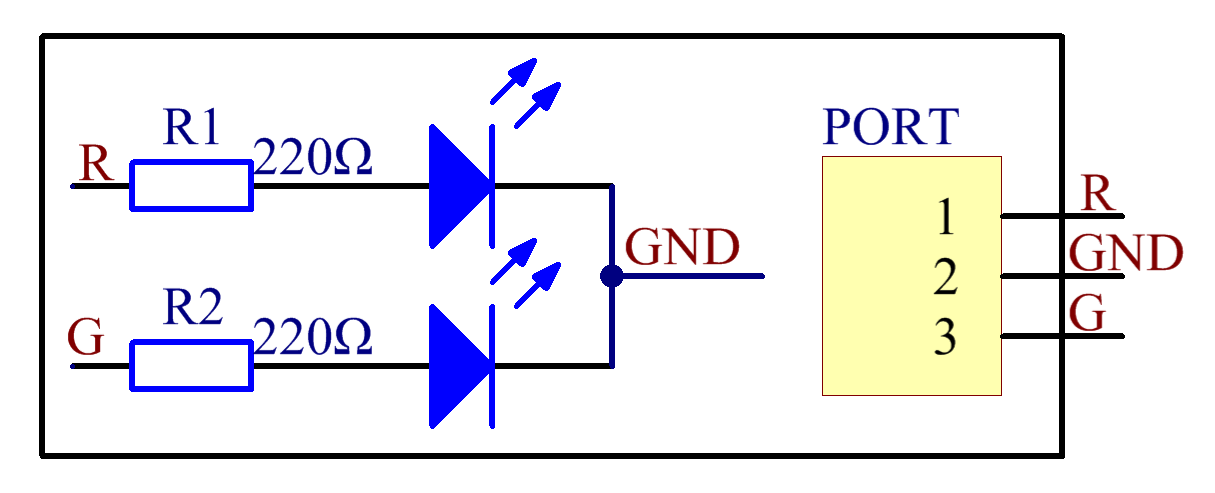
1、常见的双色Led模块
常见的双色led模块一般是这种,网上的大部分资料也都是这一种,红绿双色,中间接地。
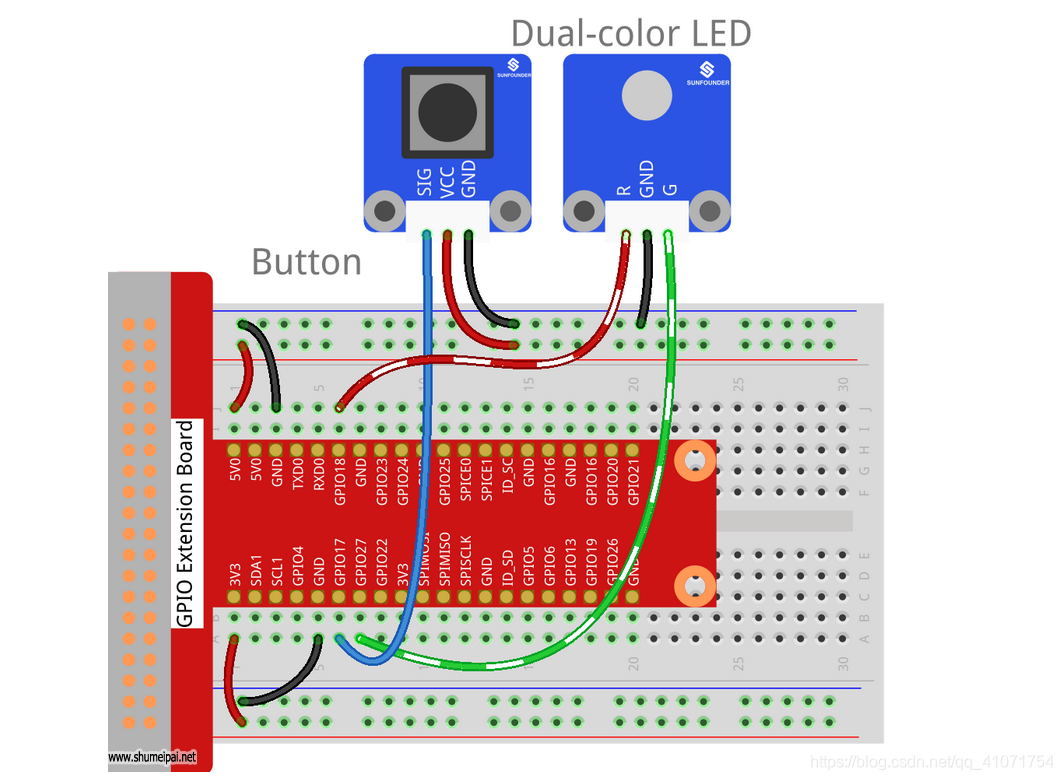
配合开关接线,实现开关灯实验。
#!/usr/bin/env python
import RPi.GPIO as GPIO
BtnPin = 11
Gpin = 12
Rpin = 13
def setup():
GPIO.setmode(GPIO.BOARD) # Numbers GPIOs by physical location
GPIO.setup(Gpin, GPIO.OUT) # Set Green Led Pin mode to output
GPIO.setup(Rpin, GPIO.OUT) # Set Red Led Pin mode to output
GPIO.setup(BtnPin, GPIO.IN, pull_up_down=GPIO.PUD_UP) # Set BtnPin's mode is input, and pull up to high level(3.3V)
GPIO.add_event_detect(BtnPin, GPIO.BOTH, callback=detect, bouncetime=200)
def Led(x):
if x == 0:
GPIO.output(Rpin, 1)
GPIO.output(Gpin, 0)
if x == 1:
GPIO.output(Rpin, 0)
GPIO.output(Gpin, 1)
def Print(x):
if x == 0:
print ' ***********************'
print ' * Button Pressed! *'
print ' ***********************'
def detect(chn):
Led(GPIO.input(BtnPin))
Print(GPIO.input(BtnPin))
def loop():
while True:
pass
def destroy():
GPIO.output(Gpin, GPIO.HIGH) # Green led off
GPIO.output(Rpin, GPIO.HIGH) # Red led off
GPIO.cleanup() # Release resource
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the child program destroy() will be executed.
destroy()
2、使用 RPi.GPIO 模块的输出(Output)的基础知识
1、首先对 RPi.GPIO 进行设置(根据这里的描述)
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
GPIO.setup(12, GPIO.OUT)
2、设置某个输出针脚状态为高电平:
GPIO.output(12, GPIO.HIGH)
# 或者
GPIO.output(12, 1)
# 或者
GPIO.output(12, True)
3、设置某个输出针脚状态为低电平:
GPIO.output(12, GPIO.LOW)
# 或者
GPIO.output(12, 0)
# 或者
GPIO.output(12, False)
4、程序结束后进行清理
GPIO.cleanup()
注意,您可以读取使用 input() 函数设置的输出通道的当前状态。例如对输出进行切换:
GPIO.output(12, not GPIO.input(12))
3、GPIO各种操作集合
import RPi.GPIO as GPIO
import time
GPIO.setmode(GPIO.BCM) #选择GPIO编码格式 BCM
channel = 1
# 1. 设置GPIO模式
GPIO.setup(channel,GPIO.IN) #输入模式
GPIO.setup(channel,GPIO.OUT) #输出模式
GPIO.setup(channel,GPIO.OUT,initial=GPIO.HIGH) #为输出的引脚设置默认值
# 2. 设置GPIO输出状态
chan_list=[11,12] #双倍同时输出快乐
GPIO.output(chan_list,GPIO.LOW) #同时输出低电平
GPIO.output(chan_list,(GPIO.HIGH,GPIO.LOW)) #分别输出不同电平
GPIO.output(12,not GPIO.input(12)) #读取一个输出引脚的状态并将其作为输出值
# 3. 读取GPIO当前状态
GPIO.input(channel) #低电平返回0/GPIO.LOW/False,高电平返回1/GPIO.HIGH/True。
GPIO.setup(channel,GPIO.IN,pull_up_down = GPIO.PUD_UP) #如果输入引脚处于悬空状态 上拉解决
GPIO.setup(channel,GPIO.IN,pull_up_down = GPIO.PUD_DOWN)#如果输入引脚处于悬空状态 下拉解决
# 4. 轮询读取Gpio
while GPIO.input(channel)==GPIO.LOW:
time.sleep(0.01)
# 5. 边缘阻塞检测Gpio(会阻塞直到检测到边缘响应,轮询)
# wait_for_edge()被用于阻止程序的继续执行,直到检测到一个边沿。
# GPIO.RISING、GPIO.FALLING、GPIO.BOTH 对边缘进行检测。
channel = GPIO.wait_for_edge(channel, GPIO.RISING, timeout=5000)
if channel is None:
print('Time out occurred')
else:
print('Edgedetectedonchannel',channel)
# 6. 线程回调边缘检测GPIO
# event_detected() 函数 event_detected() 函数被设计用于循环中有其它东西时使用,但不同于轮询的是,它不会错过当 CPU 忙于处理其它事物时输入状态的改变。
#单个回调
def my_callback(channel):
print('这是一个边缘事件回调函数!')
print('在通道 %s 上进行边缘检测' % channel)
print('该程序与您的主程序运行在不同的进程中')
GPIO.add_event_detect(channel, GPIO.RISING, callback=my_callback) # 在通道上添加上升临界值检测
#多个回调
def my_callback_one(channel):
print('回调 1')
def my_callback_two(channel):
print('回调 2')
GPIO.add_event_detect(channel, GPIO.RISING)
GPIO.add_event_callback(channel, my_callback_one)
GPIO.add_event_callback(channel, my_callback_two)
# 在通道上添加上升临界值检测,忽略由于开关抖动引起的小于 200ms 的边缘操作
GPIO.add_event_detect(channel, GPIO.RISING, callback=my_callback, bouncetime=200)
#或
GPIO.add_event_callback(channel, my_callback, bouncetime=200)
# 取消线程检测
GPIO.remove_event_detect(channel)