本篇介绍一类无人驾驶仿真环境 ——Udacity’s无人驾驶仿真环境。
1. Udacity
优达学城(Udacity)由Google无人车之父(也是《Probabilistic Robotics》一书的作者)Sebastian Thrun创立的一个“云端大学”,它让每个人都 有机会学习人工智能、数据科学、自动驾驶、自然语言处理、计算机视觉、AI量化投资、区块链、云计算等 。对于完成学习,并通过测试的同学,可以拿到优达学城颁发的纳米学位(不知道认可度怎么样),里面还介绍有帮忙找工作,也即就业支持。

看看无人驾驶工程课程设置情况:
都是大牛!
课程将近八千人民币,对于我来说性价比可能不是那么高。 不过如果想短期快速进入某领域(例如,无人驾驶),并希望找到一份不错的工作。我觉得报这个课程真的不亏。记得大三那年,有一个室友为了能找到一份java开发相关的工作(我们是电子信息工程,啥都学一些,都不精通,离真实工程关践差好多 ),花了一万六千元报了一个java工程师训练班。

里面有免费试听课,我听了怎么基于图像处理提取车道线的不到一分钟的课程。课程的确是精心设计,理论与代码比肩前行。我自己不排除在以后手头不紧的时候,选一门课好好学习(不一定是无人驾驶)。
2. Udacity’s 无人驾驶仿真环境
优达学城的无人驾驶工程师课程里,为了方便同学测试自己的代码的有效性,会有一些典型的无人驾驶仿真环境项目(路径规划、端到端的深度学习等)。
这些仿真环境是基于Unity开发的有特定场景、特定用途的封装环境。例如下面这两个:
-
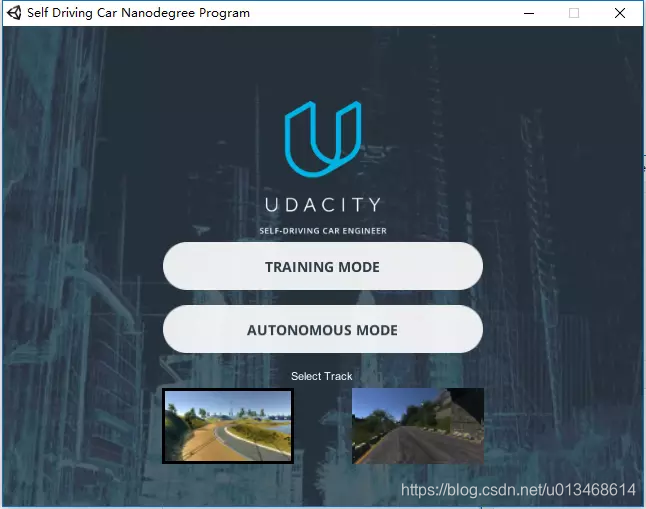
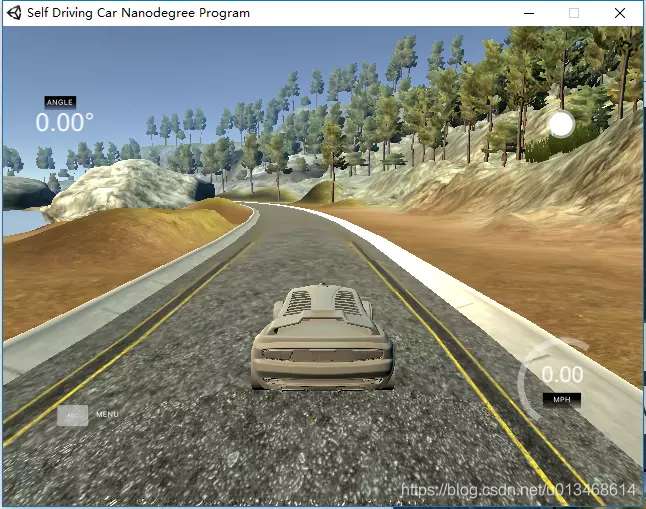
udacity/self-driving-car-sim
这是一个用基于深度学习的无人车的项目,我们可利用它来训练一个端到端的深度学习,也可以利用自己训练好的,或者是项目自带的模型驱动仿真环境中的无人车沿道路行驱,并超车等行为。安装方法不难,仿真环境是人家已经封装好的,真接下载你系统(windows, Mac, Linux)对应的可执行文件即可(里面有下载地址)。然后,把该项目git clone到本地,编译成功后,运行。记住,只需要两个东西:封装好的仿真环境与对应的git项目。
-
udacity/CarND-Path-Planning-Project
这是一个关于无人车路径规划的项目。配置步骤和上面的环境一样,先下载与系统对应的仿真环境,然后git clone项目到本地,编译,运行。

下图是运行编译好的代码控制车运行的视频。
总结
本篇介绍的仿真环境都是有特定应用目的,最好与对应的项目一起运行。它的好处是,我们能够利用封装好的仿真环境以及项目代码,快速地、方便地入门一个知识空白领域。由于仿真器的接口并不是太友好,如果想让该仿真环境真的为自己服务,你得花时间去了解仿真环境的所有接口,数据流。另外,github/Udacity目录下的还有很多其它项目。我真的感觉自己来到了知识的海泮,看看这个是好的,那个也是好的,我的眼底全是光啊。只是一个人的精力就这么些,我真得好好学习了。