目录
本系列教程包含以下文章,欢迎阅读:
SimpleFOC移植STM32(二)—— 开环控制
SimpleFOC移植STM32(三)—— 角度读取
SimpleFOC移植STM32(四)—— 闭环控制
SimpleFOC移植STM32(五)—— 电流采样及其变换
一、代码移植说明
多年前第一次听说“开源”这个事儿的时候非常不理解,自己辛苦写的代码让别人随意下载研究多吃亏呀,后来见的多了,发现开源也有它自身的一套商业逻辑。但是无论如何开源促进了技术的进步,避免大家重复造轮子,所以这是一件好事!
网上很多文章讲FOC都是以无感电机为例,讲一堆诸如观测器,磁链方程,滑模观测器,FAST观测器,反正切等等深奥的理论,导致大家觉得FOC非常难。实际对于有感电机来说,通过编码器直接读取角度θ,所有跟位置相关的算法全都不用,甚至电机的电感电阻这些参数也可以不用。创作者从有感电机入手,避开了无感电机复杂的算法,我觉得这个项目是学习FOC的最佳切入点。
原版代码要兼容多平台,所以在结构上会有更多的抽象层,移植后的代码只针对STM32,所以一些不必要的中间层会被省略掉,这是结构上的优化,但在程序上尽可能的保留了原版风貌,只对严重影响性能和功能的部分代码做了优化,方便大家学习对比。本次只移植了磁编码器云台电机的对应代码,其它类型的电机(比如步进电机、hall电机和ABZ编码器)本次没有移植,请知悉!
在上一个系列文章中,一直没有演示电流采集部分的功能,本次移植把这部分的功能也添加了上来。另外创作者的代码还在不断更新中,本次代码是在Simple FOC V2.1.1的基础上移植。
二、控制原理
2.1、有感FOC控制原理
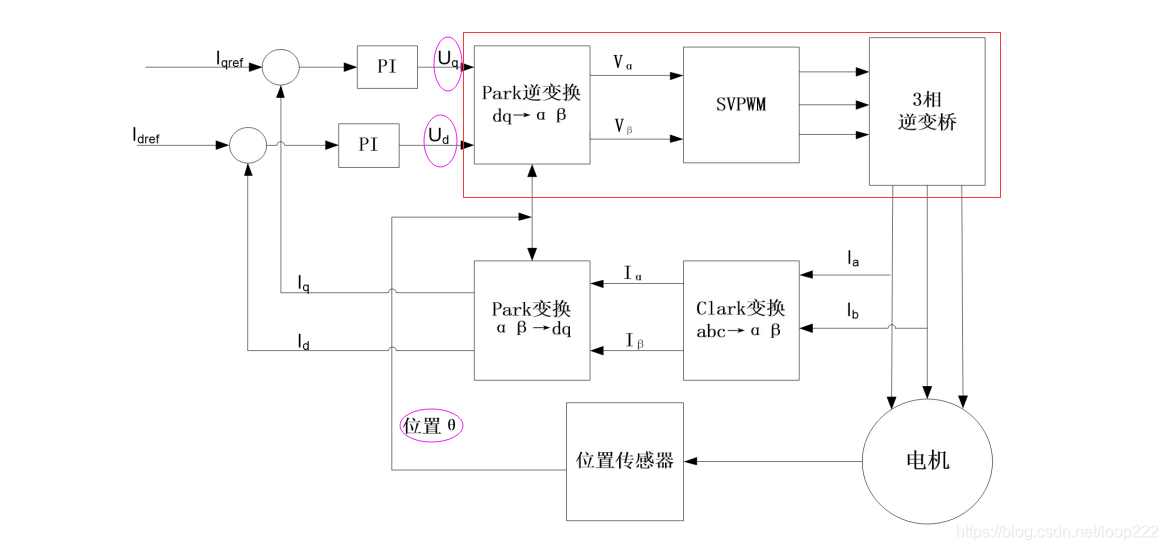
本次移植对应如下原理框图,其中核心函数的功能对应图中方框部分,输入的三个参数也在图中标记,setPhaseVoltage(float Uq, float Ud, float angle_el)。
2.2、有感FOC(不带电流采样)控制原理
去掉电流采样及变换公式,这样看起来是不是更加简单了。实际上这样做也可以控制电机,simpleFOC(一)——(八)系列就是对应下图原理,本系列的前几节也都围绕这个原理图来讲,请大家认真看图。

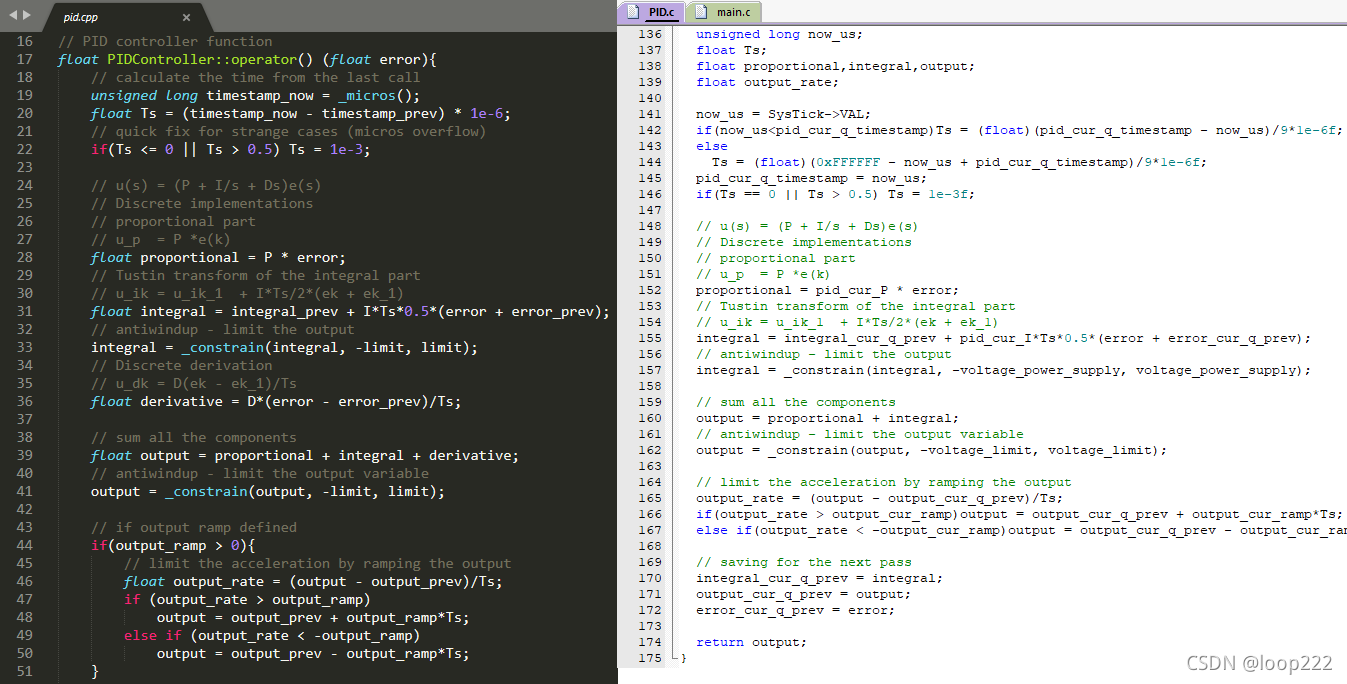
2.3、FOC heart function
原版代码包含了FOC的四种模式:Trapezoid_120、Trapezoid_150、SPWM和SVPWM,本次只移植了大家最关心的SVPWM部分。掌握核心函数的应用意义重大(你可以不了解算法,只要知道大概原理,会用即可),可以帮你快速理解整个程序。(原版代码路径:此电脑\文档\Arduino\libraries\Simple_FOC\src\BLDCMotor.cpp)
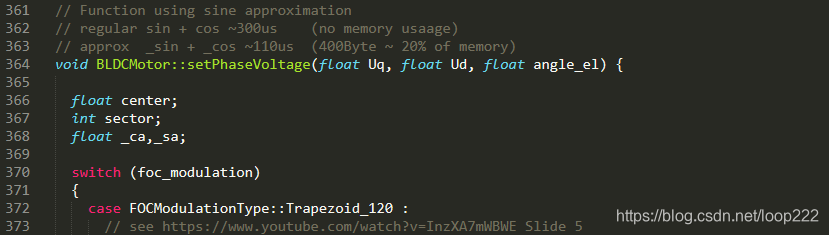
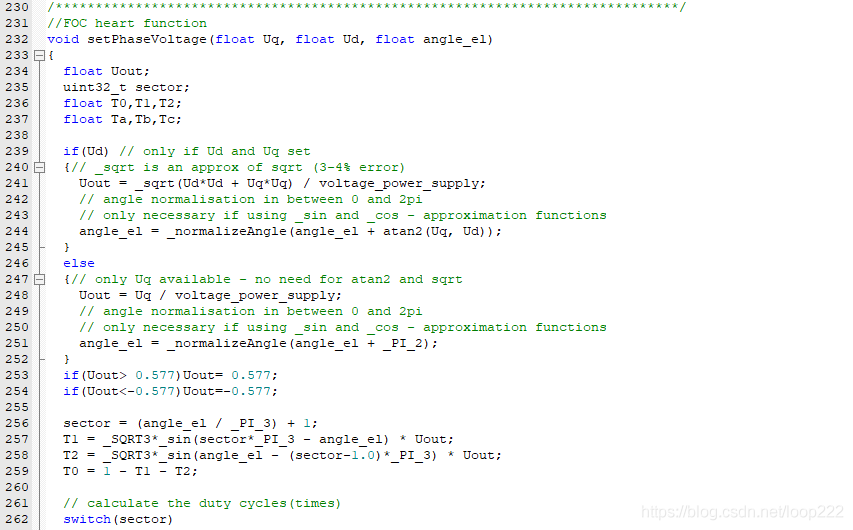
下图为移植后的代码,
三、适配硬件
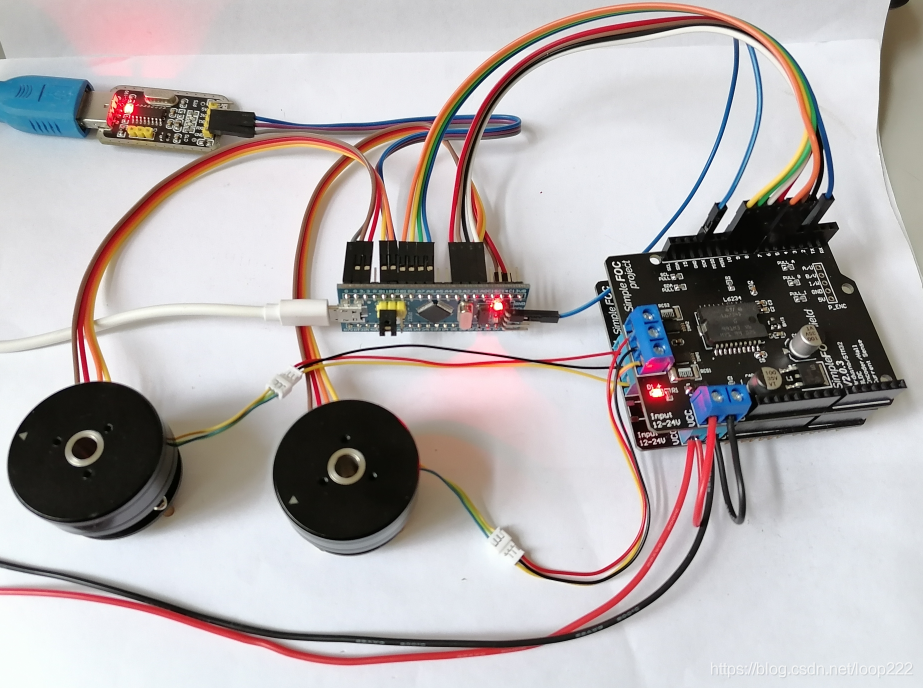
3.1、Bluepill
本次移植的代码支持Bluepill,单电机控制和双电机控制,按照教程接线,编译后下载运行。
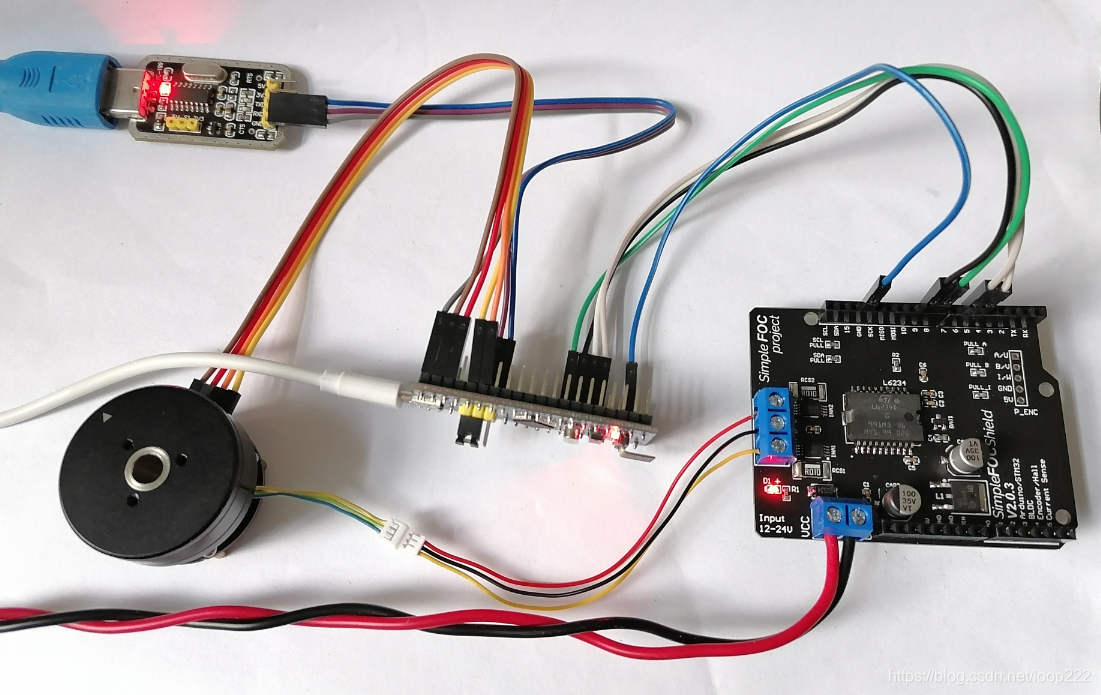
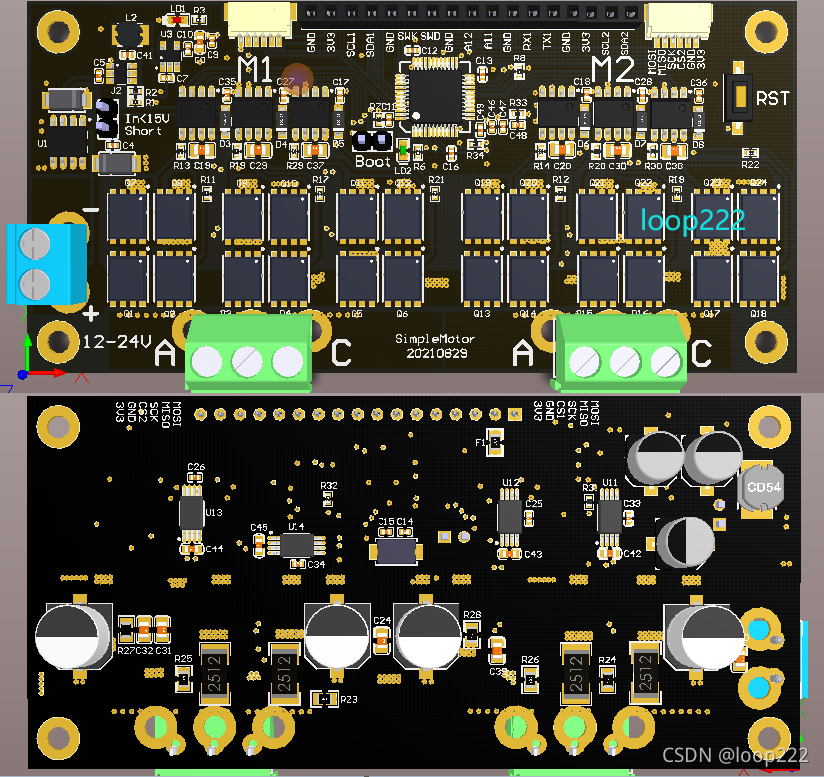
3.2、SimpleMotor
为了减少跳线,让大家能够更专注于代码学习,本人开发了SimpleMotor驱动板,STM32F103C8T6单片机,支持大功率双电机驱动,兼容《SimpleFOC(七)——STM32(Bluepill)的应用》演示的大部分代码,本次移植的所有代码都将在这个驱动器上运行。
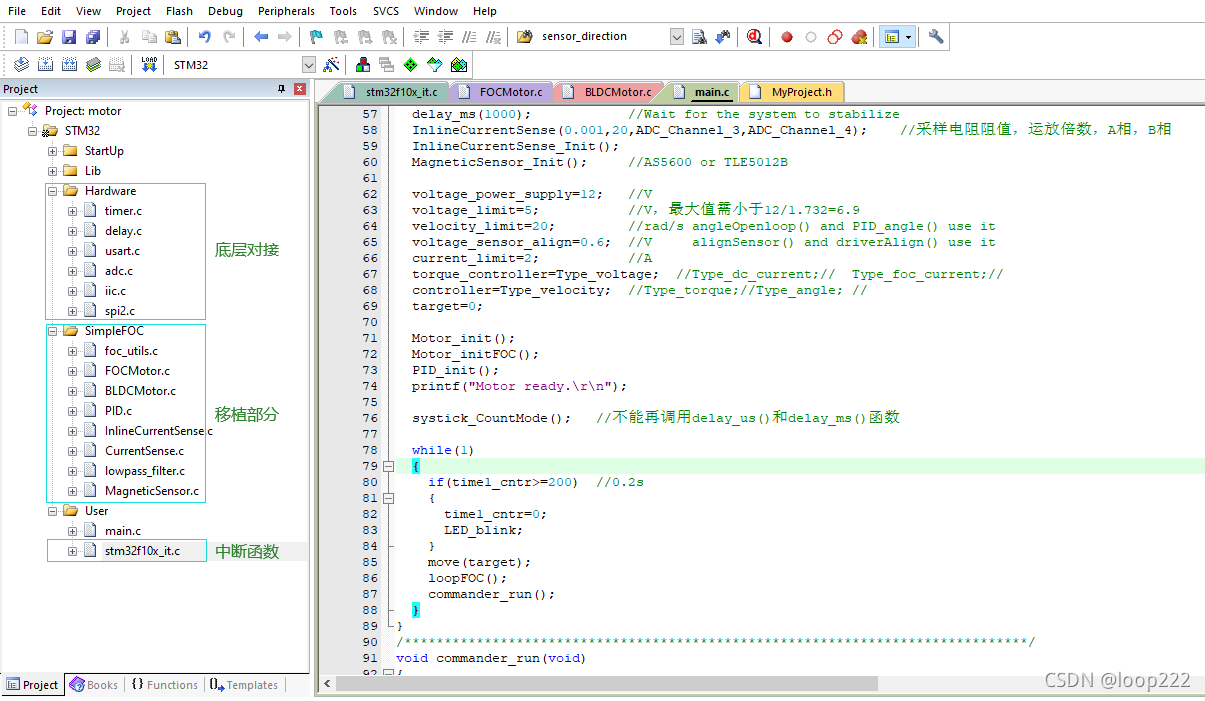
四、程序架构
原版代码中几乎不用中断(必须赞叹下创作者高超的软件写作能力),我猜测是为了提高跨平台时的兼容性,本次移植只增加了一个中断,TIMER4的1ms中断(已有串口接收中断),通过中断累加计时,在主循环中控制LED指示灯或者打印需要的数据,主要为调试方便。
五、演示功能
总体与SimpleFOC(一)——(八)系列教程的示例一致,增加了电流采样和更多大电机的控制演示。
1、SimpleFOC移植STM32(一)—— 简介
2、SimpleFOC移植STM32(二)—— 开环控制
3、SimpleFOC移植STM32(三)—— 角度读取
4、SimpleFOC移植STM32(四)—— 闭环控制
5、SimpleFOC移植STM32(五)—— 电流采样及其变换
6、SimpleFOC移植STM32(六)—— 双电机控制
=============================================
六、2021.9.3更新
6.1、当前的问题
一个月前写的这篇文章,当时代码已经移植完并测试了大部分功能,只剩电流采样和电流环的测试,原计划很快就可以调试完然后开始写教程,中间却出了问题,硬件设计和电流PID调参的问题混在一起,找到问题重新设计PCB,再测试就到现在了。
硬件的问题主要是第一版PCB把电流运放芯片和模拟电路放到了一起,虽然电源是分开的但还是干扰明显,第二版中把运放和数字电路放到一起干扰问题解决了。(VESC就是把运放和模拟电路放到了一起,但是也很稳定,第一版PCB参考了它的设计但是却不行,我所说的这个问题只针对我这个PCB。)
电流环PID的问题调试了几天没有解决,暂时不调了。电流采样的AD值总会有波动,如果PI参数过大,就会放大这个波动,如果PI参数过小,运行时达不到设定值,这挺矛盾的。网上有个说法FOC不一定非得电流环,也可以把电流检测作为电流限制,这个说法我暂时接受,而且实际测试使用电压方式也还行。这个问题等我以后找到更好的方法后再来解决,或者代码开源后有热心网友能解决那就更好了。
电流环这个问题只针对SimpleMotor这样的大电流驱动,官方的V2.0.3最大电流只有5A,是不存在这个问题的,因为放大倍数小,AD值的微小波动转为电流值以后仍然很小,对系统稳定性几乎没有影响。
6.2、驱动器性能
有同学问到STM32F103C8T6控制两个电机并且还要跑浮点数,能跑的动吗?103C8跑浮点数确实很吃力。
实际测试只带一个电机,
I2C的编码器AS5600(硬件I2C,400KhZ),主循环,voltage模式1885Hz,foc_current模式1110Hz。
SPI的编码器TLE5012B(硬件SPI2,9MhZ),主循环,voltage模式3180Hz,dc_current模式1990Hz,foc_current模式1460Hz。
如果是双电机,估计还要一半。这和主流的10kHz的速度比差太远了。
提升速度的方式有两种,一个是用带浮点运算的单片机,比如STM32F407,方法简单,但是由此会导致成本的上升,另一个办法是把浮点数转换为定点数来运算,效率也会成倍提升,但是归一化后的代码会非常难以理解,不利于代码的学习。所以这是一个取舍,创作者既然把它命名为SimpleFOC,还要让代码运行在MEGA328这样的芯片上,我觉得包含了把它定位为入门学习的这样一个目的。

6.3、电源选择
1、锂电池最好,电机减速时会进入发电模式,发电的电压高低跟电机的功率和转速有关,电池可以吸收发电,保证母线电压不会超过电池电压,

2、可调电源,本质上是开关电源,增加了电压和电流显示,操作起来更直观,

3、适配器,属于小功率开关电源,小功率电机可以用用,

4、大功率开关电源,

6.4、sublime
代码查看我用的是这个软件,如果你有自己习惯的编辑器也可以,
官网下载:https://www.sublimetext.com/。可以免费也可以付费,免费的每次打开软件都提示付费,不用管就行。可以单独打开C文件查看代码,也可以把整个文件夹拖入,查找关键字非常方便,具体用法可以百度。
(完)
欢迎加入simpleFOC技术交流群:923734429 (入群申请写:CSDN)
阅读上一个系列文章:
SimpleFOC(一)—— 简介(附有文件下载链接)
SimpleFOC(二)—— 快速入门 (开环控制)
SimpleFOC(三)—— AS5600角度读取
SimpleFOC(四)—— 闭环控制
SimpleFOC(五)—— 双电机控制
SimpleFOC(六)—— PowerShield和AS5047P
SimpleFOC(七)——STM32(Bluepill)的应用
SimpleFOC(八)—— 理论+实践 深度分析SVPWM
SimpleFOC(九)—— 霍尔电机控制