0、系列目录
1、简介
在四轴的调试中,经常要使用地面站与飞控之间进行通讯,可以调试飞控中的数据,比如PID参数,零点漂移值,传感器数值微调等等,所以在飞控中会预先编写与上位机通讯的代码。本次我们使用匿名科创开发的四轴上位机V2.6版,实现从STM32发送陀螺仪原始数据,姿态角,PID参数到上位机。
2、硬件连接
(1)STM32与MPU6050
(2)STM32的串口1与上位机
3、通讯协议
通讯代码都是基于通讯协议编写的,就好像对暗号一样,暗号正确才会进行数据传输。
匿名上位机的通讯协议大体上都遵循
0x88+FUN+LEN+DATA+NUM
帧头+命令字+数据长度+数据+校验位
具体的通讯协议可以打开匿名上位机软件,按F12查看。我也总结了一下放在了这里,大家可以自行下载
匿名上位机V2.6通讯协议
本次我总共编写了5个通讯办法
1个自定义数据帧+4个官方数据帧
自定义数据帧:
发送MPU6050的原始数据
官方数据帧:
1、飞控显示帧,实现在上位机上观看到四轴的3D动画和波形
2、遥控器数据发送帧:将遥控器的各个数据发送到上位机包括PWM占空比
3、PID数据发送帧:将STM32中设定的PID参数发送到上位机
4、零偏数据发送帧:将STM32中测定的零偏值发送给上位机
4、代码实现
前面我们需要先封装下面两个代码,可以让后面通讯程序编写更加简单
/**
* 功能:串口发送一个字符串
* 入口参数:c,发送的字符
* 返回值:无
*/
void usart1_send_char(u8 c)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);
USART_SendData(USART1,c);
}
/**
* 功能:发送数据给匿名上位机(V2.6)
* 入口参数:fun,功能字,0xA0~0xAF
* data,数据缓存区,最多28个字节
* len,data数据长度
* 返回值:无
* 注:数据格式:0x88+FUN+LEN+DATA+SUM
*/
void usart1_niming_report(u8 fun,u8 *data,u8 len)
{
u8 send_buf[32]={
0x00};
u8 i;
if(len>28) return;//超过28个字节,无效
send_buf[len+3]=0;//校验位置零
send_buf[0]=0x88;//帧头0x88
send_buf[1]=fun;//命令帧FUN
send_buf[2]=len;//数据长度帧LEN
for(i=0;i<len;i++)
send_buf[i+3]=data[i];
for(i=0;i<len+3;i++)
send_buf[len+3] += send_buf[i];//计算数据校验位SUM
for(i=0;i<len+4;i++)
usart1_send_char(send_buf[i]);//发送数据到串口1
}
/** 自定义帧0xA1
* 功能:发送加速度传感器和陀螺仪传感器数据给匿名上位机(V2.6)
* 入口参数:aacx,aacy,aacz:xyz三个方向的加速度值
* gyrox,gyroy,gyroz:xyz三个方向的陀螺仪值
* 返回值:无
* 注:数据格式:0x88+FUN+LEN+DATA+SUM
*/
void mpu6050_send_data(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz)
{
u8 buf[12];
buf[0]=(aacx>>8)&0xFF;
buf[1]=aacx&0xFF;
buf[2]=(aacy>>8)&0xFF;
buf[3]=aacy&0xFF;
buf[4]=(aacz>>8)&0xFF;
buf[5]=aacz&0xFF;
buf[6]=(gyrox>>8)&0xFF;
buf[7]=gyrox&0xFF;
buf[8]=(gyroy>>8)&0xFF;
buf[9]=gyroy&0xFF;
buf[10]=(gyroz>>8)&0xFF;
buf[11]=gyroz&0xFF;
usart1_niming_report(0xA1,buf,12);
}
/** 飞控显示帧
* 功能:上报解算后的姿态数据给上位机
* 入口参数:aacx,aacy,aacz:xyz三个方向的加速度值
* gyrox,gyroy,gyroz:xyz三个方向的陀螺仪值
* yaw,偏航角,单位为0.1度 0 -> 3600 对应 0 -> 360.0度
* roll,横滚角,单位0.01度。 -18000 -> 18000 对应 -180.00 -> 180.00度
* pitch,俯仰角,单位 0.01度。-9000 - 9000 对应 -90.00 -> 90.00 度
* 返回值:无
* 注:数据格式:0x88+0xAF+0x1C+ ACC DATA + GYRO DATA + MAG DATA + ANGLE DATA(roll/pitch/yaw) +0x00+0x00+0x00+0x00+SUM
* ANGLE的roll和pitch数据为实际值乘以100以后得到的整数值,yaw为乘以10以后得到的整数值
*/
void usart1_report_imu(short aacx,short aacy,short aacz,short gyrox,short gyroy,short gyroz,short roll,short pitch,short yaw)
{
u8 buf[28]={
0x00};
buf[0]=(aacx>>8)&0xFF;
buf[1]=aacx&0xFF;
buf[2]=(aacy>>8)&0xFF;
buf[3]=aacy&0xFF;
buf[4]=(aacz>>8)&0xFF;
buf[5]=aacz&0xFF;
buf[6]=(gyrox>>8)&0xFF;
buf[7]=gyrox&0xFF;
buf[8]=(gyroy>>8)&0xFF;
buf[9]=gyroy&0xFF;
buf[10]=(gyroz>>8)&0xFF;
buf[11]=gyroz&0xFF;
//12-17为磁力计,MPU6050没有磁力计,发送0x00
buf[18]=(roll>>8)&0xFF;
buf[19]=roll&0xFF;
buf[20]=(pitch>>8)&0xFF;
buf[21]=pitch&0xFF;
buf[22]=(yaw>>8)&0xFF;
buf[23]=yaw&0xFF;
//24-27为数据格式中的0x00
usart1_niming_report(0xAF,buf,28);
}
/**
* 功能:发送PID数据给上位机
* 入口参数:rol_p,rol_i,rol_d,pit_p,pit_i,pit_d,yaw_p,yaw_i,yaw_d
* 返回值:无
* 格式为:0X88 0XAC 0X1C 0XAD + PID数据 + 无用数据 + SUM
*/
void usart1_report_pid(u16 rol_p,u16 rol_i,u16 rol_d,u16 pit_p,u16 pit_i,u16 pit_d,u16 yaw_p,u16 yaw_i,u16 yaw_d)
{
u8 buf[28]={
0x00};
buf[0]=0xAD;
buf[1]=(rol_p>>8)&0xFF;
buf[2]=rol_p&0xFF;
buf[3]=(rol_i>>8)&0xFF;
buf[4]=rol_i&0xFF;
buf[5]=(rol_d>>8)&0xFF;
buf[6]=rol_d&0xFF;
buf[7]=(pit_p>>8)&0xFF;
buf[8]=pit_p&0xFF;
buf[9]=(pit_i>>8)&0xFF;
buf[10]=pit_i&0xFF;
buf[11]=(pit_d>>8)&0xFF;
buf[12]=pit_d&0xFF;
buf[13]=(yaw_p>>8)&0xFF;
buf[14]=yaw_p&0xFF;
buf[15]=(yaw_i>>8)&0xFF;
buf[16]=yaw_i&0xFF;
buf[17]=(yaw_d>>8)&0xFF;
buf[18]=yaw_d&0xFF;
usart1_niming_report(0xAC,buf,28);
}
/**
* 功能:遥控,电机pwm,电压显示
* 入口参数:throt,yaw,roll,pitch,aux1,aux2,aux3,aux4,aux5,pwm1,pwm2,pwm3,pwm4,vol(电压)
* 返回值:无
* 帧格式:0x88+0xAE+0x12+THROT YAW ROLL PITCH AUX1 2 3 4 5 PWM:1 2 3 4 VOLTAGE+SUM
遥控数据最小在1000左右,最大在2000左右。数据都为uint16格式,
其中pwm范围1-100,voltage为实际值*100。
*/
void usart1_report_rc(short thort,short yaw,short roll,short pitch,
short aux1,short aux2,short aux3,short aux4,short aux5,
short pwm1,short pwm2,short pwm3,short pwm4,
short vol)
{
u8 buf[28]={
0x00};
//THROT YAW ROLL PITCH
buf[0]=(thort>>8)&0xFF;//
buf[1]=thort&0xFF;//
buf[2]=(yaw>>8)&0xFF;//
buf[3]=yaw&0xFF;//
buf[4]=(roll>>8)&0xFF;//
buf[5]=roll&0xFF; //
buf[6]=(pitch>>8)&0xFF;//
buf[7]=pitch&0xFF;//
//AUX1 2 3 4 5
buf[8]=(aux1>>8)&0xFF;
buf[9]=aux1&0xFF;
buf[10]=(aux2>>8)&0xFF;
buf[11]=aux2&0xFF;
buf[12]=(aux3>>8)&0xFF;
buf[13]=aux3&0xFF;
buf[14]=(aux4>>8)&0xFF;
buf[15]=aux4&0xFF;
buf[16]=(aux5>>8)&0xFF;
buf[17]=aux5&0xFF;
//PWM:1 2 3 4
buf[18]=(pwm1>>8)&0xFF;
buf[19]=pwm1&0xFF;
buf[20]=(pwm2>>8)&0xFF;
buf[21]=pwm2&0xFF;
buf[22]=(pwm3>>8)&0xFF;
buf[23]=pwm3&0xFF;
buf[24]=(pwm4>>8)&0xFF;
buf[25]=pwm4&0xFF;
//VOLTAGE
buf[26]=(vol>>8)&0xFF;
buf[27]=vol&0xFF;
usart1_niming_report(0xAE,buf,28);
}
/**
* 功能:发送offset给上位机
* 入口参数:acc_x,acc_y,acc_z,gyro_x,gyro_y,gyro_z
* 返回值:无
* 格式为:0X88 0XAC 0X1C 0XAC + 传感器零偏数据ACC XYZ GYRO XYZ+无用数据+SUM
*/
void usart1_report_offset(short acc_x,short acc_y,short acc_z,short gyro_x,short gyro_y,short gyro_z)
{
u8 buf[28]={
0x00};
buf[0]=0xAC;
buf[1]=(acc_x>>8)&0xFF;
buf[2]=acc_x&0xFF;
buf[3]=(acc_y>>8)&0xFF;
buf[4]=acc_y&0xFF;
buf[5]=(acc_z>>8)&0xFF;
buf[6]=acc_z&0xFF;
buf[7]=(gyro_x>>8)&0xFF;
buf[8]=gyro_x&0xFF;
buf[9]=(gyro_y>>8)&0xFF;
buf[10]=gyro_y&0xFF;
buf[11]=(gyro_z>>8)&0xFF;
buf[12]=gyro_z&0xFF;
usart1_niming_report(0xAC,buf,28);
}
5、下载试验
主函数中编写
mpu6050_send_data(aacx,aacy,aacz,gyrox,gyroy,gyroz);
usart1_report_imu(aacx,aacy,aacz,gyrox,gyroy,gyroz,(int)(roll*100),(int)(pitch*100),(int)(yaw*10));
usart1_report_rc(1500,(int)yaw,(int)roll,(int)pitch,1200,1200,1200,1200,1200,90,40,50,100,300);
usart1_report_pid(123,123,123,456,456,456,789,789,789);
usart1_report_offset(aacx,aacy,aacz,gyrox,gyroy,gyroz);
本次实验数据为自行编写的静态数据,只是为了验证通讯协议函数是否正确,后期加入PID和遥控器后,可以将动态数据代入即可。
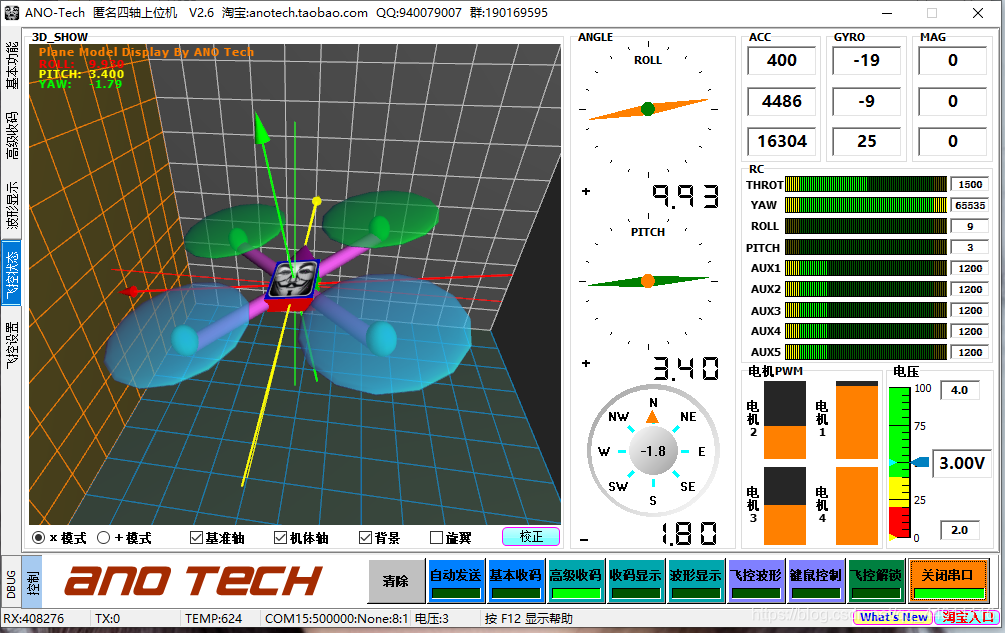
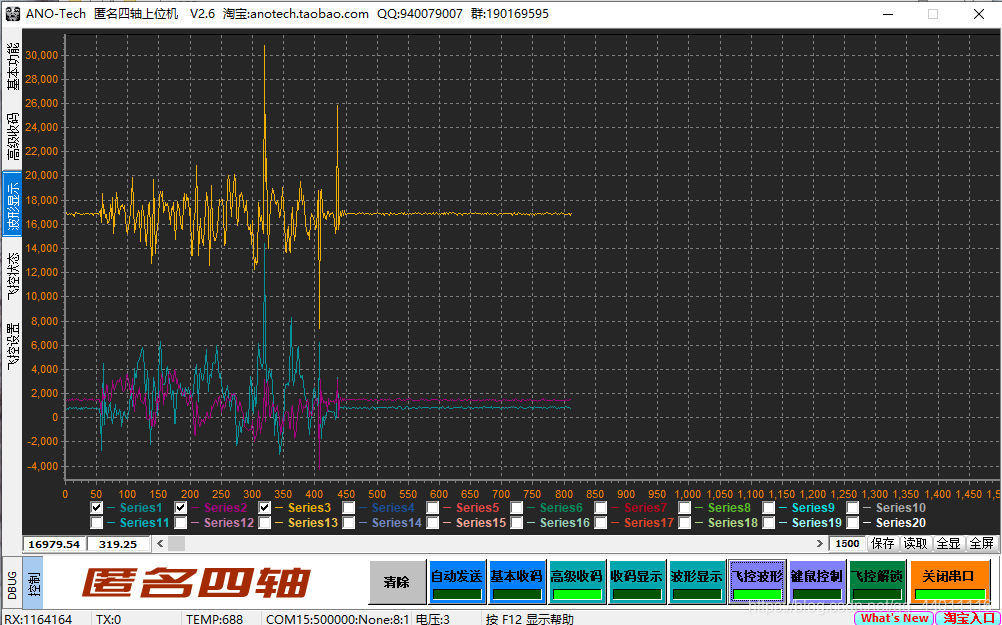
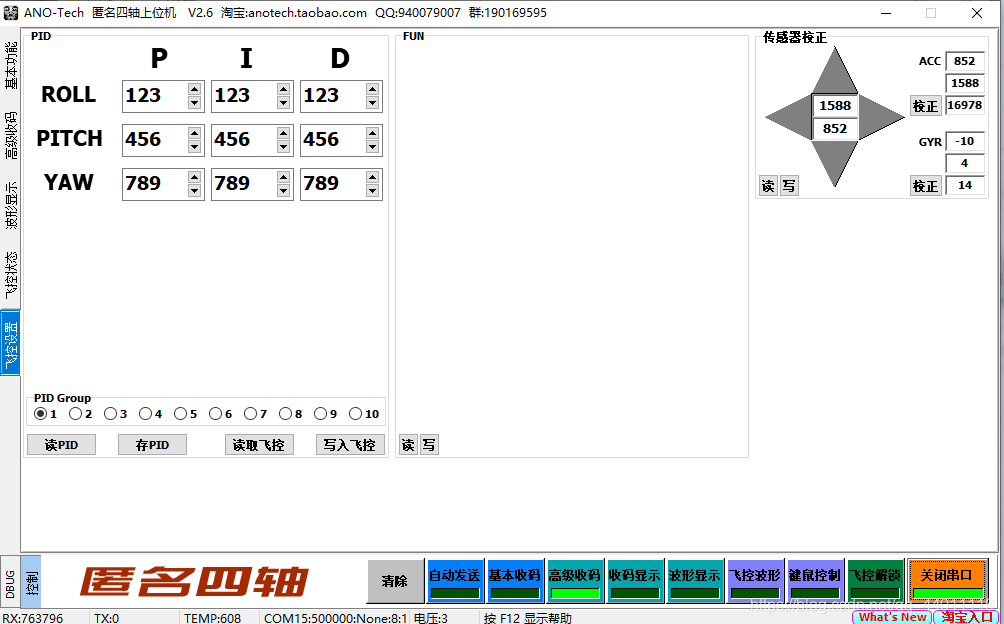
可以看到无论是飞控姿态,数据波形,遥控器的PWM和电压,PID数值都和我们设定的数值相同,说明协议编写正确。
总结
上面介绍的通讯协议都是 STM32-》上位机,通讯函数只要按照官方的协议编写就不会出错,后面会补充上位机-》STM32的通讯函数,这些函数是为了在上位机上更改STM32中的设定参数值。加油!奥力给