很早就打算写这篇博客了,最近遇到的问题比较多,所以拖了又拖,今天问题似乎解决了,等着程序运行的时候再来回顾一下Batch Normalization算法。
Batch Normalization是2015年Google研究员在论文《Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift》一文中提出的,同时也将BN应用到了2014年的GoogLeNet上,也就是Inception-v2。
BN算法在很大程度上加速了训练过程,放宽了网络初始化的条件,论文中还提出有了BN可以在不使用Dropout,同时也可以在一定程度上提升网络的识别效果,在之后的ResNet等等新网络中有广泛的应用。
下面我们来详细的看一下BN算法。
1. 要解决的问题
自从2012年以来,CNN网络模型取得了非常大的进步,而这些进步的推动条件往往就是模型深度的增加。从AlexNet的几层,到VGG和GoogleNet的十几层,甚至到ResNet的上百层,网络模型不断加深,取得的效果也越来越好,然而网络越深往往就越难以训练。我们知道,CNN网络在训练的过程中,前一层的参数变化影响着后面层的变化(因为前面层的输出是后面的输入),而且这种影响会随着网络深度的增加而不断放大。在CNN训练时,绝大多数都采用mini-batch使用随机梯度下降算法进行训练,那么随着输入数据的不断变化,以及网络中参数不断调整,网络的各层输入数据的分布则会不断变化,那么各层在训练的过程中就需要不断的改变以适应这种新的数据分布,从而造成网络训练困难,难以拟合的问题。
(可以这样想,比如网络中每一层都是一个人,今天前面一层的人说要你往左走3,明天有让你往左走2,第三天又让你往右走5,结果三天下来,你还在原地,这样就让你的进度变慢了。PS:我是这样理解的,如有问题,请指出)
BN算法解决的就是这样的问题,他通过对每一层的输入进行归一化,保证每层的输入数据分布是稳定的,从而达到加速训练的目的。
2. BN算法流程
BN算法的理论推导我这里就不多说了(原因是理解的不透彻= =),这里只讲一下算法的流程。
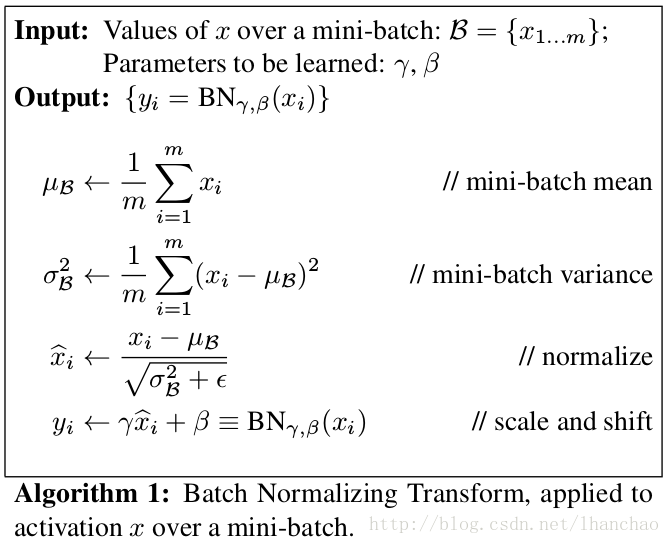
首先,BN算法在每一次iteration中的每一层输入都进行了归一化,将输入数据的分布归一化为均值为0,方差为1的分布,如下式:
但是这种做法有一个致命的缺点,尽管这样把每层的数据分布都固定了,但是这种分布不一定是前面一层的要学习到的数据分布,这样强行归一化就会破坏掉刚刚学习到的特征,BN算法的第二步就解决了这个缺点。
BN算法在第二步中设置了两个可学习的变量 γγ 和 ββ ,然后用这两个可学习的变量去还原上一层应该学到的数据分布
2.1 BN算法在训练和测试时的应用
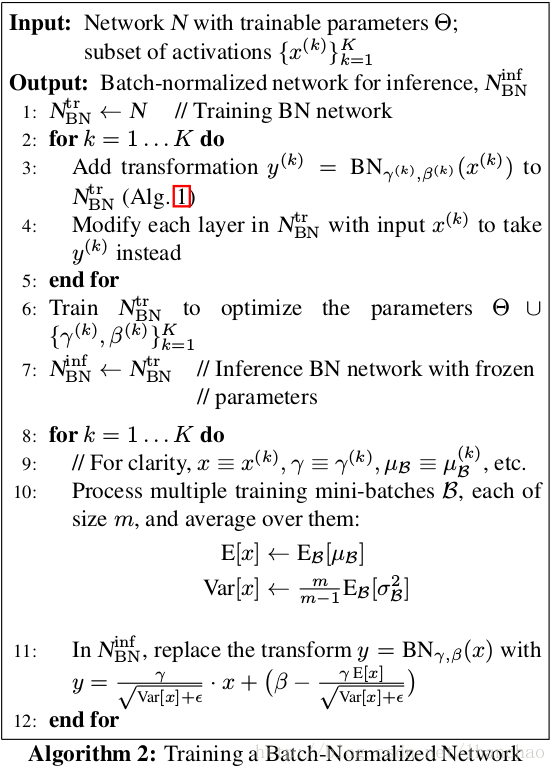
BN算法在训练时的操作就如我们上面所说,首先提取每次迭代时的每个mini-batch的平均值和方差进行归一化,再通过两个可学习的变量恢复要学习的特征。
但是在实际应用时就没有mini-batch了,那么BN算法怎样进行归一化呢?实际上在测试的过程中,BN算法的参数就已经固定好了,首先进行归一化时的平均值和方差分别为:
最终BN算法的训练和测试的流程如下图所示:
在TensorFlow中使用BN
1.tf.nn.moments(x, axes, shift=None, name=None, keep_dims=False)
x是输入张量,axes是在哪个维度上求解, 即想要 normalize的维度, [0] 代表 batch 维度,如果是图像数据,可以传入 [0, 1, 2],相当于求[batch, height, width] 的均值/方差,注意不要加入channel 维度。该函数返回两个张量,均值mean和方差variance。
2.tf.identity(input, name=None)
返回与输入张量input形状和内容一致的张量。
3.tf.nn.batch_normalization(x, mean, variance, offset, scale, variance_epsilon,name=None)
计算公式为scale(x - mean)/ variance + offset。
这些参数中,tf.nn.moments可得到均值mean和方差variance,offset和scale是可训练的,offset一般初始化为0,scale初始化为1,offset和scale的shape与mean相同,variance_epsilon参数设为一个很小的值如0.001。
参考文献:https://blog.csdn.net/marsjhao/article/details/72876460
https://blog.csdn.net/lhanchao/article/details/70308092