创建小海龟位置订阅者
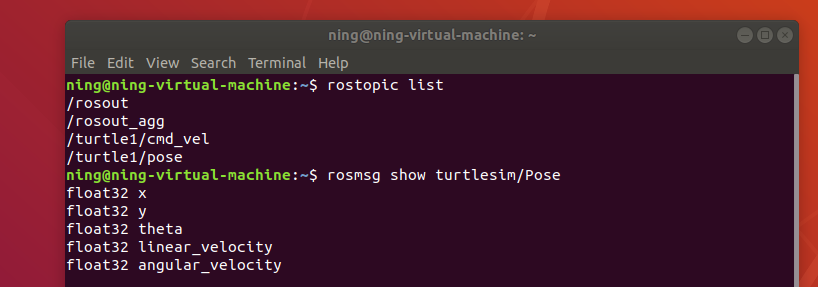
在启动小海龟仿真之后,ROS会默认发布一个名为“/turtle1/Pose”的topic
其中发布的是turtlesim/Pose类型的数据
包含小海龟的位置x、y;偏航角theta;线速度linear_velocity;角速度angular_velocity。
现在,我们在之前的learning_pub_sub_pkg功能包中创建也个订阅者,来订阅小乌龟位置,并打印到终端:
首先,在learning_pub_sub_pkg功能包的src文件夹下创建名为 pose_subscriber.cpp 的cpp文件。
cd ros_wxw/src/learning_pub_sub_pkg/src/