CMakeLists.txt设置
该篇为CMakeLists.txt设置后面会有:发布者、订阅者代码,与之连接。
本人是理科生,做这文档也是为了以后生活中害怕忘记,而发布的,并且希望能帮到大家,发布的越多,入坑起来的快。入坑可难受了,天天抠头发。
注:有点详细,免得大家抠头发,阅读可以直接看代码。
记得使用前要在终端打开roscore,还有代码的编译catkin_make
配套代码连接区:
配套发布者Talker
配套订阅者Listener
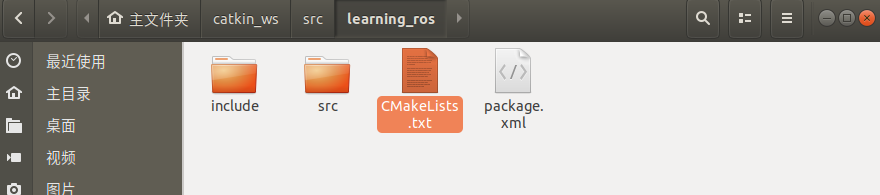
1.打开下图路径,找到CMakeLists.txt文件然后添加编译选项。
2.打开,直接去找build。

3.解锁,文件里面自带有,把前面的#号去掉。

4.在指定位置添加下列代码下面的代码可以任意添加在build中,我为了美观所以添加在相应位置的,只要在build中添加都生效。
add_executable(Talker src/Talker.cpp)
add_executable(Listener src/Listener.cpp)
add_dependencies(Talker ${PROJECT_NAME}_generate_messages_cpp)
target_link_libraries(Talker
${catkin_LIBRARIES}
)
target_link_libraries(Listener
${catkin_LIBRARIES}
)



