论文链接:A Comprehensive Study of Deep Video Action Recognition
目录
- A Comprehensive Study of Deep Video Action Recognition
- Abstract
- 1. Introduction
- 2. Datasets and Challenges
- 3. An Odyssey of Using Deep Learning for Video Action Recognition
- 4. Evaluation and Benchmarking
- 5. Discussion and Future Work
-
- 5.1. Analysis and insights
- 5.2. Data augmentation
- 5.3. Video domain adaptation
- 5.4. Neural architecture search
- 5.5. Efficient model development
- 5.6. New datasets
- 5.7. Video adversarial attack
- 5.8. Zero-shot action recognition
- 5.9. Weakly-supervised video action recognition
- 5.10. Fine-grained video action recognition
- 5.11. Egocentric action recognition
- 5.12. Multi-modality
- 5.13. Self-supervised video representation learning
- 6. Conclusion
- 参考
A Comprehensive Study of Deep Video Action Recognition
Yi Zhu, Xinyu Li, Chunhui Liu, Mohammadreza Zolfaghari, Yuanjun Xiong,
Chongruo Wu, Zhi Zhang, Joseph Tighe, R. Manmatha, Mu Li
Amazon Web Services
{yzaws,xxnl,chunhliu,mozolf,yuanjx,chongrwu,zhiz,tighej,manmatha,mli}@amazon.com
Abstract
Video action recognition is one of the representative tasks for video understanding. Over the last decade, we have witnessed great advancements in video action recognition thanks to the emergence of deep learning. But we also encountered new challenges, including modeling long-range temporal information in videos, high computation costs, and incomparable results due to datasets and evaluation protocol variances. In this paper, we provide a comprehensive survey of over 200 existing papers on deep learning for video action recognition. We first introduce the 17 video action recognition datasets that influenced the design of models. Then we present video action recognition models in chronological order: starting with early attempts at adapting deep learning, then to the two-stream networks, followed by the adoption of 3D convolutional kernels, and finally to the recent compute-efficient models. In addition, we benchmark popular methods on several representative datasets and release code for reproducibility. In the end, we discuss open problems and shed light on opportunities for video action recognition to facilitate new research ideas.
视频动作识别是视频理解的代表性课题之一。在过去的十年中,由于深度学习的出现,我们见证了视频动作识别的巨大进步。但我们也遇到了新的挑战,包括在视频中建模远程时间信息,高计算成本,以及由于数据集和评估协议的差异而导致的不可比较的结果。在这篇论文中,我们提供了一个全面的调查超过200篇现有的深度学习视频动作识别的论文。我们首先介绍了影响模型设计的17个视频动作识别数据集。然后,我们按时间顺序介绍视频动作识别模型:从早期适应深度学习的尝试开始,然后是双流网络,然后是采用3D卷积核,最后是最近的计算效率模型。此外,我们在几个有代表性的数据集和发布代码上对流行的方法进行了基准测试,以提高可重复性。最后,我们讨论了视频动作识别的开放问题,并阐明了视频动作识别的机会,以促进新的研究思路。
1. Introduction
One of the most important tasks in video understanding is to understand human actions. It has many real-world applications, including behavior analysis, video retrieval, human-robot interaction, gaming, and entertainment. Human action understanding involves recognizing, localizing, and predicting human behaviors. The task to recognize human actions in a video is called video action recognition. In Figure 1, we visualize several video frames with the associated action labels, which are typical human daily activities such as shaking hands and riding a bike.
理解人的动作是视频理解中最重要的任务之一。它在现实世界中有许多应用,包括行为分析、视频检索、人机交互、游戏和娱乐。对人类行为的理解包括识别、定位和预测人类行为。在视频中识别人类动作的任务称为视频动作识别。在图1中,我们可视化了几个带有相关动作标签的视频帧,这些动作标签是典型的人类日常活动,如握手和骑自行车。
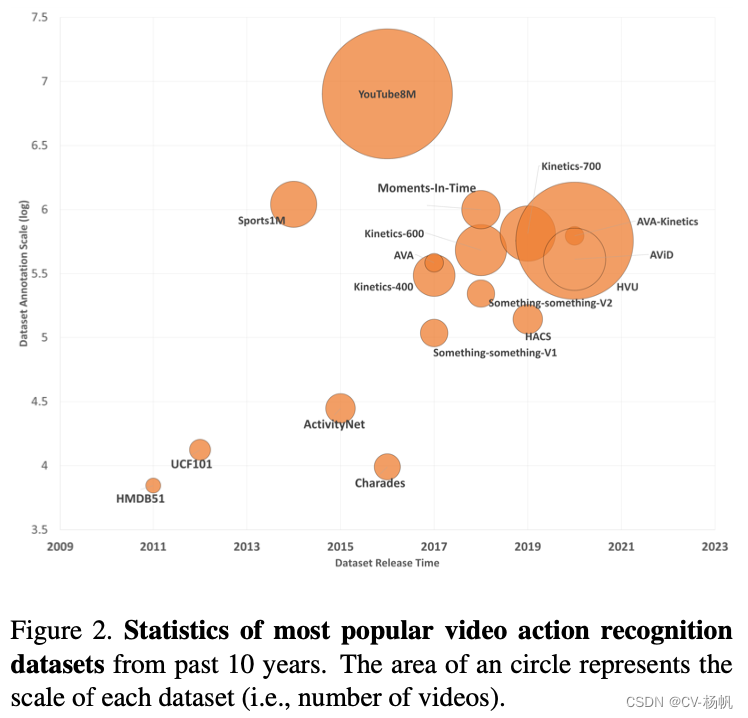
Over the last decade, there has been growing research interest in video action recognition with the emergence of high-quality large-scale action recognition datasets. We summarize the statistics of popular action recognition datasets in Figure 2. We see that both the number of videos and classes increase rapidly, e.g, from 7K videos over 51 classes in HMDB51 [109] to 8M videos over 3, 862 classes in YouTube8M [1]. Also, the rate at which new datasets are released is increasing: 3 datasets were released from 2011 to 2015 compared to 13 released from 2016 to 2020.
在过去的十年中,随着高质量的大规模动作识别数据集的出现,人们对视频动作识别的研究兴趣日益浓厚。我们在图2中总结了流行的动作识别数据集的统计数据。我们看到视频和课程的数量都在快速增长,例如,从HMDB51[109]中的51个课程上的7K视频到YouTube8M[1]中的3862个课程上的8M视频。此外,新数据集发布的速度也在增加:2011年至2015年发布了3个数据集,而2016年至2020年发布了13个数据集。
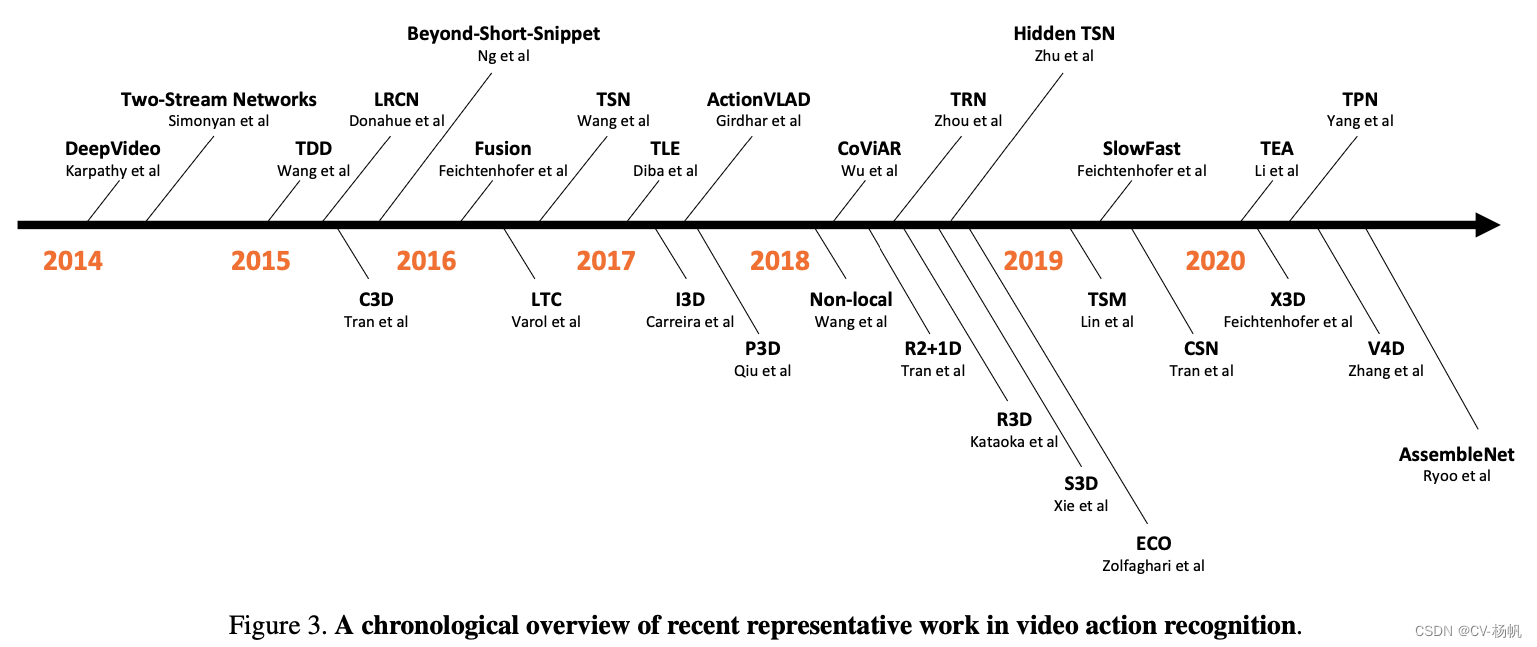
Thanks to both the availability of large-scale datasets and the rapid progress in deep learning, there is also a rapid growth in deep learning based models to recognize video actions. In Figure 3, we present a chronological overview of recent representative work. DeepVideo [99] is one of the earliest attempts to apply convolutional neural networks to videos. We observed three trends here. The first trend started by the seminal paper on Two-Stream Networks [187], adds a second path to learn the temporal information in a video by training a convolutional neural network on the optical flow stream. Its great success inspired a large number of follow-up papers, such as TDD [214], LRCN [37], Fusion [50], TSN [218], etc. The second trend was the use of 3D convolutional kernels to model video temporal information, such as I3D [14], R3D [74], S3D [239], Non-local [219], SlowFast [45], etc. Finally, the third trend focused on computational efficiency to scale to even larger datasets so that they could be adopted in real applications. Examples include Hidden TSN [278], TSM [128], X3D [44], TVN [161], etc.
得益于大规模数据集的可用性和深度学习的快速发展,基于深度学习的视频动作识别模型也得到了快速发展。在图3中,我们按时间顺序概述了最近的代表性作品。DeepVideo[99]是最早将卷积神经网络应用于视频的尝试之一。我们观察到三个趋势。第一个趋势是由关于双流网络的开创性论文[187]开始的,增加了第二条路径,通过在光流流上训练卷积神经网络来学习视频中的时间信息。它的巨大成功启发了大量后续的论文,如TDD [214], LRCN [37], Fusion [50], TSN[218]等。第二个趋势是使用3D卷积核对视频时间信息建模,如I3D[14]、R3D[74]、S3D[239]、Non-local[219]、SlowFast[45]等。最后,第三个趋势专注于计算效率,以扩展到更大的数据集,以便它们可以在实际应用中采用。示例包括隐藏TSN[278]、TSM[128]、X3D[44]、TVN[161]等。
Despite the large number of deep learning based models for video action recognition, there is no comprehensive survey dedicated to these models. Previous survey papers either put more efforts into hand-crafted features [77, 173] or focus on broader topics such as video captioning [236], video prediction [104], video action detection [261] and zero-shot video action recognition [96]. In this paper:
尽管有大量基于深度学习的视频动作识别模型,但还没有针对这些模型的全面研究。以前的调查论文要么把更多的精力放在手工制作的功能上[77,173],要么关注更广泛的主题,如视频字幕[236]、视频预测[104]、视频动作检测[261]和零镜头视频动作识别[96]。在本文中:
We comprehensively review over 200 papers on deep learning for video action recognition. We walk the readers through the recent advancements chronologically and systematically, with popular papers explained in detail.
我们全面审查了200多篇关于深度学习在视频动作识别中的应用的论文。我们将按时间顺序和系统地向读者介绍最近的进展,并对流行论文进行详细解释。
We benchmark widely adopted methods on the same set of datasets in terms of both accuracy and efficiency.We also release our implementations for full reproducibility .
在准确性和效率方面,我们在同一组数据集上对广泛采用的方法进行了基准测试。我们还发布了我们的实现以实现完全的可再现性。
We elaborate on challenges, open problems, and opportunities in this field to facilitate future research.
我们详细阐述了该领域的挑战、开放问题和机遇,以促进未来的研究。
The rest of the survey is organized as following. We first describe popular datasets used for benchmarking and existing challenges in section 2. Then we present recent advancements using deep learning for video action recognition in section 3, which is the major contribution of this survey. In section 4, we evaluate widely adopted approaches on standard benchmark datasets, and provide discussions and future research opportunities in section 5.
调查的其余部分组织如下。我们首先在第2节中描述用于基准测试的流行数据集和现有的挑战。然后,我们在第3部分介绍了使用深度学习进行视频动作识别的最新进展,这是本次调查的主要贡献。在第4节中,我们评估了标准基准数据集上广泛采用的方法,并在第5节中提供了讨论和未来的研究机会。
2. Datasets and Challenges
2.1. Datasets
Deep learning methods usually improve in accuracy when the volume of the training data grows. In the case of video action recognition, this means we need large-scale annotated datasets to learn effective models.
深度学习方法的准确性通常随着训练数据量的增长而提高。在视频动作识别的情况下,这意味着我们需要大规模的带注释的数据集来学习有效的模型。
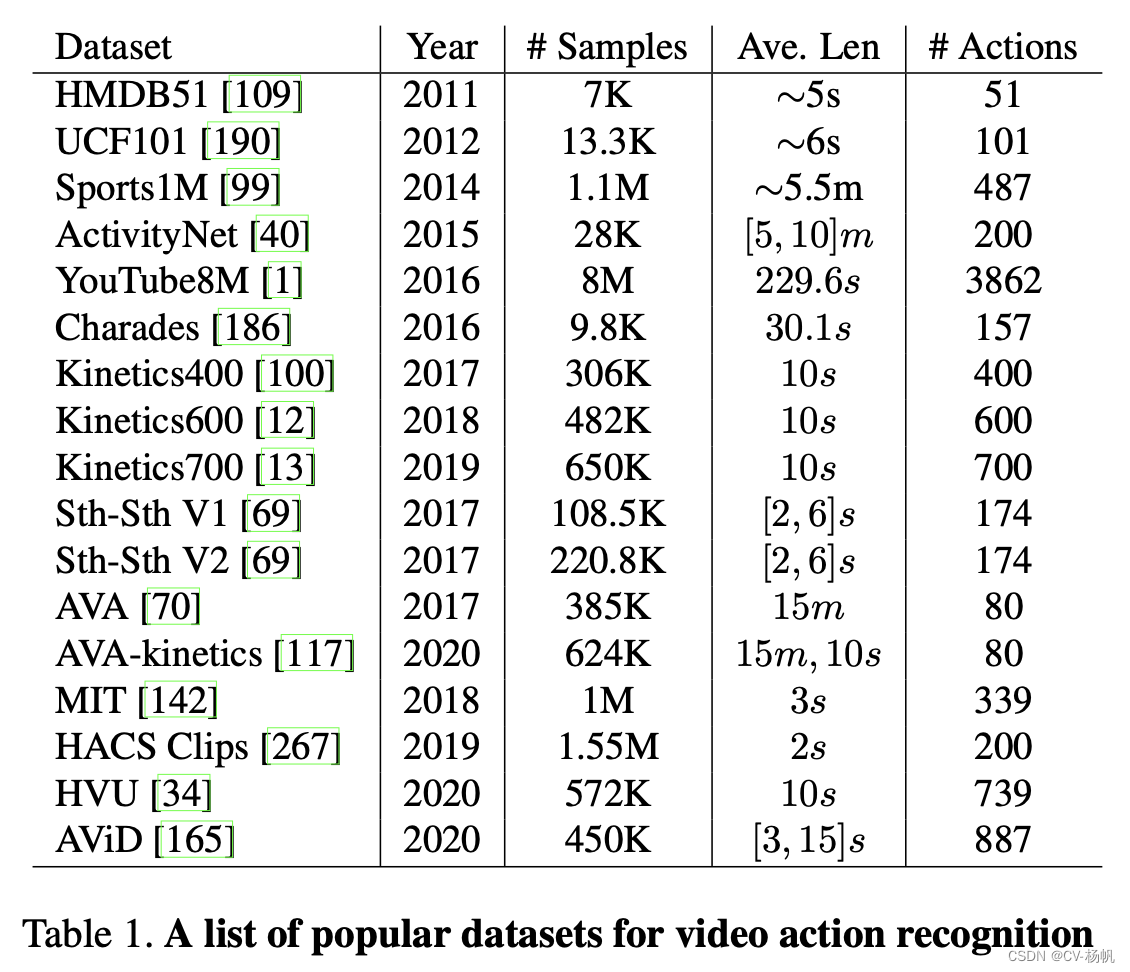
For the task of video action recognition, datasets are often built by the following process: (1) Define an action list, by combining labels from previous action recognition datasets and adding new categories depending on the use case. (2) Obtain videos from various sources, such as YouTube and movies, by matching the video title/subtitle to the action list. (3) Provide temporal annotations manually to indicate the start and end position of the action, and (4) finally clean up the dataset by de-duplication and filtering out noisy classes/samples. Below we review the most popular large-scale video action recognition datasets in Table 1 and Figure 2.
对于视频动作识别任务,数据集通常通过以下过程构建:(1)定义一个动作列表,将之前动作识别数据集中的标签组合起来,并根据用例添加新的类别。(2)通过将视频标题/字幕与动作列表进行匹配,获取各种来源的视频,如YouTube和电影。(3)手动提供时间注释,以指示动作的开始和结束位置。(4)最后通过去重复和过滤噪声类/样本来清理数据集。下面我们回顾表1和图2中最流行的大规模视频动作识别数据集。
HMDB51 [109] was introduced in 2011. It was collected mainly from movies, and a small proportion from public databases such as the Prelinger archive, YouTube and Google videos. The dataset contains 6, 849 clips divided into 51 action categories, each containing a minimum of 101 clips. The dataset has three official splits. Most previous papers either report the top-1 classification accuracy on split 1 or the average accuracy over three splits.
HMDB51[109]于2011年问世。这些数据主要来自电影,还有一小部分来自公共数据库,如普雷林格档案、YouTube和谷歌视频。该数据集包含6,849个剪辑,分为51个动作类别,每个动作类别至少包含101个剪辑。该数据集有三次官方拆分。以前的大多数论文要么报告分裂1的前1分类准确率,要么报告三次分裂的平均准确率。
UCF101 [190] was introduced in 2012 and is an extension of the previous UCF50 dataset. It contains 13,320 videos from YouTube spreading over 101 categories of human actions. The dataset has three official splits similar to HMDB51, and is also evaluated in the same manner.
UCF101[190]于2012年引入,是之前UCF50数据集的扩展。它包含了来自YouTube的13320个视频,传播了101种人类行为。该数据集有三个官方分割,类似于HMDB51,也以相同的方式进行评估。
Sports1M [99] was introduced in 2014 as the first large-scale video action dataset which consisted of more than 1 million YouTube videos annotated with 487 sports classes. The categories are fine-grained which leads to low interclass variations. It has an official 10-fold cross-validation split for evaluation.
Sports1M[99]于2014年推出,是第一个大规模视频动作数据集,由100多万YouTube视频组成,注释了487个体育课程。类别是细粒度的,这导致了类间的低变化。它有一个官方的10倍交叉验证拆分用于评估。
ActivityNet [40] was originally introduced in 2015 and the ActivityNet family has several versions since its initial launch. The most recent ActivityNet 200 (V1.3) contains 200 human daily living actions. It has 10, 024 training, 4, 926 validation, and 5, 044 testing videos. On average there are 137 untrimmed videos per class and 1.41 activity instances per video.
ActivityNet[40]最初于2015年推出,ActivityNet家族自最初推出以来有几个版本。最新的ActivityNet 200 (V1.3)包含200个人类日常生活行为。它有10,024个训练视频、4,926个验证视频和5,044个测试视频。平均而言,每个类有137个未修剪的视频,每个视频有1.41个活动实例。
YouTube8M [1] was introduced in 2016 and is by far the largest-scale video dataset that contains 8 million YouTube videos (500K hours of video in total) and annotated with 3, 862 action classes. Each video is annotated with one or multiple labels by a YouTube video annotation system. This dataset is split into training, validation and test in the ratio 70:20:10. The validation set of this dataset is also extended with human-verified segment annotations to provide temporal localization information.
YouTube8M[1]于2016年推出,是迄今为止规模最大的视频数据集,包含800万YouTube视频(总共50万小时的视频),并注释了3862个动作类。每个视频都由YouTube视频标注系统标注一个或多个标签。该数据集按70:20:10的比例分为训练、验证和测试。该数据集的验证集还扩展了人类验证的段注释,以提供时间定位信息。
Charades [186] was introduced in 2016 as a dataset for real-life concurrent action understanding. It contains 9, 848 videos with an average length of 30 seconds. This dataset includes 157 multi-label daily indoor activities, performed by 267 different people. It has an official train-validation split that has 7, 985 videos for training and the remaining 1, 863 for validation.
2016年,Charades[186]作为一个用于理解现实并发动作的数据集被引入。它包含9848个视频,平均长度为30秒。该数据集包括157项多标签的日常室内活动,由267名不同的人进行。它有一个官方的训练-验证分割,有7985个视频用于训练,剩下的1863个用于验证。
Kinetics Family is now the most widely adopted benchmark. Kinetics400 [100] was introduced in 2017 and it consists of approximately 240k training and 20k validation videos trimmed to 10 seconds from 400 human action categories. The Kinetics family continues to expand, with Kinetics-600 [12] released in 2018 with 480K videos and Kinetics700[13] in 2019 with 650K videos.
Kinetics Family是目前最广泛采用的基准。Kinetics400[100]于2017年推出,由大约240k的训练视频和20k的验证视频组成,从400个人体动作类别中删减到10秒。Kinetics系列继续扩大,2018年发布了Kinetics-600[12],包含480K视频,2019年发布了Kinetics700[13],包含650K视频。
20BN-Something-Something [69] V1 was introduced in 2017 and V2 was introduced in 2018. This family is another popular benchmark that consists of 174 action classes that describe humans performing basic actions with everyday objects. There are 108, 499 videos in V1 and 220, 847 videos in V2. Note that the Something-Something dataset requires strong temporal modeling because most activities cannot be inferred based on spatial features alone (e.g. opening something, covering something with something).
20BN-Something-Something [69] V1于2017年引入,V2于2018年引入。这个系列是另一个流行的基准测试,由174个动作类组成,描述人类对日常物体执行的基本动作。V1中有108,499个视频,V2中有220,847个视频。请注意,something - something数据集需要强大的时间建模,因为大多数活动不能仅根据空间特征推断(例如,打开某物,用某物覆盖某物)。
AVA [70] was introduced in 2017 as the first large-scale spatio-temporal action detection dataset. It contains 430 15-minute video clips with 80 atomic actions labels (only 60 labels were used for evaluation). The annotations were provided at each key-frame which lead to 214, 622 training, 57, 472 validation and 120, 322 testing samples. The AVA dataset was recently expanded to AVA-Kinetics with 352,091 training, 89,882 validation and 182,457 testing samples [117].
AVA[70]于2017年问世,是首个大规模时空动作检测数据集。它包含430个15分钟的视频剪辑,带有80个原子动作标签(只有60个标签用于评估)。在每个关键帧上提供注释,得到214 622个训练,57 472个验证和120 322个测试样本。AVA数据集最近扩展到AVA- kinetics,包含352091个训练、89,882个验证和182,457个测试样本[117]。
Moments in Time [142] was introduced in 2018 and it is a large-scale dataset designed for event understanding. It contains one million 3 second video clips, annotated with a dictionary of 339 classes. Different from other datasets designed for human action understanding, Moments in Time dataset involves people, animals, objects and natural phenomena. The dataset was extended to Multi-Moments in Time (M-MiT) [143] in 2019 by increasing the number of videos to 1.02 million, pruning vague classes, and increasing the number of labels per video.
Moments in Time[142]于2018年引入,是一个旨在理解事件的大规模数据集。它包含100万个3秒的视频片段,用339个类的字典注释。不同于其他为理解人类行为而设计的数据集,瞬间数据集包括人、动物、物体和自然现象。2019年,该数据集扩展到Multi-Moments in Time (M-MiT)[143],将视频数量增加到102万,修剪模糊类,并增加每个视频的标签数量。
HACS [267] was introduced in 2019 as a new large-scale dataset for recognition and localization of human actions collected from Web videos. It consists of two kinds of manual annotations. HACS Clips contains 1.55M 2-second clip annotations on 504K videos, and HACS Segments has 140K complete action segments (from action start to end) on 50K videos. The videos are annotated with the same 200 human action classes used in ActivityNet (V1.3) [40].
HACS[267]是一种新的大规模数据集,用于从网络视频中收集人类行为的识别和定位。它由两种手工注释组成。HACS剪辑包含1.55M 2秒剪辑注释504K视频,HACS片段有140K完整的动作片段(从动作开始到结束)50K视频。这些视频使用ActivityNet (V1.3)[40]中使用的200个人类动作类进行注释。
HVU [34] dataset was released in 2020 for multi-label multi-task video understanding. This dataset has 572K videos and 3, 142 labels. The official split has 481K, 31K and 65K videos for train, validation, and test respectively. This dataset has six task categories: scene, object, action, event, attribute, and concept. On average, there are about 2, 112 samples for each label. The duration of the videos varies with a maximum length of 10 seconds.
HVU[34]数据集于2020年发布,用于多标签多任务视频理解。这个数据集有572K个视频和3142个标签。官方拆分有481K、31K和65K视频分别用于训练、验证和测试。这个数据集有六个任务类别:场景、对象、动作、事件、属性和概念。平均而言,每个标签大约有2112个样品。视频时长各不相同,最长10秒。
AViD [165] was introduced in 2020 as a dataset for anonymized action recognition. It contains 410K videos for training and 40K videos for testing. Each video clip duration is between 3-15 seconds and in total it has 887 action classes. During data collection, the authors tried to collect data from various countries to deal with data bias. They also remove face identities to protect privacy of video makers. Therefore, AViD dataset might not be a proper choice for recognizing face-related actions.
AViD[165]于2020年推出,作为匿名动作识别的数据集。它包含410K的训练视频和40K的测试视频。每个视频剪辑的时长在3-15秒之间,总共有887个动作类。在数据收集过程中,作者试图收集不同国家的数据,以处理数据偏差。为了保护视频制作者的隐私,他们还删除了面部身份。因此,AViD数据集可能不是识别人脸相关动作的合适选择。
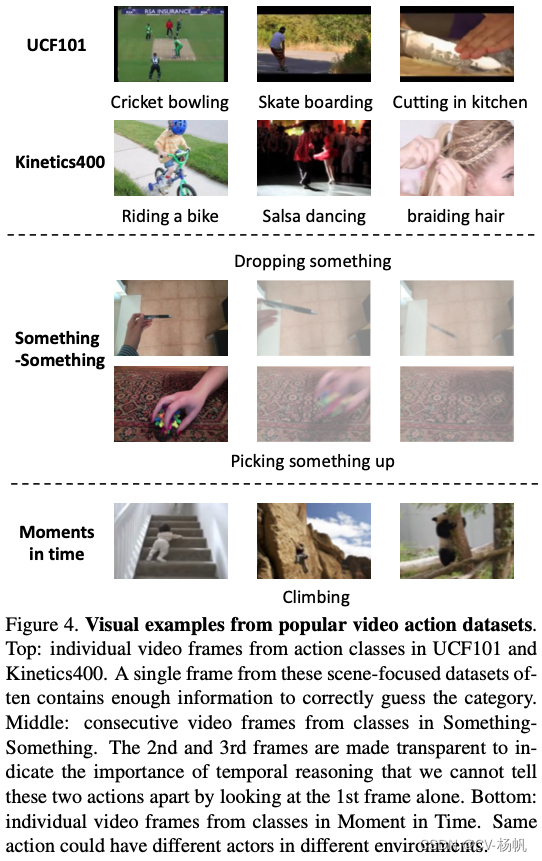
Figure 4. Visual examples from popular video action datasets.
Top: individual video frames from action classes in UCF101 and Kinetics400. A single frame from these scene-focused datasets often contains enough information to correctly guess the category. Middle: consecutive video frames from classes in Something-Something. The 2nd and 3rd frames are made transparent to indicate the importance of temporal reasoning that we cannot tell these two actions apart by looking at the 1st frame alone. Bottom: individual video frames from classes in Moment in Time. Same action could have different actors in different environments.图4。来自流行视频动作数据集的可视化示例。
上图:UCF101和Kinetics400中动作类的独立视频帧。来自这些以场景为中心的数据集的单个帧通常包含足够的信息来正确猜测类别。中间:来自某某类的连续视频帧。第二帧和第三帧是透明的,以表明时间推理的重要性,我们不能通过单独看第一帧来区分这两个行为。底部:来自“时刻”中的各个类的单独视频帧。相同的动作在不同的环境中可能有不同的参与者。
Before we dive into the chronological review of methods, we present several visual examples from the above datasets in Figure 4 to show their different characteristics. In the top two rows, we pick action classes from UCF101 [190] and Kinetics400 [100] datasets. Interestingly, we find that these actions can sometimes be determined by the context or scene alone. For example, the model can predict the action riding a bike as long as it recognizes a bike in the video frame. The model may also predict the action cricket bowling if it recognizes the cricket pitch. Hence for these classes, video action recognition may become an object/scene classification problem without the need of reasoning motion/temporal information. In the middle two rows, we pick action classes from Something-Something dataset [69]. This dataset focuses on human-object interaction, thus it is more fine-grained and requires strong temporal modeling. For example, if we only look at the first frame of dropping something and picking something up without looking at other video frames, it is impossible to tell these two actions apart. In the bottom row, we pick action classes from Moments in Time dataset [142]. This dataset is different from most video action recognition datasets, and is designed to have large inter-class and intra-class variation that represent dynamical events at different levels of abstraction. For example, the action climbing can have different actors (person or animal) in different environments (stairs or tree).
在按时间顺序回顾这些方法之前,我们在图4中展示了上述数据集中的几个可视化示例,以展示它们的不同特征。在前两行中,我们从UCF101[190]和Kinetics400[100]数据集中选择动作类。有趣的是,我们发现这些行为有时只取决于情境或场景。例如,只要模型识别出视频帧中的自行车,它就可以预测骑自行车的动作。该模型在识别板球场地的情况下,也可以预测板球运动。因此,对于这些类来说,视频动作识别可能成为一个不需要推理运动/时间信息的目标/场景分类问题。在中间的两行中,我们从Something-Something数据集[69]中选择动作类。该数据集关注人-物交互,因此粒度更细,需要强大的时间建模。例如,如果我们只看扔东西和捡东西的第一帧而不看其他视频帧,就不可能区分这两个动作。在最下面一行,我们从Moments In Time数据集[142]中选择动作类。该数据集不同于大多数视频动作识别数据集,设计为具有较大的类间和类内变化,代表不同抽象级别的动态事件。例如,动作攀爬可以有不同的演员(人或动物)在不同的环境(楼梯或树)。
2.2. Challenges
There are several major challenges in developing effective video action recognition algorithms.
In terms of dataset, first, defining the label space for training action recognition models is non-trivial. It’s because human actions are usually composite concepts and the hierarchy of these concepts are not well-defined. Second, annotating videos for action recognition are laborious (e.g., need to watch all the video frames) and ambiguous (e.g, hard to determine the exact start and end of an action). Third, some popular benchmark datasets (e.g., Kinetics family) only release the video links for users to download and not the actual video, which leads to a situation that methods are evaluated on different data. It is impossible to do fair comparisons between methods and gain insights.
在数据集方面,首先,为训练动作识别模型定义标签空间是非常重要的。这是因为人类行为通常是复合概念,这些概念的层次结构并没有很好的定义。其次,为动作识别标注视频是费力的(例如,需要观看所有的视频帧)和模糊的(例如,难以确定动作的确切开始和结束)。第三,一些流行的基准数据集(例如,Kinetics家族)只发布视频链接供用户下载,而不发布实际的视频,这导致了一种情况,方法是在不同的数据上评估。不可能在方法之间进行公平的比较并获得深刻的见解。
In terms of modeling, first, videos capturing human actions have both strong intra- and inter-class variations. People can perform the same action in different speeds under various viewpoints. Besides, some actions share similar movement patterns that are hard to distinguish. Second, recognizing human actions requires simultaneous understanding of both short-term action-specific motion information and long-range temporal information. We might need a sophisticated model to handle different perspectives rather than using a single convolutional neural network. Third, the computational cost is high for both training and inference, hindering both the development and deployment of action recognition models. In the next section, we will demonstrate how video action recognition methods developed over the last decade to address the aforementioned challenges.
在建模方面,首先,捕捉人类行为的视频具有很强的类内和类间变异。人们可以在不同的视点下以不同的速度执行相同的动作。此外,有些动作有着相似的运动模式,很难区分。其次,识别人类行为需要同时理解特定于动作的短期运动信息和长期时间信息。我们可能需要一个复杂的模型来处理不同的视角,而不是使用单一的卷积神经网络。第三,训练和推理的计算成本都很高,阻碍了动作识别模型的开发和部署。在下一节中,我们将演示视频动作识别方法是如何在过去十年中发展起来的,以解决上述挑战。
3. An Odyssey of Using Deep Learning for Video Action Recognition
In this section, we review deep learning based methods for video action recognition from 2014 to present and introduce the related earlier work in context.
在本节中,我们将回顾从2014年开始的基于深度学习的视频动作识别方法,以呈现和介绍相关的早期工作。
3.1. From hand-crafted features to CNNs
Despite there being some papers using Convolutional Neural Networks (CNNs) for video action recognition, [200, 5, 91], hand-crafted features [209, 210, 158, 112], particularly Improved Dense Trajectories (IDT) [210], dominated the video understanding literature before 2015, due to their high accuracy and good robustness. However, handcrafted features have heavy computational cost [244], and are hard to scale and deploy.
尽管有一些论文使用卷积神经网络(CNN)进行视频动作识别,[200,5,91],手工制作的特征[209,210,158,112],特别是改进的密集轨迹(IDT)[210],由于其高精度和良好的鲁棒性,在2015年之前主导了视频理解文献。但是,手工制作的功能具有很高的计算成本[244],并且难以扩展和部署。
With the rise of deep learning [107], researchers started to adapt CNNs for video problems. The seminal work DeepVideo [99] proposed to use a single 2D CNN model on each video frame independently and investigated several temporal connectivity patterns to learn spatio-temporal features for video action recognition, such as late fusion, early fusion and slow fusion. Though this model made early progress with ideas that would prove to be useful later such as a multi-resolution network, its transfer learning performance on UCF101 [190] was 20% less than hand-crafted IDT features (65.4% vs 87.9%). Furthermore, DeepVideo [99] found that a network fed by individual video frames, performs equally well when the input is changed to a stack of frames. This observation might indicate that the learnt spatio-temporal features did not capture the motion well. It also encouraged people to think about why CNN models did not outperform traditional hand-crafted features in the video domain unlike in other computer vision tasks [107, 171].
随着深度学习的兴起[107],研究人员开始使CNN适应视频问题。开创性的工作DeepVideo [99]建议在每个视频帧上独立使用单个2D CNN模型,并研究了几种时间连接模式来学习视频动作识别的时空特征,例如后期融合,早期融合和慢融合。虽然该模型在多分辨率网络等后来被证明是有用的想法方面取得了早期进展,但它在UCF101 [190]上的迁移学习性能比手工制作的IDT特征低20%(65.4%对87.9%)。此外,DeepVideo [99]发现,当输入更改为帧堆栈时,由单个视频帧馈送的网络表现同样出色。这一观察结果可能表明,所学的时空特征没有很好地捕捉到运动。它还鼓励人们思考为什么CNN模型在视频领域的表现不如其他计算机视觉任务的传统手工制作功能[107,171]。
3.2. Two-stream networks
Since video understanding intuitively needs motion information, finding an appropriate way to describe the temporal relationship between frames is essential to improving the performance of CNN-based video action recognition.
由于视频理解直观地需要运动信息,找到一种合适的方法来描述帧间的时间关系对于提高基于cnn的视频动作识别的性能至关重要。
Optical flow [79] is an effective motion representation to describe object/scene movement. To be precise, it is the pattern of apparent motion of objects, surfaces, and edges in a visual scene caused by the relative motion between an observer and a scene. We show several visualizations of optical flow in Figure 5. As we can see, optical flow is able to describe the motion pattern of each action accurately. The advantage of using optical flow is it provides orthogonal information compared to the the RGB image. For example, the two images on the bottom of Figure 5 have cluttered backgrounds. Optical flow can effectively remove the nonmoving background and result in a simpler learning problem compared to using the original RGB images as input.
光流[79]是描述物体/场景运动的一种有效的运动表示方法。准确地说,它是由观察者与场景之间的相对运动所引起的视觉场景中物体、表面和边缘的视运动模式。我们在图5中展示了光流的几个可视化图。我们可以看到,光流能够准确地描述每个动作的运动模式。使用光流的优点是,与RGB图像相比,它提供了正交的信息。例如,图5底部的两张图片,背景就比较杂乱。光流可以有效地去除不移动的背景,与使用原始RGB图像作为输入相比,会产生更简单的学习问题。
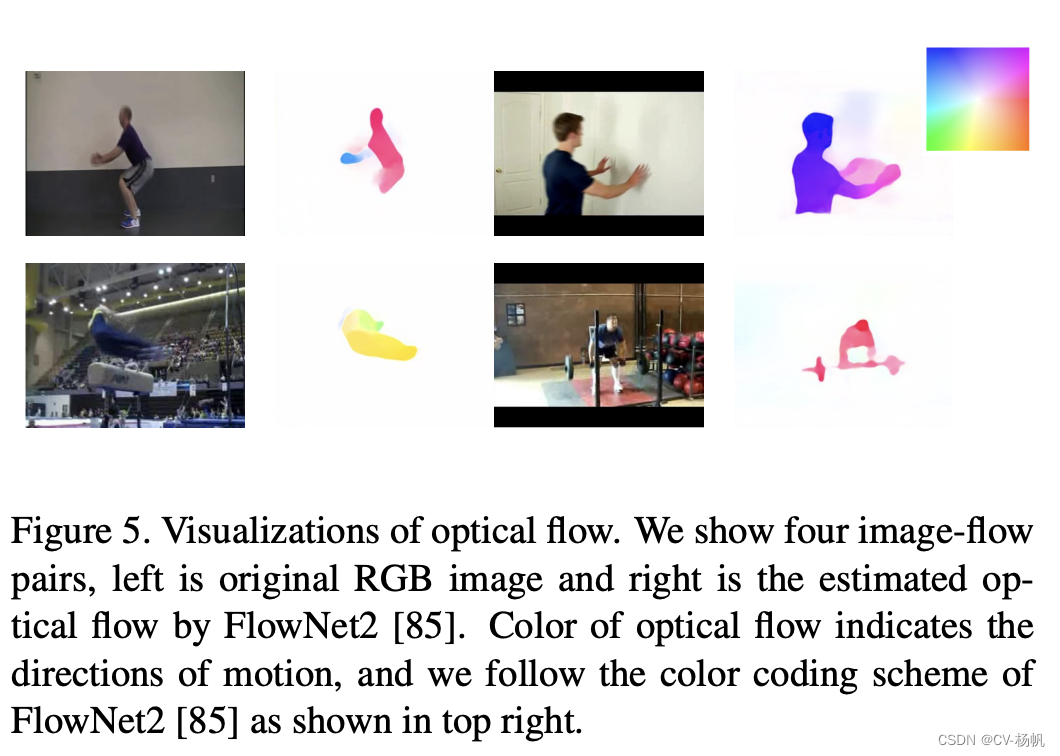
Figure 5. Visualizations of optical flow. We show four image-flow pairs, left is original RGB image and right is the estimated optical flow by FlowNet2 [85]. Color of optical flow indicates the directions of motion, and we follow the color coding scheme of FlowNet2 [85] as shown in top right.
图5。光流的可视化。我们展示了四组图像流对,左边是原始RGB图像,右边是FlowNet2估计的光流[85]。光流的颜色表示运动方向,我们遵循FlowNet2[85]的颜色编码方案如右上所示。
In addition, optical flow has been shown to work well on video problems. Traditional hand-crafted features such as IDT [210] also contain optical-flow-like features, such as Histogram of Optical Flow (HOF) and Motion Boundary Histogram (MBH).
此外,光流已被证明在视频问题上工作得很好。传统手工制作的特征,如IDT[210]也包含类似光流的特征,如光流直方图(Histogram of Optical Flow, HOF)和运动边界直方图(Motion Boundary Histogram, MBH)。
Hence, Simonyan et al. [187] proposed two-stream networks, which included a spatial stream and a temporal stream as shown in Figure 6. This method is related to the two-streams hypothesis [65], according to which the human visual cortex contains two pathways: the ventral stream (which performs object recognition) and the dorsal stream (which recognizes motion). The spatial stream takes raw video frame(s) as input to capture visual appearance information. The temporal stream takes a stack of optical flow images as input to capture motion information between video frames. To be specific, [187] linearly rescaled the horizontal and vertical components of the estimated flow (i.e., motion in the x-direction and y-direction) to a [0, 255] range and compressed using JPEG. The output corresponds to the two optical flow images shown in Figure 6. The compressed optical flow images will then be concatenated as the input to the temporal stream with a dimension of H×W×2L, where H, W and L indicates the height, width and the length of the video frames. In the end, the final prediction is obtained by averaging the prediction scores from both streams.
因此,Simonyan等[187]提出了两流网络,包括一个空间流和一个时间流,如图6所示。这种方法与双流假说(two-streams hypothesis)有关[65],根据该假说,人类视觉皮层包含两条通路:腹侧流(执行物体识别)和背侧流(识别运动)。空间流以原始视频帧(s)为输入,捕获视觉外观信息。时间流以一堆光流图像作为输入,捕获视频帧之间的运动信息。具体来说,[187]将估计流的水平和垂直分量(即x方向和y方向的运动)线性缩放到[0,255]范围,并使用JPEG进行压缩。输出对应于图6所示的两张光流图像。然后将压缩后的光流图像拼接成维度为H×W×2L的时间流的输入,其中H、W和L分别表示视频帧的高度、宽度和长度。最后,将两个流的预测分数取平均值得到最终的预测结果。
By adding the extra temporal stream, for the first time, a CNN-based approach achieved performance similar to the previous best hand-crafted feature IDT on UCF101 (88.0% vs 87.9%) and on HMDB51 [109] (59.4% vs 61.1%). [187] makes two important observations. First, motion information is important for video action recognition. Second, it is still challenging for CNNs to learn temporal information directly from raw video frames. Pre-computing optical flow as the motion representation is an effective way for deep learning to reveal its power. Since [187] managed to close the gap between deep learning approaches and traditional hand-crafted features, many follow-up papers on twostream networks emerged and greatly advanced the development of video action recognition. Here, we divide them into several categories and review them individually.
通过首次添加额外的时间流,基于cnn的方法获得了类似于之前在UCF101 (88.0% vs 87.9%)和HMDB51 [109] (59.4% vs 61.1%)上的最佳手工特性IDT的性能。[187]做了两个重要的观察。首先,运动信息对视频动作识别很重要。其次,对于cnn来说,直接从原始视频帧中学习时间信息仍然具有挑战性。预计算光流作为运动表示是深度学习展示其威力的有效途径。自从[187]成功地缩小了深度学习方法和传统手工特征之间的差距以来,许多关于双流网络的后续论文出现了,极大地推动了视频动作识别的发展。在这里,我们将它们分为几个类别并分别进行回顾。
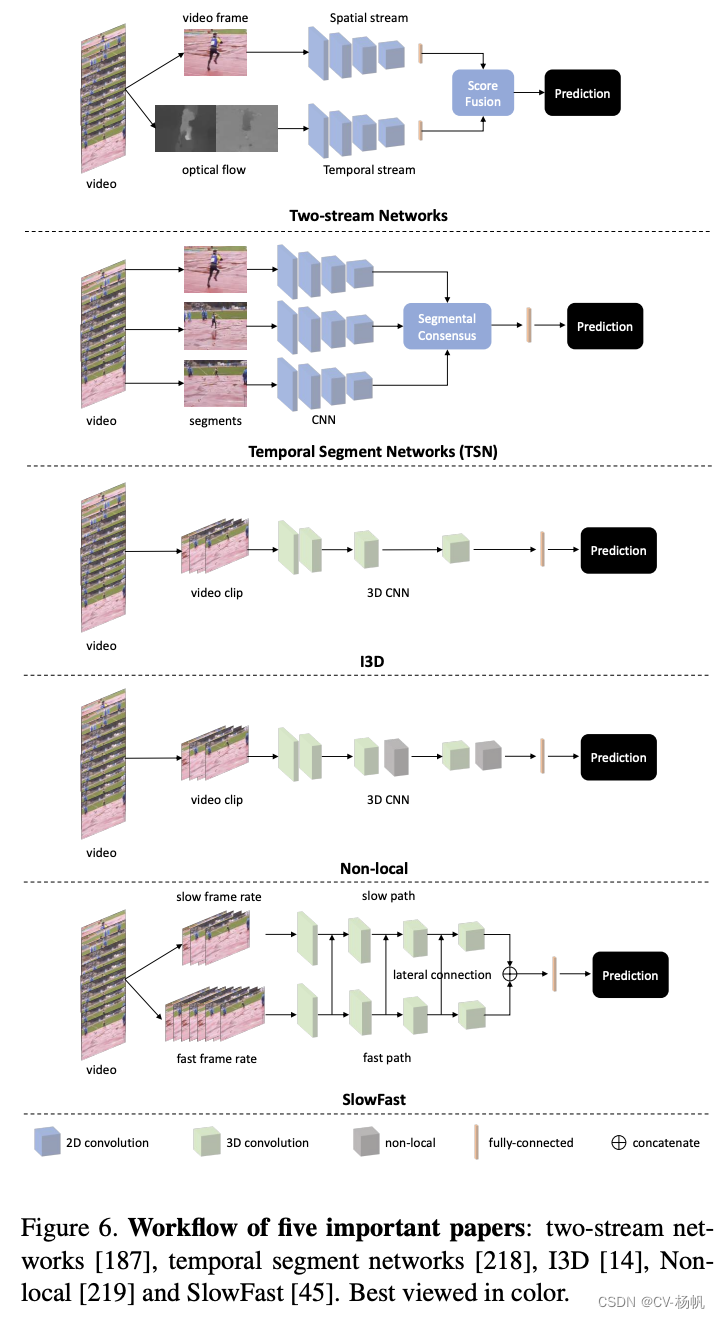
Figure 6. Workflow of five important papers: two-stream networks [187], temporal segment networks [218], I3D [14], Nonlocal [219] and SlowFast [45]. Best viewed in color.
图6。五篇重要论文的工作流程:双流网络[187],时间段网络[218],I3D [14], Nonlocal[219]和SlowFast[45]。最好用彩色观看。
3.2.1 Using deeper network architectures
Two-stream networks [187] used a relatively shallow network architecture [107]. Thus a natural extension to the two-stream networks involves using deeper networks. However, Wang et al. [215] finds that simply using deeper networks does not yield better results, possibly due to overfitting on the small-sized video datasets [190, 109]. Recall from section 2.1, UCF101 and HMDB51 datasets only have thousands of training videos. Hence, Wang et al. [217] introduce a series of good practices, including crossmodality initialization, synchronized batch normalization, corner cropping and multi-scale cropping data augmentation, large dropout ratio, etc. to prevent deeper networks from overfitting. With these good practices, [217] was able to train a two-stream network with the VGG16 model [188] that outperforms [187] by a large margin on UCF101. These good practices have been widely adopted and are still being used. Later, Temporal Segment Networks (TSN) [218] performed a thorough investigation of network architectures, such as VGG16, ResNet [76], Inception [198], and demonstrated that deeper networks usually achieve higher recognition accuracy for video action recognition. We will describe more details about TSN in section 3.2.4.
双流网络[187]采用了相对较浅的网络架构[107]。因此,对双流网络的自然扩展涉及到使用更深层次的网络。然而,Wang等人[215]发现,简单地使用更深的网络并不能产生更好的结果,这可能是由于对小型视频数据集的过拟合[190,109]。回顾2.1节,UCF101和HMDB51数据集只有数千个训练视频。因此,Wang等人[217]引入了一系列好的实践,包括跨模态初始化、同步批处理归一化、拐角裁剪和多尺度裁剪数据增强、大dropout率等,以防止更深层次的网络过拟合。有了这些良好的实践,[217]能够用VGG16模型[188]训练一个双流网络,其性能大大优于UCF101[187]。这些良好实践已被广泛采用,并仍在使用。后来,时间段网络(TSN)[218]对VGG16、ResNet[76]、Inception[198]等网络架构进行了深入研究,并证明更深层次的网络通常可以实现更高的视频动作识别精度。我们将在3.2.4节中详细描述TSN。
3.2.2 Two-stream fusion
Since there are two streams in a two-stream network, there will be a stage that needs to merge the results from both networks to obtain the final prediction. This stage is usually referred to as the spatial-temporal fusion step.
由于在一个两流网络中有两个流,将会有一个阶段需要合并来自两个网络的结果,以获得最终的预测。这一阶段通常被称为时空融合步骤。
The easiest and most straightforward way is late fusion, which performs a weighted average of predictions from both streams. Despite late fusion being widely adopted [187, 217], many researchers claim that this may not be the optimal way to fuse the information between the spatial appearance stream and temporal motion stream. They believe that earlier interactions between the two networks could benefit both streams during model learning and this is termed as early fusion.
最简单、最直接的方法是后期融合,它对来自两种流的预测进行加权平均。尽管后期融合被广泛采用[187,217],但许多研究者认为这可能不是融合空间外观流和时间运动流之间信息的最佳方式。他们认为,在模型学习过程中,两个网络之间的早期交互可以使两种流都受益,这被称为早期融合。
Fusion [50] is one of the first of several papers investigating the early fusion paradigm, including how to perform spatial fusion (e.g., using operators such as sum, max, bilinear, convolution and concatenation), where to fuse the network (e.g., the network layer where early interactions happen), and how to perform temporal fusion (e.g., using 2D or 3D convolutional fusion in later stages of the network). [50] shows that early fusion is beneficial for both streams to learn richer features and leads to improved performance over late fusion. Following this line of research, Feichtenhofer et al. [46] generalizes ResNet [76] to the spatiotemporal domain by introducing residual connections between the two streams. Based on [46], Feichtenhofer et al. [47] further propose a multiplicative gating function for residual networks to learn better spatio-temporal features. Concurrently, [225] adopts a spatio-temporal pyramid to perform hierarchical early fusion between the two streams.
融合[50]是研究早期融合范式的几篇论文中的第一篇,包括如何执行空间融合(例如,使用运算符如和、最大、双线性、卷积和拼接),在哪里融合网络(例如,发生早期交互的网络层),以及如何执行时间融合(例如,在网络的后期使用2D或3D卷积融合)。[50]表明,早期的融合有利于两个流学习更丰富的特性,并导致比后期融合更好的性能。遵循这一研究路线,Feichtenhofer等人[46]通过引入两个流之间的残余连接,将ResNet[76]推广到时空域。Feichtenhofer等[47]在[46]的基础上进一步提出了残差网络的乘法门控函数,以更好地学习时空特征。同时,[225]采用时空金字塔在两个流之间进行分层早期融合。
3.2.3 Recurrent neural networks
Since a video is essentially a temporal sequence, researchers have explored Recurrent Neural Networks (RNNs) for temporal modeling inside a video, particularly the usage of Long Short-Term Memory (LSTM) [78].
由于视频本质上是一个时间序列,研究人员探索了循环神经网络(rnn)在视频中进行时间建模,特别是使用长短期记忆(LSTM)[78]。
LRCN [37] and Beyond-Short-Snippets [253] are the first of several papers that use LSTM for video action recognition under the two-stream networks setting. They take the feature maps from CNNs as an input to a deep LSTM network, and aggregate frame-level CNN features into videolevel predictions. Note that they use LSTM on two streams separately, and the final results are still obtained by late fusion. However, there is no clear empirical improvement from LSTM models [253] over the two-stream baseline [187]. Following the CNN-LSTM framework, several variants are proposed, such as bi-directional LSTM [205], CNN-LSTM fusion [56] and hierarchical multi-granularity LSTM network [118]. [125] described VideoLSTM which includes a correlation-based spatial attention mechanism and a lightweight motion-based attention mechanism. VideoLSTM not only show improved results on action recognition, but also demonstrate how the learned attention can be used for action localization by relying on just the action class label. Lattice-LSTM [196] extends LSTM by learning independent hidden state transitions of memory cells for individual spatial locations, so that it can accurately model long-term and complex motions. ShuttleNet [183] is a concurrent work that considers both feedforward and feedback connections in a RNN to learn long-term dependencies. FASTER [272] designed a FAST-GRU to aggregate clip-level features from an expensive backbone and a cheap backbone. This strategy reduces the processing cost of redundant clips and hence accelerates the inference speed.
LRCN[37]和Beyond-Short-Snippets[253]是在双流网络设置下使用LSTM进行视频动作识别的几篇论文中的第一篇。他们将CNN的特征图作为深度LSTM网络的输入,并将帧级CNN特征聚合为视频级预测。注意,他们分别在两个流上使用LSTM,最终结果仍然是通过后期融合获得的。然而,相比双流基线[187],LSTM模型[253]并没有明显的经验改进。在CNN-LSTM框架的基础上,提出了几种变体,如双向LSTM[205]、CNN-LSTM融合[56]和分层多粒度LSTM网络[118]。[125]描述了包括基于相关的空间注意机制和基于轻量运动的注意机制的VideoLSTM。VideoLSTM不仅展示了动作识别的改进结果,而且还展示了如何仅依靠动作类标签将习得的注意力用于动作定位。晶格-LSTM[196]通过学习单个空间位置的记忆单元的独立隐藏状态跃迁来扩展LSTM,从而能够准确地模拟长期和复杂的运动。ShuttleNet[183]是一项并行工作,它考虑了RNN中的前馈和反馈连接,以学习长期依赖关系。FASTER[272]设计了一种FAST-GRU来聚合来自昂贵主干和廉价主干的剪辑级特征。该策略降低了冗余片段的处理成本,从而提高了推理速度。
However, the work mentioned above [37, 253, 125, 196, 183] use different two-stream networks/backbones. The differences between various methods using RNNs are thus unclear. Ma et al. [135] build a strong baseline for fair comparison and thoroughly study the effect of learning spatiotemporal features by using RNNs. They find that it requires proper care to achieve improved performance, e.g., LSTMs require pre-segmented data to fully exploit the temporal information. RNNs are also intensively studied in video action localization [189] and video question answering [274], but these are beyond the scope of this survey.
然而,上面提到的工作[37,253,125,196,183]使用不同的双流网络/骨干。因此,使用rnn的各种方法之间的区别还不清楚。Ma等人[135]为公平比较建立了一个强有力的基线,并深入研究了使用rnn学习时空特征的效果。他们发现需要适当的关注来实现改进的性能,例如,LSTMs需要预先分割的数据来充分利用时间信息。rnn在视频动作定位[189]和视频问答[274]中也被深入研究,但这些都超出了本次调查的范围。
3.2.4 Segment-based methods
Thanks to optical flow, two-stream networks are able to reason about short-term motion information between frames. However, they still cannot capture long-range temporal information. Motivated by this weakness of two-stream networks , Wang et al. [218] proposed a Temporal Segment Network (TSN) to perform video-level action recognition. Though initially proposed to be used with 2D CNNs, it is simple and generic. Thus recent work using either 2D or 3D CNNs, are still built upon this framework.
由于光流,双流网络能够推理帧之间的短期运动信息。然而,他们仍然不能捕获远程时间信息。基于双流网络的这一弱点,Wang等人[218]提出了一种时间段网络(TSN)来执行视频级别的动作识别。虽然最初建议与2D cnn一起使用,但它简单而通用。因此,最近使用2D或3D cnn的工作仍然建立在这个框架上。
To be specific, as shown in Figure 6, TSN first divides a whole video into several segments, where the segments distribute uniformly along the temporal dimension. Then TSN randomly selects a single video frame within each segment and forwards them through the network. Here, the network shares weights for input frames from all the segments. In the end, a segmental consensus is performed to aggregate information from the sampled video frames. The segmental consensus could be operators like average pooling, max pooling, bilinear encoding, etc. In this sense, TSN is capable of modeling long-range temporal structure because the model sees the content from the entire video. In addition, this sparse sampling strategy lowers the training cost over long video sequences but preserves relevant information.
具体来说,如图6所示,TSN首先将整个视频分割成几个片段,这些片段沿时间维度均匀分布。然后TSN在每个视频片段中随机选择一个视频帧,通过网络转发。在这里,网络共享来自所有段的输入帧的权重。最后,对采样的视频帧进行分段一致性聚合。分段共识可以是像平均池、最大池、双线性编码等操作符。在这个意义上,TSN能够建模远程时间结构,因为模型看到的是整个视频的内容。此外,这种稀疏采样策略降低了长视频序列的训练成本,但保留了相关信息。
Given TSN’s good performance and simplicity, most two-stream methods afterwards become segment-based two-stream networks. Since the segmental consensus is simply doing a max or average pooling operation, a feature encoding step might generate a global video feature and lead to improved performance as suggested in traditional approaches [179, 97, 157]. Deep Local Video Feature (DVOF) [114] proposed to treat the deep networks that trained on local inputs as feature extractors and train another encoding function to map the global features into global labels. Temporal Linear Encoding (TLE) network [36] ap- peared concurrently with DVOF, but the encoding layer was embedded in the network so that the whole pipeline could be trained end-to-end. VLAD3 and ActionVLAD [123, 63] also appeared concurrently. They extended the NetVLAD layer [4] to the video domain to perform video-level encoding, instead of using compact bilinear encoding as in [36]. To improve the temporal reasoning ability of TSN, Tempo- ral Relation Network (TRN) [269] was proposed to learn and reason about temporal dependencies between video frames at multiple time scales. The recent state-of-the-art efficient model TSM [128] is also segment-based. We will discuss it in more detail in section 3.4.2.
由于TSN的良好性能和简单性,大多数双流方法后来都变成了基于段的双流网络。由于分段共识只是进行一个最大或平均池操作,因此特征编码步骤可能会生成一个全局视频特征,并像传统方法[179,97,157]中建议的那样,导致性能的提高。深度局部视频特征(Deep Local Video feature, DVOF)[114]提出将对局部输入进行训练的深度网络作为特征提取器,并训练另一个编码函数将全局特征映射到全局标签。时间线性编码(TLE)网络[36]与DVOF并行,但编码层嵌入到网络中,可实现端到端训练。VLAD3和ActionVLAD[123,63]也同时出现。他们将NetVLAD层[4]扩展到视频域以执行视频级的编码,而不是像[36]那样使用紧凑的双线性编码。为了提高TSN的时间推理能力,节拍关系网络(Tempo- ral Relation Network, TRN)[269]被提出来学习和推理视频帧之间在多个时间尺度上的时间依赖性。最近最先进的高效模型TSM[128]也是基于分段的。我们将在3.4.2节中更详细地讨论它。
3.2.5 Multi-stream networks
Two-stream networks are successful because appearance and motion information are two of the most important properties of a video. However, there are other factors that can help video action recognition as well, such as pose, object, audio and depth, etc.
双流网络之所以成功,是因为外观和运动信息是视频最重要的两个属性。然而,还有其他因素可以帮助视频动作识别,如姿势,对象,音频和深度等。
Pose information is closely related to human action. We can recognize most actions by just looking at a pose (skeleton) image without scene context. Although there is previous work on using pose for action recognition [150, 246], P-CNN [23] was one of the first deep learning methods that successfully used pose to improve video action recognition. P-CNN proposed to aggregates motion and appearance information along tracks of human body parts, in a similar spirit to trajectory pooling [214]. [282] extended this pipeline to a chained multi-stream framework, that computed and integrated appearance, motion and pose. They introduced a Markov chain model that added these cues successively and obtained promising results on both action recognition and action localization. PoTion [25] was a follow-up work to P-CNN, but introduced a more powerful feature representation that encoded the movement of human semantic keypoints. They first ran a decent human pose estimator and extracted heatmaps for the human joints in each frame. They then obtained the PoTion representation by temporally aggregating these probability maps. PoTion is lightweight and outperforms previous pose representations [23, 282]. In addition, it was shown to be complementary to standard appearance and motion streams, e.g. combining PoTion with I3D [14] achieved state-of-the-art result on UCF101 (98.2%).
姿态信息与人的行为密切相关。我们可以通过观察没有场景背景的姿势(骨架)图像来识别大多数动作。虽然此前也有使用姿势进行动作识别的研究[150,246],但P-CNN[23]是第一个成功使用姿势改进视频动作识别的深度学习方法之一。P-CNN提出沿着人体部位的轨迹聚合运动和外观信息,其精神类似于轨迹池[214]。[282]将该管道扩展为一个链式多流框架,计算并集成外观、运动和姿势。他们引入了一个马尔可夫链模型,将这些线索依次添加到模型中,在动作识别和动作定位方面都取得了很好的效果。PoTion[25]是P-CNN的后续工作,但是引入了更强大的特征表示,编码了人类语义关键点的移动。他们首先运行了一个像样的人体姿态估计器,提取了每一帧人体关节的热图。然后,他们通过时间聚合这些概率映射获得了PoTion表示。PoTion是轻量级的,并且比之前的姿势表现更好[23,282]。此外,它被证明是标准外观和动作流的补充,例如,将PoTion与I3D[14]结合在UCF101上获得了最先进的结果(98.2%)。
Object information is another important cue because most human actions involve human-object interaction. Wu [232] proposed to leverage both object features and scene features to help video action recognition. The object and scene features were extracted from state-of-the-art pretrained object and scene detectors. Wang et al. [252] took a step further to make the network end-to-end trainable. They introduced a two-stream semantic region based method, by replacing a standard spatial stream with a Faster RCNN network [171], to extract semantic information about the object, person and scene.
物体信息是另一个重要的线索,因为大多数人类行为都涉及人与物体的交互。Wu[232]提出利用物体特征和场景特征来帮助视频动作识别。物体和场景特征提取的最先进的预先训练的物体和场景探测器。Wang等人[252]进一步使网络端到端可训练。他们引入了一种基于两流语义区域的方法,将标准空间流替换为Faster RCNN网络[171],以提取关于对象、人和场景的语义信息。
Audio signals usually come with video, and are complementary to the visual information. Wu et al. [233] introduced a multi-stream framework that integrates spatial, short-term motion, long-term temporal and audio in videos to digest complementary clues. Recently, Xiao et al. [237] introduced AudioSlowFast following [45], by adding another audio pathway to model vision and sound in an unified representation.
音频信号通常伴随着视频,是视觉信息的补充。Wu等人[233]引入了一种多流框架,该框架集成了视频中的空间、短期运动、长期时间和音频,以消化互补的线索。最近,Xiao等人[237]在[45]之后引入了AudioSlowFast,通过添加另一个音频路径以统一表示的方式对视觉和声音进行建模。
In RGB-D video action recognition field, using depth information is standard practice [59]. However, for visionbased video action recognition (e.g., only given monocular videos), we do not have access to ground truth depth information as in the RGB-D domain. An early attempt Depth2Action [280] uses off-the-shelf depth estimators to extract depth information from videos and use it for action recognition.
在RGB-D视频动作识别领域,利用深度信息是标准做法[59]。然而,对于基于视觉的视频动作识别(例如,只给定单目视频),我们不能像在RGB-D领域那样获得地面真相深度信息。早期的尝试Depth2Action[280]使用现成的深度估计器从视频中提取深度信息,并将其用于动作识别。
Essentially, multi-stream networks is a way of multimodality learning, using different cues as input signals to help video action recognition. We will discuss more on multi-modality learning in section 5.12.
从本质上讲,多流网络是一种多模态学习的方式,使用不同的线索作为输入信号来帮助视频动作识别。我们将在第5.12节详细讨论多模态学习。
3.3. The rise of 3D CNNs
Pre-computing optical flow is computationally intensive and storage demanding, which is not friendly for large-scale training or real-time deployment. A conceptually easy way to understand a video is as a 3D tensor with two spatial and one time dimension. Hence, this leads to the usage of 3D CNNs as a processing unit to model the temporal information in a video.
预计算光流计算量大,存储容量大,不利于大规模训练和实时部署。从概念上讲,理解视频的一种简单方法是将其视为具有两个空间维度和一个时间维度的三维张量。因此,这导致使用3D cnn作为处理单元来建模视频中的时间信息。
The seminal work for using 3D CNNs for action recognition is [91]. While inspiring, the network was not deep enough to show its potential. Tran et al. [202] extended [91] to a deeper 3D network, termed C3D. C3D follows the modular design of [188], which could be thought of as a 3D version of VGG16 network. Its performance on standard benchmarks is not satisfactory, but shows strong generalization capability and can be used as a generic feature extractor for various video tasks [250].
使用3D cnn进行动作识别的开创性工作是[91]。虽然令人鼓舞,但这个网络的深度还不足以显示出它的潜力。Tran等人[202]将[91]扩展到更深层次的3D网络,称为C3D。C3D遵循了[188]的模块化设计,可以认为是VGG16网络的3D版本。它在标准基准测试上的性能并不令人满意,但表现出很强的泛化能力,可以用作各种视频任务的通用特征提取器[250]。
However, 3D networks are hard to optimize. In order to train a 3D convolutional filter well, people need a large- scale dataset with diverse video content and action categories. Fortunately, there exists a dataset, Sports1M [99] which is large enough to support the training of a deep 3D network. However, the training of C3D takes weeks to converge. Despite the popularity of C3D, most users just adopt it as a feature extractor for different use cases instead of modifying/fine-tuning the network. This is partially the reason why two-stream networks based on 2D CNNs dominated the video action recognition domain from year 2014 to 2017.
然而,3D网络很难优化。为了很好地训练三维卷积滤波器,人们需要一个具有多种视频内容和动作类别的大规模数据集。幸运的是,有一个数据集Sports1M[99],它足够大,可以支持深度3D网络的训练。然而,C3D的训练需要数周才能完成。尽管C3D很流行,但大多数用户只是将其作为不同用例的特征提取器,而不是修改/微调网络。这也是2014 - 2017年基于二维cnn的双流网络在视频动作识别领域占据主导地位的部分原因。
The situation changed when Carreira et al. [14] proposed I3D in year 2017. As shown in Figure 6, I3D takes a video clip as input, and forwards it through stacked 3D convolutional layers. A video clip is a sequence of video frames, usually 16 or 32 frames are used.
The major contributions of I3D are:
1)it adapts mature image classification architectures to use for 3D CNN;
2)For model weights, it adopts a method developed for initializing optical flow networks in [217] to inflate the ImageNet pre-trained 2D model weights to their counterparts in the 3D model.
Hence, I3D bypasses the dilemma that 3D CNNs have to be trained from scratch. With pre-training on a new large-scale dataset Kinetics400 [100], I3D achieved a 95.6% on UCF101 and 74.8% on HMDB51. I3D ended the era where different methods reported numbers on small-sized datasets such as UCF101 and HMDB512. Publications following I3D needed to report their performance on Kinetics400, or other large-scale benchmark datasets, which pushed video action recognition to the next level. In the next few years, 3D CNNs advanced quickly and became top performers on almost every benchmark dataset. We will review the 3D CNNs based literature in several categories below.当carira等人在2017年提出I3D时,情况发生了变化。如图6所示,I3D将一个视频剪辑作为输入,并将其通过堆叠的3D卷积层转发。一个视频剪辑是一个视频帧序列,通常使用16或32帧。
I3D的主要贡献有:
1)将成熟的图像分类体系结构应用于3D CNN;
2)对于模型权值,采用[217]中为初始化光流网络而开发的方法,将ImageNet预训练的2D模型权值膨胀为3D模型中的对应模型权值。
因此,I3D绕过了3D cnn必须从零开始训练的困境。通过在新的大规模数据集Ki- netics400[100]上进行预训练,I3D在UCF101上取得了95.6%的准确率,在HMDB51上取得了74.8%的准确率。I3D结束了不同方法在小型数据集(如UCF101和HMDB512)上报告数字的时代。I3D之后的出版物需要在Kinetics400或其他大型基准数据集上报告它们的性能,这将视频交流识别推向了下一个水平。在接下来的几年里,3D cnn发展迅速,几乎在所有基准数据集上都是佼佼者。我们将从以下几个类别回顾基于3D cnn的文献。
We want to point out that 3D CNNs are not replacing two-stream networks, and they are not mutually exclusive. They just use different ways to model the temporal relationship in a video. Furthermore, the two-stream approach is a generic framework for video understanding, instead of a specific method. As long as there are two networks, one for spatial appearance modeling using RGB frames, the other for temporal motion modeling using optical flow, the method may be categorized into the family of two-stream networks. In [14], they also build a temporal stream with I3D architecture and achieved even higher performance, 98.0% on UCF101 and 80.9% on HMDB51. Hence, the final I3D model is a combination of 3D CNNs and two- stream networks. However, the contribution of I3D does not lie in the usage of optical flow.
我们想指出的是,3D cnn并没有取代双流网络,它们也不是相互排斥的。他们只是用不同的方法来模拟视频中的时间关系。此外,双流方法是视频理解的通用框架,而不是一种特定的方法。只要有两个网络,一个是使用RGB帧进行空间外观建模,另一个是使用光流进行时间运动建模,这种方法就可以归为双流网络。在[14]中,他们还构建了一个具有I3D架构的时间流,并实现了更高的性能,在UCF101上达到98.0%,在HMDB51上达到80.9%。因此,最终的I3D模型是三维cnn和双流网络的组合。然而,I3D的贡献并不在于光流的使用。
3.3.1 Mapping from 2D to 3D CNNs
2D CNNs enjoy the benefit of pre-training brought by the large-scale of image datasets such as ImageNet [30] and Places205 [270], which cannot be matched even with the largest video datasets available today. On these datasets numerous efforts have been devoted to the search for 2D CNN architectures that are more accurate and generalize better. Below we describe the efforts to capitalize on these advances for 3D CNNs.
2D cnn享受着ImageNet[30]和Places205[270]等大规模图像数据集带来的预训练的好处,即使是当今最大的视频数据集也无法与之匹敌。在这些数据集上,许多人致力于寻找更准确、更一般化的2D CNN架构。下面我们将介绍如何利用3D cnn的这些进展。
ResNet3D [74] directly took 2D ResNet [76] and replaced all the 2D convolutional filters with 3D kernels. They believed that by using deep 3D CNNs together with large-scale datasets one can exploit the success of 2D CNNs on ImageNet. Motivated by ResNeXt [238], Chen et al. [20] presented a multi-fiber architecture that slices a complex neural network into an ensemble of lightweight networks (fibers) that facilitate information flow between fibers, reduces the computational cost at the same time. In- spired by SENet [81], STCNet [33] propose to integrate channel-wise information inside a 3D block to capture both spatial-channels and temporal-channels correlation information throughout the network.
ResNet3D[74]直接采用2D ResNet[76],将所有的2D卷积滤波器替换为3D内核。他们相信,通过将深度3D cnn与大规模数据集结合使用,可以利用ImageNet上2D cnn的成功。受ResNeXt[238]的激励,Chen等人[20]提出了一种多光纤架构,该架构将复杂的神经网络切割成轻量级网络(光纤)的集成,促进了光纤之间的信息流动,同时降低了计算成本。受SENet[81]启发,STCNet[33]提出在3D块中集成通道信息,以捕获整个网络中的空间通道和时间通道相关信息。
3.3.2 Unifying 2D and 3D CNNs
To reduce the complexity of 3D network training, P3D [169] and R2+1D [204] explore the idea of 3D factorization. To be specific, a 3D kernel (e.g., 3×3×3) can be factorized to two separate operations, a 2D spatial convolution (e.g., 1 × 3 × 3) and a 1D temporal convolution (e.g., 3 × 1 × 1). The differences between P3D and R2+1D are how they arrange the two factorized operations and how they formulate each residual block. Trajectory convolution [268] follows this idea but uses deformable convolution for the temporal component to better cope with motion.
为了降低三维网络训练的复杂性,P3D[169]和R2+1D[204]探索了三维因子分解的思想。具体来说,一个三维核(例如,3×3×3)可以分解为两个独立的运算,一个二维空间卷积(例如,1 ×3×3)和一个一维时间卷积(例如,3× 1 × 1)。P3D和R2+1D之间的区别在于它们如何分配这两个分解运算的范围,以及它们如何表述每个残差块。轨迹卷积[268]遵循这一思想,但为更好地处理运动,时间分量使用了可变形卷积。
Another way of simplifying 3D CNNs is to mix 2D and 3D convolutions in a single network. MiCTNet [271] integrates 2D and 3D CNNs to generate deeper and more informative feature maps, while reducing training complexity in each round of spatio-temporal fusion. ARTNet [213] introduces an appearance-and-relation network by using a new building block. The building block consists of a spa- tial branch using 2D CNNs and a relation branch using 3D CNNs. S3D [239] combines the merits from approaches mentioned above. It first replaces the 3D convolutions at the bottom of the network with 2D kernels, and find that this kind of top-heavy network has higher recognition accuracy. Then S3D factorizes the remaining 3D kernels as P3D and R2+1D do, to further reduce the model size and train- ing complexity. A concurrent work named ECO [283] also adopts such a top-heavy network to achieve online video understanding.
另一种简化3D cnn的方法是在单个网络中混合2D和3D卷积。MiCTNet[271]集成了2D和3D cnn,生成更深入、更有形态的特征图,同时降低了每一轮时空融合的训练复杂度。ARTNet[213]通过使用一种新的构建块引入了一种外观-关系网络。该构建模块由一个使用2D cnn的spa分支和一个使用3D cnn的关系分支组成。S3D[239]结合了上述方法的优点。该方法首先用二维核替换网络底部的三维卷积,发现这种头重脚轻的网络具有较高的识别精度。然后S3D像P3D和R2+1D那样对剩余的3D核进行因式分解,进一步减小模型的大小和训练的复杂度。一个名为ECO[283]的并发工作也采用了这种头重头轻的网络来实现在线视频理解。
3.3.3 Long-range temporal modeling
In 3D CNNs, long-range temporal connection may be achieved by stacking multiple short temporal convolutions, e.g., 3 × 3 × 3 filters. However, useful temporal information may be lost in the later stages of a deep network, especially for frames far apart.
在3D cnn中,远程时间连接可以通过堆叠多个短时间卷积来实现,例如3 × 3 × 3滤波器。然而,在深度网络的后期阶段,有用的时间信息可能会丢失,特别是对于距离很远的帧。
In order to perform long-range temporal modeling, LTC [206] introduces and evaluates long-term temporal convolutions over a large number of video frames. However, limited by GPU memory, they have to sacrifice input resolution to use more frames. After that, T3D [32] adopted a densely connected structure [83] to keep the original temporal information as complete as possible to make the final prediction. Later, Wang et al. [219] introduced a new building block, termed non-local. Non-local is a generic operation similar to self-attention [207], which can be used for many computer vision tasks in a plug-and-play manner. As shown in Figure 6, they used a spacetime non-local module after later residual blocks to capture the long-range dependence in both space and temporal domain, and achieved improved performance over baselines without bells and whistles. Wu et al. [229] proposed a feature bank representation, which embeds information of the entire video into a memory cell, to make contextaware prediction. Recently, V4D [264] proposed video-level 4D CNNs, to model the evolution of long-range spatio-temporal representation with 4D convolutions.
为了进行长期时间建模,LTC[206]引入并计算大量视频帧上的长期时间卷积。然而,受到GPU内存的限制,它们不得不牺牲输入分辨率来使用更多的帧。之后,T3D[32]采用密连结构[83],尽可能保持原始的时间信息完整,从而进行最终预测。后来,Wang等人[219]引入了一种新的构建块,称为非局部构建块。非局部操作是一种类似于自我注意的通用操作[207],可以以即插即用的方式用于许多计算机视觉任务。如图6所示,他们在后期残留块之后使用一个时空非局部模块来捕获空间和时间域的长期依赖,并在没有铃声和口哨的基线上取得了改进的性能。Wu等人[229]提出了一种特征库表示,该表示将整个视频的信息嵌入到一个记忆单元中,以进行上下文感知预测。最近,V4D[264]提出了视频级4D cnn,用4D卷积来模拟远程时空表示的演化。
3.3.4 Enhancing 3D efficiency
In order to further improve the efficiency of 3D CNNs (i.e., in terms of GFLOPs, model parameters and latency), many variants of 3D CNNs begin to emerge.
为了进一步提高3D cnn的效率(即在gflop、模型参数和延迟方面),许多3D cnn的变体开始出现。
Motivated by the development in efficient 2D networks, researchers started to adopt channel-wise separable convolution and extend it for video classification [111, 203]. CSN [203] reveals that it is a good practice to factorize 3D convolutions by separating channel interactions and spatiotemporal interactions, and is able to obtain state-of-the-art performance while being 2 to 3 times faster than the previous best approaches. These methods are also related to multi-fiber networks [20] as they are all inspired by group convolution.
受高效2D网络发展的激励,研究人员开始采用信道可分卷积,并将其扩展到视频分类中[111,203]。CSN[203]揭示了通过分离信道相互作用和时空相互作用来分解三维卷积是一种很好的实践,并且能够获得最先进的性能,同时比之前的最佳方法快2到3倍。这些方法也与多光纤网络[20]有关,因为它们都是受到群卷积的启发。
Recently, Feichtenhofer et al. [45] proposed SlowFast, an efficient network with a slow pathway and a fast pathway. The network design is partially inspired by the biological Parvo- and Magnocellular cells in the primate visual systems. As shown in Figure 6, the slow pathway operates at low frame rates to capture detailed semantic information, while the fast pathway operates at high temporal resolution to capture rapidly changing motion. In order to incorporate motion information such as in two-stream networks, SlowFast adopts a lateral connection to fuse the representation learned by each pathway. Since the fast pathway can be made very lightweight by reducing its channel capacity, the overall efficiency of SlowFast is largely improved. Although SlowFast has two pathways, it is different from the two-stream networks [187], because the two pathways are designed to model different temporal speeds, not spatial and temporal modeling. There are several concurrent papers using multiple pathways to balance the accuracy and efficiency [43].
最近,Feichtenhofer等人[45]提出了一种具有慢通道和快通道的高效网络SlowFast。这种网络设计的部分灵感来自于灵长类视觉系统中的生物小细胞和巨细胞。如图6所示,慢路径以低帧率运行以捕获详细的语义信息,而快路径以高时间分辨率运行以捕获快速变化的运动。为了合并运动信息,如在两流网络,SlowFast采用横向连接融合的表示学习的每个途径。由于快速通道可以通过减少其通道容量而变得非常轻量级,因此SlowFast的总体效率得到了很大的提高。尽管SlowFast有两条路径,但它与双流网络不同[187],因为两条路径设计用于建模不同的时间速度,而不是空间和时间建模。有多个并行人员使用多个路径来平衡准确性和效率。
Following this line, Feichtenhofer [44] introduced X3D that progressively expand a 2D image classification architecture along multiple network axes, such as temporal duration, frame rate, spatial resolution, width, bottleneck width, and depth. X3D pushes the 3D model modification/factorization to an extreme, and is a family of efficient video networks to meet different requirements of target complexity. With similar spirit, A3D [276] also leverages multiple network configurations. However, A3D trains these configurations jointly and during inference deploys only one model. This makes the model at the end more efficient. In the next section, we will continue to talk about efficient video modeling, but not based on 3D convolutions.
按照这一思路,Feichtenhofer[44]引入了X3D,它沿着多个网络轴(如时间持续时间、帧速率、空间分辨率、宽度、瓶颈宽度和深度)逐步扩展二维图像分类架构。X3D将三维模型修改/因子分解发挥到了极致,是一组高效的视频网络,能够满足不同的获取复杂度要求。基于类似的精神,A3D[276]也控制了多种网络配置。然而,A3D联合训练这些配置,在推理过程中只部署一个模型。这使得最终的模型更加高效。在下一节中,我们将继续讨论有效的视频建模,但不是基于3D卷积。
3.4. Efficient Video Modeling
With the increase of dataset size and the need for deployment, efficiency becomes an important concern.
随着数据集规模的增加和部署需求的增加,效率成为一个重要的问题。
If we use methods based on two-stream networks, we need to pre-compute optical flow and store them on local disk. Taking Kinetics400 dataset as an illustrative exam- ple, storing all the optical flow images requires 4.5TB disk space. Such a huge amount of data would make I/O become the tightest bottleneck during training, leading to a waste of GPU resources and longer experiment cycle. In addition, pre-computing optical flow is not cheap, which means all the two-stream networks methods are not real-time.
如果采用基于双流网络的方法,则需要预先计算光流并将其存储在本地磁盘上。以Kinetics400数据集为例,存储所有光流图像需要4.5TB的磁盘空间。如此庞大的数据量会使I/O成为训练中最紧的瓶颈,导致GPU资源的浪费和实验周期的延长。此外,预计算光流的成本并不低,这意味着所有的双流网络方法都不是实时的。
If we use methods based on 3D CNNs, people still find that 3D CNNs are hard to train and challenging to deploy. In terms of training, a standard SlowFast network trained on Kinetics400 dataset using a high-end 8-GPU machine takes 10 days to complete. Such a long experimental cycle and huge computing cost makes video understanding research only accessible to big companies/labs with abundant computing resources. There are several recent attempts to speed up the training of deep video models [230], but these are still expensive compared to most image-based computer vision tasks. In terms of deployment, 3D convolution is not as well supported as 2D convolution for different platforms. Furthermore, 3D CNNs require more video frames as input which adds additional IO cost.
如果我们使用基于3D cnn的方法,人们仍然发现3D cnn训练困难,部署具有挑战性。在训练方面,使用高端8-GPU机器在Kinetics400数据集上训练一个标准的SlowFast网络需要10天才能完成。如此漫长的实验周期和巨大的计算成本,使得视频理解研究只能在拥有丰富计算资源的大公司/实验室进行。最近有一些加速深度视频模型训练的尝试[230],但与大多数基于图像的计算机视觉任务相比,这些仍是昂贵的。在部署方面,不同平台对3D卷积的支持不如2D卷积。此外,3D cnn需要更多的视频帧作为输入,这增加了额外的IO成本。
Hence, starting from year 2018, researchers started to investigate other alternatives to see how they could improve accuracy and efficiency at the same time for video action recognition. We will review recent efficient video modeling methods in several categories below.
因此,从2018年开始,研究人员开始研究其他替代方案,看看如何在提高视频动作识别的准确性和效率的同时。我们将在下面的几个类别中回顾最近的高效视频建模方法。
3.4.1 Flow-mimic approaches
One of the major drawback of two-stream networks is its need for optical flow. Pre-computing optical flow is computationally expensive, storage demanding, and not end-to- end trainable for video action recognition. It is appealing if we can find a way to encode motion information without using optical flow, at least during inference time.
双流网络的主要缺点之一是它需要光流。预计算光流的计算成本高,存储需求大,而且不能端到端训练视频动作识别。如果我们能找到一种不使用光流的方法来编码运动信息,至少在推理期间是很有吸引力的。
[146] and [35] are early attempts for learning to estimate optical flow inside a network for video action recognition. Although these two approaches do not need optical flow during inference, they require optical flow during training in order to train the flow estimation network. Hidden two-stream networks [278] proposed MotionNet to replace the traditional optical flow computation. MotionNet is a lightweight network to learn motion information in an unsupervised manner, and when concatenated with the temporal stream, is end-to-end trainable. Thus, hidden two- stream CNNs [278] only take raw video frames as input and directly predict action classes without explicitly computing optical flow, regardless of whether its the training or inference stage. PAN [257] mimics the optical flow features by computing the difference between consecutive feature maps. Following this direction, [197, 42, 116, 164] continue to investigate end-to-end trainable CNNs to learn optical- flow-like features from data. They derive such features directly from the definition of optical flow [255]. MARS [26] and D3D [191] used knowledge distillation to combine two-stream networks into a single stream, e.g., by tuning the spatial stream to predict the outputs of the temporal stream. Recently, Kwon et al. [110] introduced MotionSqueeze module to estimate the motion features. The proposed module is end-to-end trainable and can be plugged into any network, similar to [278].
[146]和[35]是学习估计网络中用于视频动作识别的光流的早期尝试。虽然这两种方法在推理过程中不需要光流,但在训练过程中需要光流来训练流量估计网络。隐式双流网络[278]提出了MotionNet来取代传统的光流计算。MotionNet是一个轻量级的网络,以无监督的方式学习运动信息,当与时间流连接时,是端到端可训练的。因此,隐式双流cnn[278]只将原始视频帧作为输入,直接预测动作类,而不显式计算光流,无论在训练阶段还是推理阶段。PAN[257]通过计算连续特征映射之间的差异来模拟光流特征。按照这个方向,[197,42,116,164]继续研究端到端可训练的cnn从数据中学习类似光流的特征。他们直接从光流的定义中推导出这些特征[255]。MARS[26]和D3D[191]使用知识蒸馏将两个流网络组合为单个流,例如,通过调整spa流来预测时间流的输出。最近,Kwon等人[110]引入了MotionSqueeze模组来估计运动特征。所提出的模块是端到端可训练的,可以插入任何网络,类似于[278]。
3.4.2 Temporal modeling without 3D convolution
A simple and natural choice to model temporal relationship between frames is using 3D convolution. However, there are many alternatives to achieve this goal. Here, we will review some recent work that performs temporal modeling without 3D convolution.
建模帧间时间关系的一个简单而自然的选择是使用3D卷积。然而,有许多替代方案可以实现这一目标。在这里,我们将回顾一些最近的工作,执行时间建模没有三维卷积。
Lin et al. [128] introduce a new method, termed temporal shift module (TSM). TSM extends the shift operation [228] to video understanding. It shifts part of the channels along the temporal dimension, thus facilitating information exchanged among neighboring frames. In order to keep spatial feature learning capacity, they put temporal shift module inside the residual branch in a residual block. Thus all the information in the original activation is still accessible after temporal shift through identity mapping. The biggest advantage of TSM is that it can be inserted into a 2D CNN to achieve temporal modeling at zero computation and zero parameters. Similar to TSM, TIN [182] introduces a temporal interlacing module to model the temporal convolution.
Lin等人[128]介绍了一种新的方法,称为时间移位模块(TSM)。TSM将移位操作[228]扩展到视频理解。它沿着时间维度移动部分通道,从而促进相邻帧之间的信息交换。为了保持空间特征的学习能力,他们在残差块的残差分支中加入了时间位移模块。因此,在时间移位后,通过身份映射,原始激活中的所有信息仍然可以被访问。TSM的最大优点是可以插入到2D CNN中,实现零计算和零参数的时间建模。与TSM类似,TIN[182]引入了一个时间交错模块来建模时间卷积。
There are several recent 2D CNNs approaches using at- tention to perform long-term temporal modeling [92, 122, 132, 133]. STM [92] proposes a channel-wise spatio- temporal module to present the spatio-temporal features and a channel-wise motion module to efficiently encode mo- tion features. TEA [122] is similar to STM, but inspired by SENet [81], TEA uses motion features to recalibrate the spatio-temporal features to enhance the motion pattern. Specifically, TEA has two components: motion excitation and multiple temporal aggregation, while the first one han- dles short-range motion modeling and the second one effi- ciently enlarge the temporal receptive field for long-range temporal modeling. They are complementary and both light-weight, thus TEA is able to achieve competitive re- sults with previous best approaches while keeping FLOPs as low as many 2D CNNs. Recently, TEINet [132] also adopts attention to enhance temporal modeling. Note that, the above attention-based methods are different from non- local [219], because they use channel attention while non- local uses spatial attention.
There are several recent 2D CNNs approaches using attention to perform long-term temporal modeling [92, 122, 132, 133]. STM [92] proposes a channel-wise spatio- temporal module to present the spatio-temporal features and a channel-wise motion module to efficiently encode mo- tion features. TEA [122] is similar to STM, but inspired by SENet [81], TEA uses motion features to recalibrate the spatio-temporal features to enhance the motion pattern. Specifically, TEA has two components: motion excitation and multiple temporal aggregation, while the first one han- dles short-range motion modeling and the second one effi- ciently enlarge the temporal receptive field for long-range temporal modeling. They are complementary and both light-weight, thus TEA is able to achieve competitive re- sults with previous best approaches while keeping FLOPs as low as many 2D CNNs. Recently, TEINet [132] also adopts attention to enhance temporal modeling. Note that, the above attention-based methods are different from non- local [219], because they use channel attention while non- local uses spatial attention.
最近有几种二维cnn方法利用注意力进行长期时间建模[92,122,132,133]。STM[92]提出了基于信道的时空模块来表示时空特征,基于信道的运动模块来有效地编码运动特征。TEA[122]类似于STM,但受到SENet[81]的启发,TEA使用运动特征来重新校准时空特征,以增强运动模式。具体而言,TEA包含两个部分:运动激励和多个时间聚合,其中第一个部分负责近距离运动建模,第二个部分有效地扩大了时间接受域,用于远程时间建模。它们是互补的,而且都很轻,因此TEA能够取得与以前最好的方法相比具有竞争力的结果,同时将flop保持在低到2D cnn的数量。最近,TEINet[132]也采用了注意增强时间建模。注意,上述基于注意的方法与非局部方法不同[219],因为它们使用通道注意,而非局部方法使用空间注意。
3.5. Miscellaneous
In this section, we are going to show several other directions that are popular for video action recognition in the last decade.
在本节中,我们将展示在过去十年中流行的视频动作识别的其他几个方向。
3.5.1 Trajectory-based methods
While CNN-based approaches have demonstrated their superiority and gradually replaced the traditional hand-crafted methods, the traditional local feature pipeline still has its merits which should not be ignored, such as the usage of trajectory.
虽然基于cnn的方法已经证明了其优越性,并逐渐取代了传统的手工方法,但传统的局部特征管道仍有不可忽视的优点,如轨迹的使用。
Inspired by the good performance of trajectory-based methods [210], Wang et al. [214] proposed to conduct trajectory-constrained pooling to aggregate deep convolutional features into effective descriptors, which they term as TDD. Here, a trajectory is defined as a path tracking down pixels in the temporal dimension. This new video representation shares the merits of both hand-crafted features and deep-learned features, and became one of the top performers on both UCF101 and HMDB51 datasets in the year 2015. Concurrently, Lan et al. [113] incorporated both Independent Subspace Analysis (ISA) and dense trajectories into the standard two-stream networks, and show the complementarity between data-independent and data-driven approaches. Instead of treating CNNs as a fixed feature extractor, Zhao et al. [268] proposed trajectory convolution to learn features along the temporal dimension with the help of trajectories.
受基于轨迹的方法的良好性能[210]的启发,Wang等人[214]提出进行轨迹约束池化,将深度卷积特征聚合为有效的描述符,他们将其称为TDD。在这里,轨迹被定义为在时间维度中跟踪像素的路径。这种新的视频表示形式兼有手工制作功能和深度学习功能的优点,并在2015年成为UCF101和HMDB51数据集上的最佳表现之一。同时,Lan等人[113]将独立子空间分析(ISA)和密集轨迹纳入标准的双流网络,并展示了数据独立方法和数据驱动方法之间的互补性。赵等人[268]没有将cnn作为固定的特征提取器,而是提出了轨迹卷积,在轨迹的帮助下沿着时间维度学习特征。
3.5.2 Rank pooling
There is another way to model temporal information inside a video, termed rank pooling (a.k.a learning-to-rank). The seminal work in this line starts from VideoDarwin [53], that uses a ranking machine to learn the evolution of the appearance over time and returns a ranking function. The ranking function should be able to order the frames of a video temporally, thus they use the parameters of this ranking function as a new video representation. VideoDarwin [53] is not a deep learning based method, but achieves comparable performance and efficiency.
还有另一种方法可以对视频中的时间信息建模,称为排名池(也称为学习排名)。这方面的开创性工作始于VideoDarwin[53],它使用一个排名机器来了解外观随时间的演变,并返回一个排名函数。该排序函数应该能够对视频的帧进行时间排序,因此他们使用该排序函数的参数作为一种新的视频表示。VideoDarwin[53]不是一种基于深度学习的方法,但达到了相当的性能和效率。
To adapt rank pooling to deep learning, Fernando [54] introduces a differentiable rank pooling layer to achieve end-to-end feature learning. Following this direction, Bilen et al. [9] apply rank pooling on the raw image pixels of a video producing a single RGB image per video, termed dynamic images. Another concurrent work by Fernando [51] extends rank pooling to hierarchical rank pooling by stacking multiple levels of temporal encoding. Finally, [22] propose a generalization of the original ranking formulation [53] using subspace representations and show that it leads to significantly better representation of the dynamic evolution of actions, while being computationally cheap.
为了使秩池适应深度学习,Fernando[54]引入了可区分的秩池层来实现端到端特征学习。按照这个方向,Bilen等人[9]对视频的原始图像像素应用秩池,每个视频产生一个RGB图像,称为动态图像。Fernando[51]同时进行的另一项工作是通过堆叠多层时间编码将秩池扩展为分层秩池。最后,[22]提出了使用子空间表示的原始排序公式[53]的一般化,并表明它可以显著更好地表示动作的动态演化,同时计算成本低。
3.5.3 Compressed video action recognition
Most video action recognition approaches use raw videos (or decoded video frames) as input. However, there are several drawbacks of using raw videos, such as the huge amount of data and high temporal redundancy. Video compression methods usually store one frame by reusing contents from another frame (i.e., I-frame) and only store the difference (i.e., P-frames and B-frames) due to the fact that adjacent frames are similar. Here, the I-frame is the original RGB video frame, and P-frames and B-frames include the motion vector and residual, which are used to store the difference. Motivated by the developments in the video compression domain, researchers started to adopt compressed video representations as input to train effective video models.
大多数视频动作识别方法使用原始视频(或解码视频帧)作为输入。然而,使用原始视频有一些缺点,如数据量大,时间冗余高。视频压缩方法通常通过重用来自另一帧(即i帧)的内容来存储一帧,并且只存储由于相邻帧相似而产生的差异(即p帧和b帧)。其中i帧为原始RGB视频帧,p帧和b帧包括运动矢量和残差,用于存储差值。受视频压缩领域发展的激励,研究人员开始采用压缩视频表示作为输入来训练有效的视频模型。
Since the motion vector has coarse structure and may contain inaccurate movements, Zhang et al. [256] adopted knowledge distillation to help the motion-vector-based temporal stream mimic the optical-flow-based temporal stream.
由于运动矢量结构粗糙,可能包含不准确的运动,Zhang等[256]采用知识蒸馏的方法帮助基于运动矢量的时间流模拟基于光流的时间流。
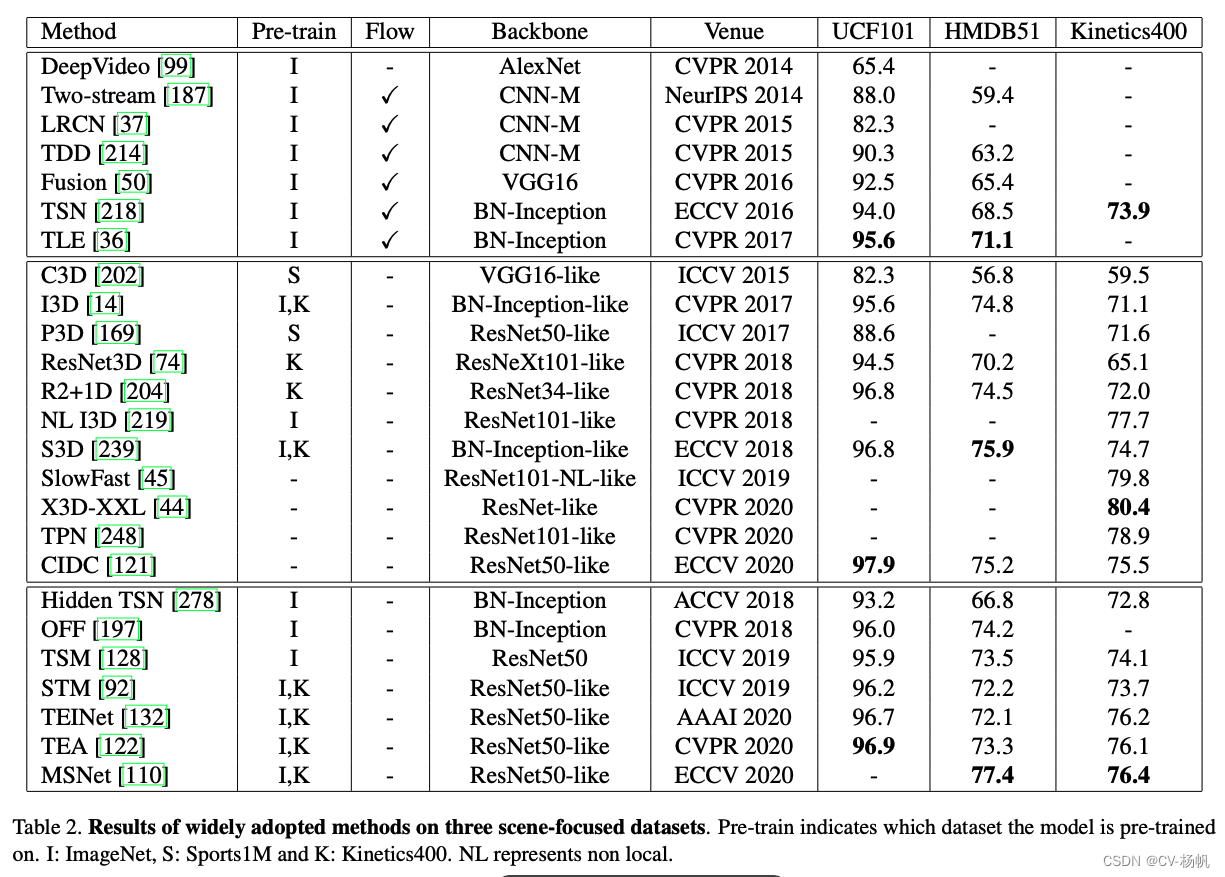
Table 2. Results of widely adopted methods on three scene-focused datasets. Pre-train indicates which dataset the model is pre-trained on. I: ImageNet, S: Sports1M and K: Kinetics400. NL represents non local.
表2。广泛采用的方法在三个场景聚焦数据集上的结果。预训练指示模型在哪个数据集上进行预训练。I: ImageNet, S: Sports1M和K: Kinetics400。NL表示非本地的。
However, their approach required extracting and processing each frame. They obtained comparable recognition accuracy with standard two-stream networks, but were 27 times faster. Wu et al. [231] used a heavyweight CNN for the I frame and lightweight CNN’s for the P frames. This required that the motion vectors and residuals for each P frame be referred back to the I frame by accumulation. DMC-Net [185] is a follow-up work to [231] using adversarial loss. It adopts a lightweight generator network to help the motion vector capturing fine motion details, instead of knowledge distillation as in [256]. A recent paper SCSampler [106], also adopts compressed video representation for sampling salient clips and we will discuss it in the next section 3.5.4. As yet none of the compressed approaches can deal with B-frames due to the added complexity.
然而,他们的方法需要提取和处理每一帧。它们获得了与标准双流网络相当的识别精度,但速度快了27倍。Wu等人[231]对I帧使用重量级CNN,对P帧使用轻量级CNN。这要求每个P帧的运动向量和残差通过累加返回到I帧。DMC-Net[185]是[231]使用对抗损失的后续工作。它采用了一个轻量级的生成器网络来帮助运动向量捕捉精细的运动细节,而不是像[256]那样进行知识蒸馏。最近的一篇论文SCSampler[106]也采用了压缩视频表示来采样显著片段,我们将在下一节3.5.4中讨论它。由于b帧的复杂性,目前还没有一种压缩方法能够处理b帧。
3.5.4 Frame/Clip sampling
Most of the aforementioned deep learning methods treat every video frame/clip equally for the final prediction. However, discriminative actions only happen in a few moments, and most of the other video content is irrelevant or weakly related to the labeled action category. There are several drawbacks of this paradigm. First, training with a large proportion of irrelevant video frames may hurt performance. Second, such uniform sampling is not efficient during inference.
前面提到的大多数深度学习方法对每个视频帧/剪辑的最终预测都是平等的。然而,歧视行为只发生在几分钟内,其他视频内容大多与所标记的行为类别无关或关系不大。这种范式有几个缺点。首先,使用大量无关视频帧进行训练可能会损害成绩。其次,这种均匀抽样在推理过程中效率不高。
Partially inspired by how human understand a video using just a few glimpses over the entire video [251], many methods were proposed to sample the most informative video frames/clips for both improving the performance and making the model more efficient during inference.
在一定程度上,受人类如何仅使用整个视频中的一小部分来理解视频[251]的启发,提出了许多方法来抽样信息最丰富的视频帧/剪辑,以提高性能并使模型在推理过程中更有效。
KVM [277] is one of the first attempts to propose an end-to-end framework to simultaneously identify key volumes and do action classification. Later, [98] introduce AdaScan that predicts the importance score of each video frame in an online fashion, which they term as adaptive temporal pooling. Both of these methods achieve improved performance, but they still adopt the standard evaluation scheme which does not show efficiency during inference. Recent approaches focus more on the efficiency [41, 234, 8, 106]. AdaFrame [234] follows [251, 98] but uses a reinforcement learning based approach to search more informative video clips. Concurrently, [8] uses a teacher-student framework, i.e., a see-it-all teacher can be used to train a compute ef-ficient see-very-little student. They demonstrate that the efficient student network can reduce the inference time by 30% and the number of FLOPs by approximately 90% with negligible performance drop. Recently, SCSampler [106] trains a lightweight network to sample the most salient video clips based on compressed video representations, and achieve state-of-the-art performance on both Kinetics400 and Sports1M dataset. They also empirically show that such saliency-based sampling is not only efficient, but also enjoys higher accuracy than using all the video frames.
KVM[277]是首次提出端到端框架的尝试之一,该框架可以同时识别密钥卷并进行动作分类。后来,[98]引入了AdaScan,以在线方式预测每个视频帧的重要性得分,他们称之为自适应时间池。这两种方法都提高了性能,但仍然采用标准的评价方案,在推理过程中没有表现出效率。最近的方法更多地关注效率[41,234,8,106]。AdaFrame[234]遵循了[251,98],但使用基于强化学习的方法来搜索更有信息的视频剪辑。同时,[8]使用了一个师生框架,即,一个无所不知的老师可以用来训练一个计算效率高、只知甚少的学生。他们证明,高效的学生网络可以减少30%的推理时间和大约90%的flop数量,而性能下降可以忽略不计。最近,SCSampler[106]训练一个轻量级网络,基于压缩视频表示对最显著的视频剪辑进行采样,并在Kinetics400和Sports1M数据集上实现了最先进的性能。他们还从经验上表明,这种基于显著性的采样不仅有效,而且比使用所有视频帧具有更高的准确性。
3.5.5 Visual tempo
Visual tempo is a concept to describe how fast an action goes. Many action classes have different visual tempos. There are several papers exploring different temporal rates (tempos) for improved temporal modeling [273, 147, 82, 281, 45, 248]. Initial attempts usually capture the video tempo through sampling raw videos at multiple rates and constructing an input-level frame pyramid [273, 147, 281]. Recently, SlowFast [45], as we discussed in section 3.3.4, utilizes the characteristics of visual tempo to design a two-pathway network for better accuracy and efficiency tradeoff. CIDC [121] proposed directional temporal modeling along with a local backbone for video temporal modeling. TPN [248] extends the tempo modeling to the feature-level and shows consistent improvement over previous approaches.
视觉节奏是一个描述动作进行速度的概念。许多动作类都有不同的视觉节奏。有几篇论文探讨了改进时态建模的不同时间速率(速度)[273,147,82,281,45,248]。最初的尝试通常是通过以多个速率采样原始视频并构建输入级帧金字塔来捕获视频节奏[273,147,281]。最近,SlowFast[45],正如我们在3.3.4节中讨论的,利用视觉节奏的特性设计了一个双路径网络,以获得更好的准确性和效率权衡。CIDC[121]提出了定向时间建模以及视频时间建模的局部主干。TPN[248]将节奏建模扩展到特征级,并显示出与之前方法的一致改进。
We would like to point out that visual tempo is also widely used in self-supervised video representation learning [6, 247, 16] since it can naturally provide supervision signals to train a deep network. We will discuss more details on self-supervised video representation learning in section 5.13.
我们想指出的是,视觉节奏也被广泛应用于自监督视频表示学习[6,247,16],因为它可以自然地提供监督信号来训练深度网络。我们将在第5.13节讨论关于自监督视频表示学习的更多细节。
4. Evaluation and Benchmarking
In this section, we compare popular approaches on benchmark datasets. To be specific, we first introduce standard evaluation schemes in section 4.1. Then we divide common benchmarks into three categories, scene-focused (UCF101, HMDB51 and Kinetics400 in section 4.2), motion-focused (Sth-Sth V1 and V2 in section 4.3) and multi-label (Charades in section 4.4). In the end, we present a fair comparison among popular methods in terms of both recognition accuracy and efficiency in section 4.5.We would like to point out that visual tempo is also widely used in self-supervised video representation learning [6, 247, 16] since it can naturally provide supervision signals to train a deep network. We will discuss more details on self-supervised video representation learning in section 5.13.
在本节中,我们将比较基准数据集上的流行方法。具体而言,我们首先在4.1节介绍了标准评价方案。然后我们将通用基准分为三类,以场景为中心(第4.2节中的UCF101, HMDB51和Kinetics400),以动作为中心(第4.3节中的Sth-Sth V1和V2)和多标签(第4.4节中的Charades)。最后,我们在4.5节中对常用方法在识别精度和效率方面进行了比较。我们想指出的是,视觉节奏也被广泛应用于自监督视频表示学习[6,247,16],因为它可以自然地提供监督信号来训练深度网络。我们将在第5.13节讨论关于自监督视频表示学习的更多细节。
4.1. Evaluation scheme
During model training, we usually randomly pick a video frame/clip to form mini-batch samples. However, for evaluation, we need a standardized pipeline in order to perform fair comparisons.
在模型训练过程中,我们通常随机选取一个视频帧/剪辑,形成小批量样本。然而,对于评估,我们需要一个标准化的管道来执行公平的比较。
For 2D CNNs, a widely adopted evaluation scheme is to evenly sample 25 frames from each video following [187, 217]. For each frame, we perform ten-crop data augmentation by cropping the 4 corners and 1 center, flipping them horizontally and averaging the prediction scores (before softmax operation) over all crops of the samples, i.e., this means we use 250 frames per video for inference.
对于2D cnn,广泛采用的评估方案是从每个视频中均匀采样25帧[187,217]。对于每一帧,我们通过裁剪4个角和1个中心,水平翻转它们,并在样本的所有作物上平均预测得分(在softmax操作之前)来执行10作物数据增强,也就是说,这意味着我们使用每个视频250帧进行推断。
For 3D CNNs, a widely adopted evaluation scheme termed 30-view strategy is to evenly sample 10 clips from each video following [219]. For each video clip, we perform three-crop data augmentation. To be specific, we scale the shorter spatial side to 256 pixels and take three crops of 256 × 256 to cover the spatial dimensions and average the prediction scores.
对于3D cnn,一种被广泛采用的评估方案称为30-view策略,即从以下每个视频中平均采样10个片段[219]。对于每个视频剪辑,我们执行三次裁剪数据增强。具体来说,我们将较短的空间边缩放到256像素,取三种256 × 256的作物覆盖空间维度,并对预测得分进行平均。
However, the evaluation schemes are not fixed. They are evolving and adapting to new network architectures and different datasets. For example, TSM [128] only uses two clips per video for small-sized datasets [190, 109], and perform three-crop data augmentation for each clip despite its being a 2D CNN. We will mention any deviations from the standard evaluation pipeline.
然而,评价方案并不是固定的。它们正在进化并适应新的网络架构和不同的数据集。例如,TSM[128]对于小型数据集[190,109],每个视频只使用两个剪辑,并对每个剪辑执行三次裁剪数据增强,尽管它是一个2D CNN。我们将提到与标准评估管道的任何偏差。
In terms of evaluation metric, we report accuracy for single-label action recognition, and mAP (mean average precision) for multi-label action recognition.
在评价指标方面,我们报告了单标签动作识别的准确性和多标签动作识别的平均平均精度(mAP)。
4.2. Scene-focused datasets
Here, we compare recent state-of-the-art approaches on scene-focused datasets: UCF101, HMDB51 and Kinet- ics400. The reason we call them scene-focused is because most action videos in these datasets are short, and can be recognized by static scene appearance alone as shown in Figure 4.
Following the chronology, we first present results for early attempts of using deep learning and the two-stream networks at the top of Table 2. We make several observations. First, without motion/temporal modeling, the performance of DeepVideo [99] is inferior to all other approaches. Second, it is helpful to transfer knowledge from traditional methods (non-CNN-based) to deep learning. For example, TDD [214] uses trajectory pooling to extract motion-aware CNN features. TLE [36] embeds global feature encoding, which is an important step in traditional video action recognition pipeline, into a deep network.
按照时间顺序,我们首先展示了使用深度学习和表2顶部的双流网络的早期尝试的结果。我们做了一些观察。首先,没有运动/时间建模,DeepVideo[99]的性能低于所有其他方法。第二,有助于将传统方法(非基于cnn的)的知识转移到深度学习。例如,TDD[214]使用轨迹池来提取运动感知的CNN特征。TLE[36]将全局特征编码(传统视频动作识别管道中的重要一步)嵌入到深度网络中。
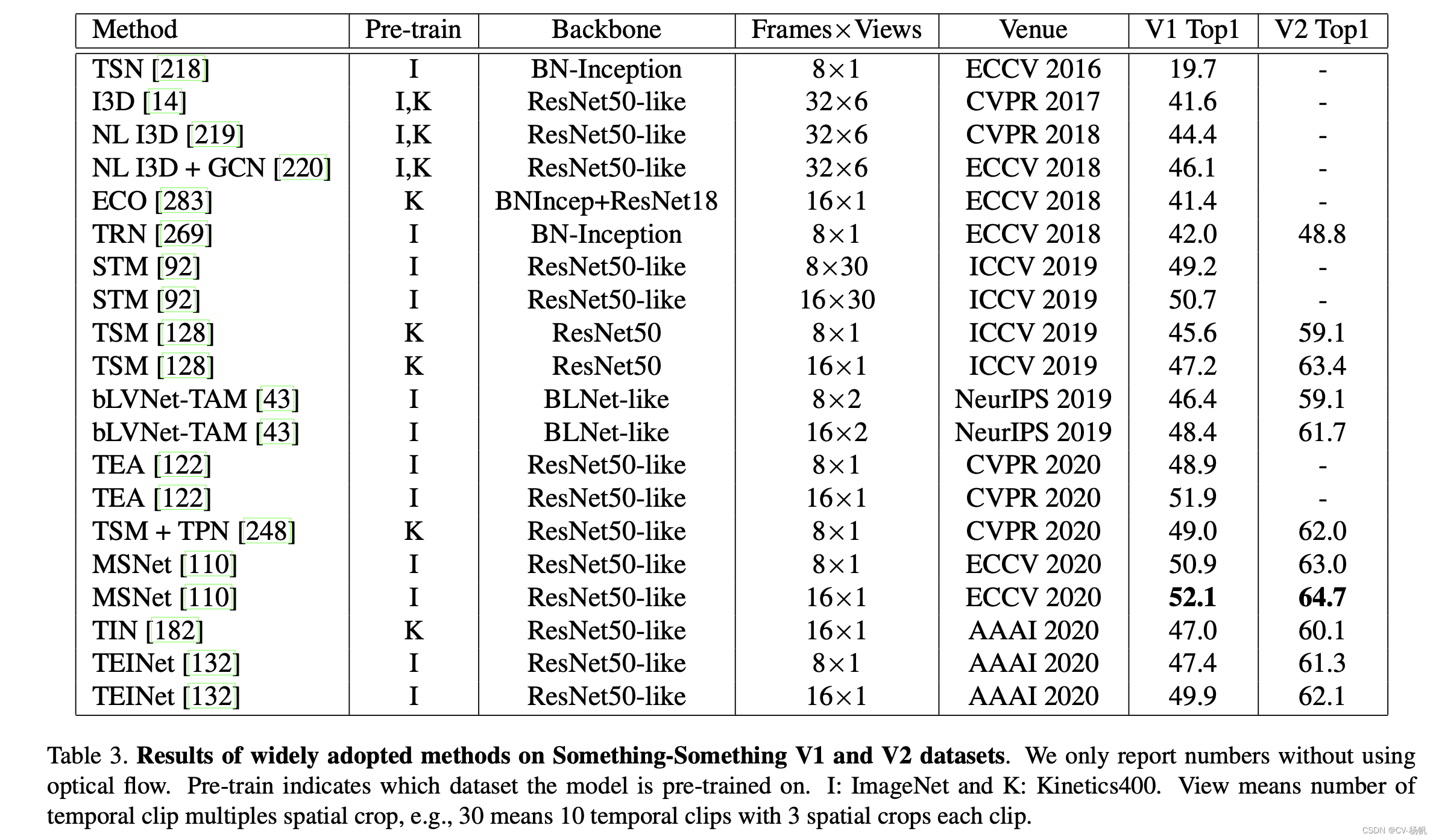
Table 3. Results of widely adopted methods on Something-Something V1 and V2 datasets. We only report numbers without using optical flow. Pre-train indicates which dataset the model is pre-trained on. I: ImageNet and K: Kinetics400. View means number of temporal clip multiples spatial crop, e.g., 30 means 10 temporal clips with 3 spatial crops each clip.
表3。在Something-Something V1和V2数据集上广泛采用的方法的结果。我们只报告数字,不使用光流。预训练指示模型在哪个数据集上进行预训练。I: ImageNet和K: Kinetics400。视图表示时间剪辑的数量乘以空间作物,例如,30表示10个时间剪辑,每个剪辑有3个空间作物。
We then compare 3D CNNs based approaches in the middle of Table 2. Despite training on a large corpus of videos, C3D [202] performs inferior to concurrent work [187, 214, 217], possibly due to difficulties in optimization of 3D kernels. Motivated by this, several papers - I3D [14], P3D [169], R2+1D [204] and S3D [239] factorize 3D convolution filters to 2D spatial kernels and 1D temporal kernels to ease the training. In addition, I3D introduces an inflation strategy to avoid training from scratch by bootstrap-ping the 3D model weights from well-trained 2D networks. By using these techniques, they achieve comparable performance to the best two-stream network methods [36] without the need for optical flow. Furthermore, recent 3D models obtain even higher accuracy, by using more training samples [203], additional pathways [45], or architecture search [44].
然后,我们在表2中间比较了基于3D cnn的方法。尽管在大量的视频语料库上进行训练,C3D[202]的性能不如并发工作[187,214,217],这可能是由于3D内核的优化困难。基于此,I3D[14]、P3D[169]、R2+1D[204]和S3D[239]几篇论文将3D卷积滤波器分解为2D空间核和1D时间核,以简化训练。此外,I3D引入了膨胀策略,通过从训练良好的2D网络引导3D模型权重来避免从头开始训练。通过使用这些技术,他们可以在不需要光流的情况下实现与最好的双流网络方法[36]相当的性能。此外,最近的3D模型通过使用更多的训练样本[203]、额外的路径[45]或架构搜索[44]获得了更高的精度。
Finally, we show recent efficient models in the bottom of Table 2. We can see that these methods are able to achieve higher recognition accuracy than two-stream networks (top), and comparable performance to 3D CNNs (middle). Since they are 2D CNNs and do not use optical flow, these methods are efficient in terms of both training and inference. Most of them are real-time approaches, and some can do online video action recognition [128]. We believe 2D CNN plus temporal modeling is a promising direction due to the need of efficiency. Here, temporal modeling could be attention based, flow based or 3D kernel based.
最后,我们在表2的底部展示了最近的高效模型。我们可以看到,这些方法能够实现比双流网络更高的识别精度(上),性能与3D cnn相当(中)。由于它们是二维cnn,不使用光流,这些方法在训练和推理方面都是有效的。其中大部分是实时方法,有些可以进行在线视频动作识别[128]。由于对效率的需求,我们认为二维CNN加时间建模是一个很有前途的方向。在这里,时间建模可以是基于注意力的,基于流的或基于3D内核的。
4.3. Motion-focused datasets
In this section, we compare the recent state-of-the-art approaches on the 20BN-Something-Something (Sth-Sth) dataset. We report top1 accuracy on both V1 and V2. Sth-Sth datasets focus on humans performing basic actions with daily objects. Different from scene-focused datasets, background scene in Sth-Sth datasets contributes little to the final action class prediction. In addition, there are classes such as “Pushing something from left to right” and “Pushing something from right to left”, and which require strong motion reasoning.
在本节中,我们比较了20BN-Something-Something(某物-某物)数据集上最近最先进的方法。我们报告V1和V2的准确性都是最高的。Sth-Sth数据集关注的是人类对日常对象执行的基本操作。与以场景为中心的数据集不同,Sth-Sth数据集中的背景场景对最终动作类预测的贡献很小。此外,还有“从左向右推东西”和“从右向左推东西”等类,这些类需要强运动推理。
By comparing the previous work in Table 3, we observe that using longer input (e.g., 16 frames) is generally better. Moreover, methods that focus on temporal modeling [128, 122, 92] work better than stacked 3D kernels [14]. For example, TSM [128], TEA [122] and MSNet [110] insert an explicit temporal reasoning module into 2D ResNet backbones and achieves state-of-the-art results. This implies that the Sth-Sth dataset needs strong temporal motion reasoning as well as spatial semantics information.
通过比较表3中之前的工作,我们观察到使用更长的输入(例如,16帧)通常更好。此外,专注于时间建模的方法[128,122,92]比堆叠的3D内核[14]更好。例如,TSM[128]、TEA[122]和MSNet[110]在2D ResNet骨干中插入显式时间推理模块,并获得了最先进的结果。这意味着Sth-Sth数据集需要强大的时间运动推理和空间语义信息。
4.4. Multi-label datasets
In this section, we first compare the recent state-of-the-art approaches on Charades dataset [186] and then we list some recent work that use assemble model or additional object information on Charades.
在本节中,我们首先比较了Charades数据集[186]上最近最先进的方法,然后列出了一些在Charades上使用集合模型或附加对象信息的最新工作。
Comparing the previous work in Table 4, we make the following observations. First, 3D models [229, 45] generally perform better than 2D models [186, 231] and 2D models with optical flow input. This indicates that the spatio-temporal reasoning is critical for long-term complex concurrent action understanding. Second, longer input helps with the recognition [229] probably because some actions require long-term feature to recognize. Third, models with strong backbones that are pre-trained on larger datasets gen-erally have better performance [45]. This is because Charades is a medium-scaled dataset which doesn’t contain enough diversity to train a deep model.
对比表4中之前的工作,我们得出以下观察结果。首先,3D模型[229,45]的性能通常优于2D模型[186,231]和具有光流输入的2D模型。这表明,时空推理对于长期复杂的并发动作理解是至关重要的。其次,较长的输入有助于识别[229],这可能是因为一些动作需要长时间的特征才能识别。第三,在更大的数据集上预先训练的具有强大主干的模型通常具有更好的性能[45]。这是因为Charades是一个中等规模的数据集,不包含足够的多样性来训练一个深度模型。
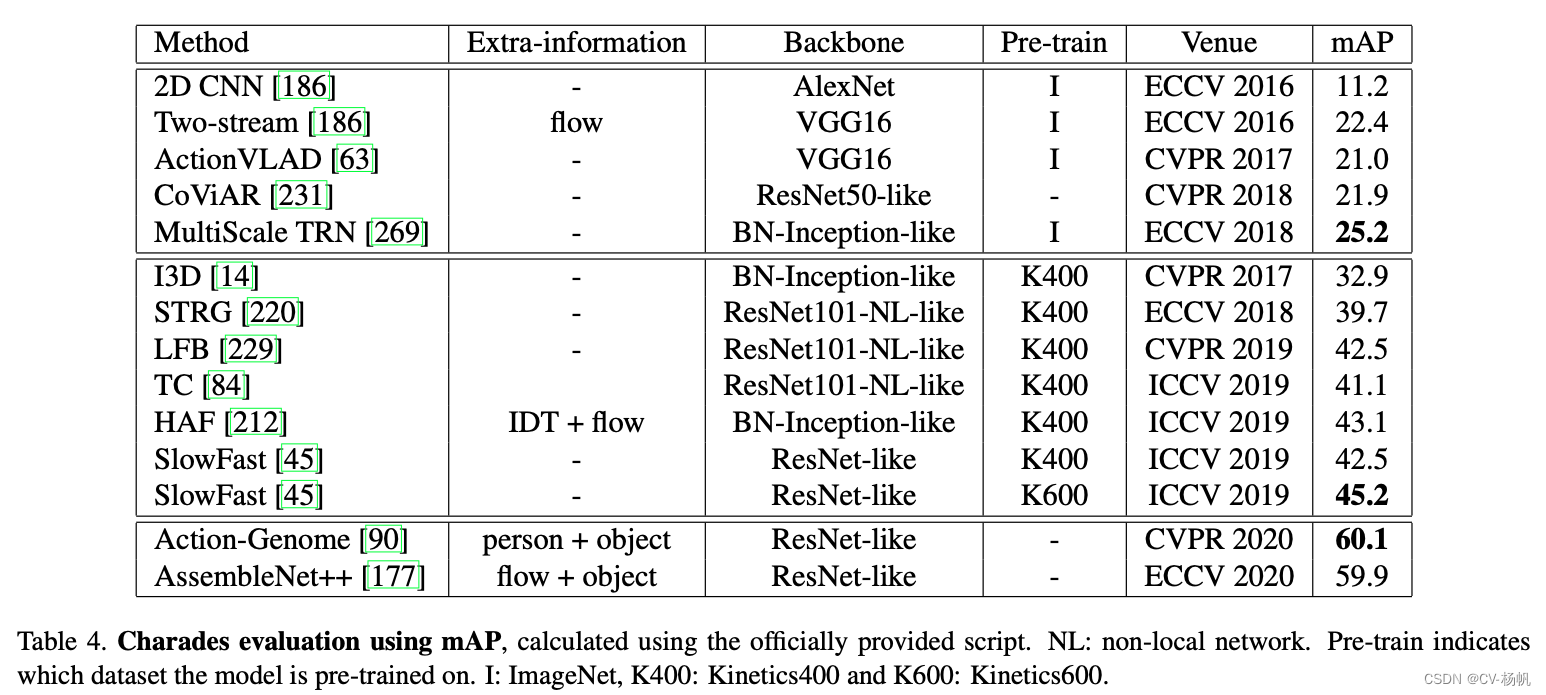
Table 4. Charades evaluation using mAP, calculated using the officially provided script. NL: non-local network. Pre-train indicates which dataset the model is pre-trained on. I: ImageNet, K400: Kinetics400 and K600: Kinetics600.
表4。字谜评估使用mAP,计算使用官方提供的脚本。NL:非本地网络。预训练指示模型在哪个数据集上进行预训练。I: ImageNet, K400: Kinetics400和K600: Kinetics600。
Recently, researchers explored the alternative direction for complex concurrent action recognition by assembling models [177] or providing additional human-object interaction information [90]. These papers significantly outperformed previous literature that only finetune a single model on Charades. It demonstrates that exploring spatio-temporal human-object interactions and finding a way to avoid overfitting are the keys for concurrent action understanding.
最近,研究人员通过组合模型[177]或提供额外的人-物交互信息[90]探索了复杂并发动作识别的替代方向。这些论文明显优于以往的文献,只微调一个模型的猜字谜。研究表明,探索人-物时空交互作用,避免过拟合是并行行为理解的关键。
4.5. Speed comparison
To deploy a model in real-life applications, we usually need to know whether it meets the speed requirement before we can proceed. In this section, we evaluate the approaches mentioned above to perform a thorough comparison in terms of (1) number of parameters, (2) FLOPS, (3) latency and (4) frame per second.
要在实际应用程序中部署模型,我们通常需要知道它是否满足速度要求,然后才能继续。在本节中,我们评估上述方法,根据(1)参数数量、(2)FLOPS、(3)延迟和(4)每秒帧数来执行彻底的比较。
We present the results in Table 5. Here, we use the models in the GluonCV video action recognition model zoo3 since all these models are trained using the same data, same data augmentation strategy and under same 30-view evaluation scheme, thus fair comparison. All the timings are done on a single Tesla V100 GPU with 105 repeated runs, while the first 5 runs are ignored for warming up. We always use a batch size of 1. In terms of model input, we use the suggested settings in the original paper.
我们在表5中展示了结果。在这里,我们使用GluonCV视频动作识别模型zoo3中的模型,因为所有这些模型都使用相同的数据、相同的数据增强策略和相同的30视图评估方案进行训练,因此可以进行公平的比较。所有的计时都是在一个特斯拉V100 GPU上进行105次重复运行,而前5次运行被忽略以进行预热。我们总是使用1的批量大小。在模型输入方面,我们使用了原文中建议的设置。
As we can see in Table 5, if we compare latency, 2D models are much faster than all other 3D variants. This is probably why most real-world video applications still adopt frame-wise methods. Secondly, as mentioned in [170, 259], FLOPS is not strongly correlated with the actual inference time (i.e., latency). Third, if comparing performance, most 3D models give similar accuracy around 75%, but pretraining with a larger dataset can significantly boost the performance4. This indicates the importance of training data and partially suggests that self-supervised pre-training might be a promising way to further improve existing methods.
从表5中我们可以看到,如果我们比较延迟,2D模型比所有其他3D模型都要快得多。这可能就是为什么大多数现实中的视频应用程序仍然采用基于帧的方法。其次,如[170,259]所述,FLOPS与实际推理时间(即延迟)没有很强的相关性。第三,如果比较性能,大多数3D模型的准确率都在75%左右,但使用更大的数据集进行预训练可以显著提高性能4。这表明了训练数据的重要性,并部分表明自我监督的训练前可能是进一步改进现有方法的一种有前途的方式。
5. Discussion and Future Work
We have surveyed more than 200 deep learning based methods for video action recognition since year 2014. Despite the performance on benchmark datasets plateauing, there are many active and promising directions in this task worth exploring.
自2014年以来,我们已经调查了超过200种基于深度学习的视频动作识别方法。尽管在基准数据集上的性能趋于稳定,但在这一任务中仍有许多积极和有前途的方向值得探索。
5.1. Analysis and insights
More and more methods haven been developed to improve video action recognition, at the same time, there are some papers summarizing these methods and providing analysis and insights. Huang et al. [82] perform an explicit analysis of the effect of temporal information for video understanding. They try to answer the question “how important is the motion in the video for recognizing the action”. Feichtenhofer et al. [48, 49] provide an amazing visualization of what two-stream models have learned in order to understand how these deep representations work and what they are capturing. Li et al. [124] introduce a concept, representation bias of a dataset, and find that current datasets are biased towards static representations. Experiments on such biased datasets may lead to erroneous conclusions, which is indeed a big problem that limits the development of video action recognition. Recently, Piergiovanni et al. introduced the AViD [165] dataset to cope with data bias by collecting data from diverse groups of people. These papers provide great insights to help fellow researchers to understand the challenges, open problems and where the next breakthrough might reside.
越来越多的方法被用来改进视频动作识别,同时也有一些论文对这些方法进行了总结和分析。Huang等人[82]对时间信息对视频理解的影响进行了显式分析。他们试图回答“视频中的动作对于识别动作有多重要”这个问题。Feichtenhofer等人[48,49]提供了一个令人惊讶的双流模型的可视化,以了解这些深度表示是如何工作的以及它们捕获了什么。Li等人[124]引入了一个概念,数据集的表示偏差,并发现当前的数据集偏向于静态表示。在这种有偏差的数据集上进行实验可能会得出错误的结论,这确实是限制视频动作识别发展的一大问题。最近,Piergiovanni等人引入了AViD[165]数据集,通过收集来自不同人群的数据来应对数据偏差。这些论文提供了很好的见解,帮助同行的研究人员理解挑战,开放的问题和下一个突破可能在哪里。
5.2. Data augmentation
Numerous data augmentation methods have been proposed in image recognition domain, such as mixup [258], cutout [31], CutMix [254], AutoAugment [27], FastAutoAug [126], etc. However, video action recognition still adopts basic data augmentation techniques introduced before year 2015 [217, 188], including random resizing, random cropping and random horizontal flipping. Recently, SimCLR [17] and other papers have shown that color jittering and random rotation greatly help representation learning. Hence, an investigation of using different data augmentation techniques for video action recognition is particularly useful. This may change the data pre-processing pipeline for all existing methods.
在图像识别领域已经提出了许多数据增强方法,如mixup[258]、cutout[31]、CutMix[254]、AutoAugment[27]、FastAutoAug[126]等。然而,视频动作识别仍然采用2015年之前引入的基础数据增强技术[217,188],包括随机调整大小、随机裁剪和随机水平翻转。最近,SimCLR[17]等论文表明颜色抖动和随机旋转对表示学习有很大帮助。因此,研究使用不同的数据增强技术进行视频动作识别是非常有用的。这可能会改变所有现有方法的数据预处理管道。
5.3. Video domain adaptation
Domain adaptation (DA) has been studied extensively in recent years to address the domain shift problem. Despite the accuracy on standard datasets getting higher and higher, the generalization capability of current video models across datasets or domains is less explored.
域适应(DA)是近年来解决域转移问题的一种广泛研究方法。尽管标准数据集上的精度越来越高,但当前视频模型跨数据集或域的泛化能力研究较少。
There is early work on video domain adaptation [193, 241, 89, 159]. However, these literature focus on small-scale video DA with only a few overlapping categories, which may not reflect the actual domain discrepancy and may lead to biased conclusions. Chen et al. [15] introduce two larger-scale datasets to investigate video DA and find that aligning temporal dynamics is particularly useful. Pan et al. [152] adopts co-attention to solve the temporal misalignment problem. Very recently, Munro et al. [145] explore a multi-modal self-supervision method for fine-grained video action recognition and show the effectiveness of multi-modality learning in video DA. Shuffle and Attend [95] argues that aligning features of all sampled clips results in a sub-optimal solution due to the fact that all clips do not include relevant semantics. Therefore, they propose to use an attention mechanism to focus more on informative clips and discard the non-informative ones. In conclusion, video DA is a promising direction, especially for researchers with less computing resources.
在视频领域适应方面有早期的工作[193,241,89,159]。然而,这些文献关注的是小规模的视频DA,类别重叠较少,可能无法反映实际的领域差异,导致结论存在偏差。Chen等人[15]引入了两个更大规模的数据集来研究视频DA,并发现校准时间动态特别有用。Pan等[152]采用共同注意的方法解决时间不对中问题。最近,Munro等人[145]探索了一种用于细粒度视频动作识别的多模态自监督方法,并展示了视频DA中多模态学习的有效性。Shuffle和Attend[95]认为,对齐所有采样剪辑的特征会导致次优解决方案,因为所有剪辑都不包含相关语义。因此,他们建议使用一种注意力机制,更多地关注有信息的片段,丢弃无信息的片段。总之,视频DA是一个很有前途的方向,特别是对于计算资源较少的研究人员。
5.4. Neural architecture search
Neural architecture search (NAS) has attracted great interest in recent years and is a promising research direction. However, given its greedy need for computing resources, only a few papers have been published in this area [156, 163, 161, 178]. The TVN family [161], which jointly optimize parameters and runtime, can achieve competitive accuracy with human-designed contemporary models, and run much faster (within 37 to 100 ms on a CPU and 10 ms on a GPU per 1 second video clip). AssembleNet [178] and AssembleNet++ [177] provide a generic approach to learn the connectivity among feature representations across input modalities, and show surprisingly good performance on Charades and other benchmarks. AttentionNAS [222] proposed a solution for spatio-temporal attention cell search. The found cell can be plugged into any network to improve the spatio-temporal features. All previous papers do show their potential for video understanding.
神经结构搜索(NAS)近年来引起了人们的广泛关注,是一个很有前途的研究方向。然而,由于其对计算资源的巨大需求,该领域的论文发表较少[156,163,161,178]。TVN系列[161]联合优化了参数和运行时,可以达到与人类设计的同时代模型具有竞争力的精度,并且运行速度更快(每1秒视频剪辑在CPU上为37 - 100毫秒,在GPU上为10毫秒)。AssembleNet[178]和assemblenet++[177]提供了一种通用的方法来学习跨输入模式的特征表示之间的连通性,并在Charades和其他基准测试中显示出惊人的良好性能。AttentionNAS[222]提出了一种时空注意细胞搜索的解决方案。发现的细胞可以插入到任何网络,以改善时空特征。所有之前的论文都显示了视频理解的潜力。
Recently, some efficient ways of searching architectures have been proposed in the image recognition domain, such as DARTS [130], Proxyless NAS [11], ENAS [160], one-shot NAS [7], etc. It would be interesting to combine efficient 2D CNNs and efficient searching algorithms to perform video NAS for a reasonable cost.
近年来,在图像识别领域提出了一些高效的搜索架构方法,如DARTS[130]、Proxyless NAS[11]、ENAS[160]、one-shot NAS[7]等。将高效的2D cnn和高效的搜索算法结合起来以合理的成本执行视频NAS将是一件有趣的事情。
5.5. Efficient model development
Despite their accuracy, it is difficult to deploy deep learning based methods for video understanding problems in terms of real-world applications. There are several major challenges: (1) most methods are developed in offline settings, which means the input is a short video clip, not a video stream in an online setting; (2) most methods do not meet the real-time requirement; (3) incompatibility of 3D convolutions or other non-standard operators on non-GPU devices (e.g., edge devices).
尽管其精确度很高,但在现实应用中,很难将基于深度学习的方法应用于视频理解问题。有几个主要的挑战:(1)大多数方法是在离线设置下开发的,这意味着输入是一个短视频剪辑,而不是在线设置下的视频流;(2)大多数方法不能满足实时性要求;(3)在非gpu设备(如边缘设备)上不兼容3D卷积或其他非标准运算符。
Hence, the development of efficient network architecture based on 2D convolutions is a promising direction. The approaches proposed in the image classification domain can be easily adapted to video action recognition, e.g. model compression, model quantization, model pruning, distributed training [68, 127], mobile networks [80, 265], mixed precision training, etc. However, more effort is needed for the online setting since the input to most action recognition applications is a video stream, such as surveillance monitoring. We may need a new and more comprehensive dataset for benchmarking online video action recognition methods. Lastly, using compressed videos might be desirable because most videos are already compressed, and we have free access to motion information.
因此,开发基于二维卷积的高效网络体系结构是一个很有前途的方向。在图像分类领域提出的方法可以很容易地适用于视频动作识别,例如模型压缩、模型量化、模型修剪、分布式训练[68,127]、移动网络[80,265]、混合精确训练等。然而,由于大多数动作识别应用程序的输入是视频流,例如监视监控,因此在线设置需要付出更多努力。我们可能需要一个新的、更全面的数据集来对标在线视频动作识别方法。最后,使用压缩视频可能是可取的,因为大多数视频已经被压缩了,我们可以免费访问运动信息。
5.6. New datasets
Data is more or at least as important as model development for machine learning. For video action recognition, most datasets are biased towards spatial representations [124], i.e., most actions can be recognized by a single frame inside the video without considering the temporal movement. Hence, a new dataset in terms of long-term temporal modeling is required to advance video understanding. Furthermore, most current datasets are collected from YouTube. Due to copyright/privacy issues, the dataset organizer often only releases the YouTube id or video link for users to download and not the actual video. The first problem is that downloading the large-scale datasets might be slow for some regions. In particular, YouTube recently started to block massive downloading from a single IP. Thus, many researchers may not even get the dataset to start working in this field. The second problem is, due to region limitation and privacy issues, some videos are not accessible anymore. For example, the original Kinetcis400 dataset has over 300K videos, but at this moment, we can only crawl about 280K videos. On average, we lose 5% of the videos every year. It is impossible to do fair comparisons between methods when they are trained and evaluated on different data.
对于机器学习来说,数据与模型开发同等重要。对于视频动作识别,大多数数据集都偏向于空间表示[124],即大多数动作可以被视频内的单个帧识别,而不考虑时间运动。因此,在长期时间建模方面,需要一个新的数据集来推进视频理解。此外,大多数当前的数据集都来自YouTube。由于版权/隐私问题,数据集组织者通常只发布YouTube id或视频链接供用户下载,而不是实际的视频。第一个问题是,对某些地区来说,下载大规模数据集可能很慢。特别是,YouTube最近开始阻止从单个IP进行大规模下载。因此,许多研究人员甚至可能还没有得到数据集就开始在这个领域工作。第二个问题是,由于地域限制和隐私问题,一些视频无法访问。例如,原始的Kinetcis400数据集有超过300K的视频,但目前,我们只能抓取大约280K的视频。平均来说,我们每年会损失5%的视频。当使用不同的数据进行训练和评估时,不可能在方法之间进行公平的比较。
5.7. Video adversarial attack
Adversarial examples have been well studied on image models. [199] first shows that an adversarial sample, computed by inserting a small amount of noise on the original image, may lead to a wrong prediction. However, limited work has been done on attacking video models.
对抗的例子已经在图像模型上得到了很好的研究。[199]首先表明,通过在原始图像上插入少量噪声计算的对抗样本可能会导致错误的预测。然而,针对攻击视频模型的研究还很有限。
This task usually considers two settings, a white-box attack [86, 119, 66, 21] where the adversary can always get the full access to the model including exact gradients of a given input, or a black-box one [93, 245, 226], in which the structure and parameters of the model are blocked so that the attacker can only access the (input, output) pair through queries. Recent work ME-Sampler [260] leverages the motion information directly in generating adversarial videos, and is shown to successfully attack a number of video classification models using many fewer queries. In summary, this direction is useful since many companies provide APIs for services such as video classification, anomaly detection, shot detection, face detection, etc. In addition, this topic is also related to detecting DeepFake videos. Hence, investigating both attacking and defending methods is crucial to keeping these video services safe.
该任务通常考虑两种设置,一种是白盒攻击[86,11,66,21],其中攻击者总是可以获得对模型的完全访问权,包括给定输入的精确梯度,另一种是黑盒攻击[93,245,226],在这种攻击中,模型的结构和参数被阻止,因此攻击者只能通过查询访问(输入,输出)对。最近的工作ME-Sampler[260]在生成对抗视频时直接利用了运动信息,并被证明可以使用更少的查询成功地攻击许多视频分类模型。总之,这个方向是有用的,因为许多公司为视频分类、异常检测、镜头检测、人脸检测等服务提供api。此外,本课题还与检测DeepFake视频有关。因此,研究攻击和防御方法对于保证这些视频服务的安全至关重要。
5.8. Zero-shot action recognition
Zero-shot learning (ZSL) has been trending in the image understanding domain, and has recently been adapted to video action recognition. Its goal is to transfer the learned knowledge to classify previously unseen categories. Due to (1) the expensive data sourcing and annotation and (2) the set of possible human actions is huge, zero-shot action recognition is a very useful task for real-world applications.
零镜头学习(ZSL)已经成为图像理解领域的一个趋势,最近被应用到视频动作识别中。它的目标是将学到的知识转化为以前从未见过的分类。由于(1)昂贵的数据来源和注释,(2)可能的人类动作的集合是巨大的,零动作识别是一个非常有用的现实应用程序的任务。
There are many early attempts [242, 88, 243, 137, 168, 57] in this direction. Most of them follow a standard framework, which is to first extract visual features from videos using a pretrained network, and then train a joint model that maps the visual embedding to a semantic embedding space. In this manner, the model can be applied to new classes by finding the test class whose embedding is the nearest-neighbor of the model’s output. A recent work URL [279] proposes to learn a universal representation that generalizes across datasets. Following URL [279], [10] present the first end-to-end ZSL action recognition model. They also establish a new ZSL training and evaluation protocol, and provide an in-depth analysis to further advance this field. Inspired by the success of pre-training and then zero-shot in NLP domain, we believe ZSL action recognition is a promising research topic.
在这个方向上有许多早期的尝试[242,88,243,137,168,57]。它们大多遵循一个标准框架,即首先使用预训练的网络从视频中提取视觉特征,然后训练一个联合模型,将视觉嵌入映射到语义嵌入空间。通过这种方式,通过找到其嵌入是模型输出的最近邻居的测试类,可以将模型应用于新的类。最近的一项工作URL[279]提出学习一种跨数据集的通用表示。继URL[279]之后,[10]提出了第一个端到端ZSL动作识别模型。他们还建立了新的ZSL培训和评估协议,并提供了深入的分析,以进一步推进该领域。受自然语言处理领域先训练后零射成功的启发,我们认为ZSL动作识别是一个很有前途的研究课题。
5.9. Weakly-supervised video action recognition
Building a high-quality video action recognition dataset [190, 100] usually requires multiple laborious steps: 1) first sourcing a large amount of raw videos, typically from the internet; 2) removing videos irrelevant to the categories in the dataset; 3) manually trimming the video segments that have actions of interest; 4) refining the categorical labels. Weakly-supervised action recognition explores how to reduce the cost for curating training data.
构建一个高质量的视频动作识别数据集[190,100]通常需要多个艰难的步骤:1)首先从互联网上获取大量原始视频;2)删除与数据集中类别无关的视频;3)手动裁剪有兴趣动作的视频片段;4)细化分类标签。弱监督动作识别探讨了如何降低训练数据策划的成本。
The first direction of research [19, 60, 58] aims to reduce the cost of sourcing videos and accurate categorical labeling. They design training methods that use training data such as action-related images or partially annotated videos, gathered from publicly available sources such as Internet. Thus this paradigm is also referred to as webly-supervised learning [19, 58]. Recent work on omni-supervised learning [60, 64, 38] also follows this paradigm but features bootstrapping on unlabelled videos by distilling the models’ own inference results.
第一个研究方向[19,60,58]旨在降低视频来源的成本和准确的分类标签。他们设计训练方法,使用训练数据,如动作相关的图像或部分注释的视频,收集自公开来源,如互联网。因此,这种范式也被称为网络监督学习[19,58]。最近关于全监督学习的研究[60,64,38]也遵循这一范式,但通过提取模型自身的推理结果,对无标签视频进行自引导。
The second direction aims at removing trimming, the most time consuming part in annotation. UntrimmedNet [216] proposed a method to learn action recognition model on untrimmed videos with only categorical labels [149, 172]. This task is also related to weakly-supervised temporal action localization which aims to automatically generate the temporal span of the actions. Several papers propose to simultaneously [155] or iteratively [184] learn models for these two tasks.
第二个方向是去除注释中最耗时的部分修剪。UntrimmedNet[216]提出了一种方法,在只有分类标签的未裁剪视频上学习动作识别模型[149,172]。此任务还与弱监督的时间动作定位相关,其目的是自动生成动作的时间跨度。几篇论文建议同时[155]或迭代[184]学习这两个任务的模型。
5.10. Fine-grained video action recognition
Popular action recognition datasets, such as UCF101 [190] or Kinetics400 [100], mostly comprise actions happening in various scenes. However, models learned on these datasets could overfit to contextual information irrelevant to the actions [224, 227, 24]. Several datasets have been proposed to study the problem of fine-grained action recognition, which could examine the models’ capacities in modeling action specific information. These datasets comprise fine-grained actions in human activities such as cooking [28, 108, 174], working [103] and sports [181, 124]. For example, FineGym [181] is a recent large dataset annotated with different moves and sub-actions in gymnastic videos.
流行的动作识别数据集,如UCF101[190]或Kinetics400[100],大多包含发生在不同场景中的动作。然而,在这些数据集上学习的模型可能会过度拟合与动作无关的上下文信息[224,227,24]。研究细粒度动作识别问题的数据集可以检验模型在动作特定信息建模方面的能力。这些数据集包括烹饪[28,108,174]、工作[103]和体育[181,124]等人类活动中的细粒度动作。例如,FineGym[181]是最近的一个大型数据集,在体操视频中注释了不同的动作和子动作。
5.11. Egocentric action recognition
Recently, large-scale egocentric action recognition [29, 28] has attracted increasing interest with the emerging of wearable cameras devices. Egocentric action recognition requires a fine understanding of hand motion and the interacting objects in the complex environment. A few papers leverage object detection features to offer fine object context to improve egocentric video recognition [136, 223, 229, 180]. Others incorporate spatio-temporal attention [192] or gaze annotations [131] to localize the interacting object to facilitate action recognition. Similar to third-person action recognition, multi-modal inputs (e.g., optical flow and audio) have been demonstrated to be effective in egocentric action recognition [101].
近年来,随着可穿戴相机设备的出现,大规模以自我为中心的动作识别[29,28]引起了越来越多的关注。以自我为中心的动作识别需要对手部运动和复杂环境中相互作用的物体有很好的理解。一些论文利用对象检测特征提供精细的对象上下文来改进以自我为中心的视频识别[136,223,229,180]。其他方法则结合时空注意力[192]或凝视注释[131]来定位交互对象,以促进动作识别。与第三人动作识别类似,多模态输入(如光流和音频)已被证明在自我中心动作识别中是有效的[101]。
5.12. Multi-modality
Multi-modal video understanding has attracted increasing attention in recent years [55, 3, 129, 167, 154, 2, 105]. There are two main categories for multi-modal video understanding. The first group of approaches use multi-modalities such as scene, object, motion, and audio to enrich the video representations. In the second group, the goal is to design a model which utilizes modality information as a supervision signal for pre-training models [195, 138, 249, 62, 2].
近年来,多模态视频理解越来越受到关注[55,3,129,167,154,2,105]。多模态视频理解主要有两类。第一组方法使用场景、物体、运动和音频等多模式来丰富视频表现。第二组的目标是设计一个模型,该模型利用情态信息作为预训练模型的监督信号[195,138,249,62,2]。
Multi-modality for comprehensive video understanding Learning a robust and comprehensive representation of video is extremely challenging due to the complexity of semantics in videos. Video data often includes variations in different forms including appearance, motion, audio, text or scene [55, 129, 166]. Therefore, utilizing these multi-modal representations is a critical step in understanding video content more efficiently. The multi-modal representations of video can be approximated by gathering representations of various modalities such as scene, object, audio, motion, appearance and text. Ngiam et al. [148] was an early attempt to suggest using multiple modalities to obtain better features. They utilized videos of lips and their corresponding speech for multi-modal representation learning. Miech et al. [139] proposed a mixture-of embedding-experts model to combine multiple modalities including motion, appearance, audio, and face features and learn the shared embedding space between these modalities and text. Roig et al. [175] combines multiple modalities such as action, scene, object and acoustic event features in a pyramidal structure for action recognition. They show that adding each modality improves the final action recognition accuracy. Both CE [129] and MMT [55], follow a similar research line to [139] where the goal is to combine multiple-modalities to obtain a comprehensive representation of video for joint video-text representation learning. Piergiovanni et al. [166] utilized textual data together with video data to learn a joint embedding space. Using this learned joint embedding space, the method is capable of doing zero-shot action recognition. This line of research is promising due to the availability of strong semantic extraction models and also success of transformers on both vision and language tasks.
由于视频中语义的复杂性,学习一个健壮的、全面的视频表示是非常具有挑战性的。视频数据通常包括不同形式的变化,包括外观、运动、音频、文本或场景[55,129,166]。因此,利用这些多模态表示是更有效地理解视频内容的关键步骤。视频的多模态表示可以通过收集诸如场景、对象、音频、运动、外观和文本等各种形式的表示来近似。Ngiam等人[148]是一个早期的尝试,建议使用多种模式来获得更好的特征。他们利用嘴唇和相应的语音视频进行多模态表征学习。Miech等人[139]提出了一种混合嵌入专家模型,将包括运动、外观、音频和面部特征在内的多种模态结合起来,并学习这些模态与文本之间的共享嵌入空间。Roig等人[175]将动作、场景、物体和声学事件特征等多种模式结合在一个金字塔结构中进行动作识别。结果表明,添加各种模态可以提高最终动作的识别精度。CE[129]和MMT[55]都遵循与[139]相似的研究路线,其目标是结合多种模式来获得视频的综合表示,用于联合视频-文本表示学习。Piergiovanni等人[166]利用文本数据和视频数据一起学习联合嵌入空间。利用学习得到的关节嵌入空间,该方法能够实现零镜头动作识别。由于强语义提取模型的可用性以及在视觉和语言任务上的转换器的成功,这一研究方向很有前途。
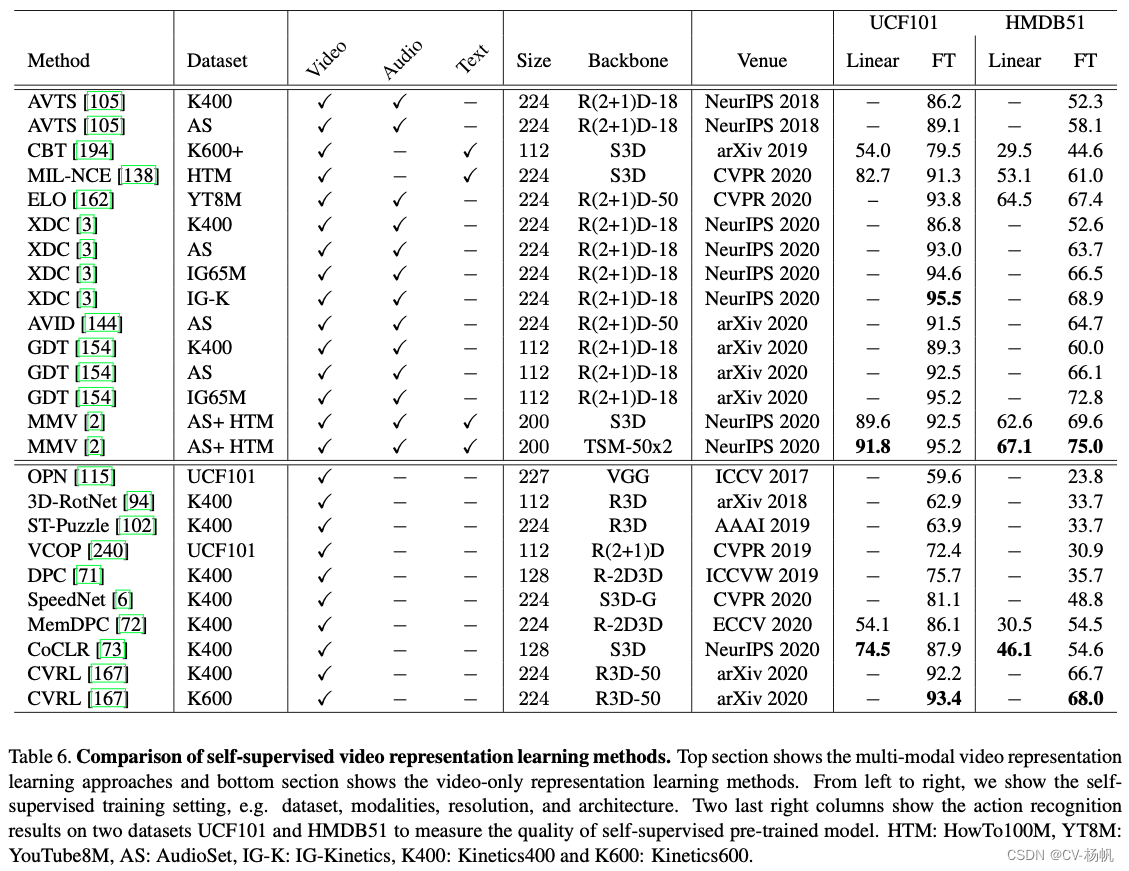
Table 6. Comparison of self-supervised video representation learning methods. Top section shows the multi-modal video representation learning approaches and bottom section shows the video-only representation learning methods. From left to right, we show the self-supervised training setting, e.g. dataset, modalities, resolution, and architecture. Two last right columns show the action recognition results on two datasets UCF101 and HMDB51 to measure the quality of self-supervised pre-trained model. HTM: HowTo100M, YT8M: YouTube8M, AS: AudioSet, IG-K: IG-Kinetics, K400: Kinetics400 and K600: Kinetics600.
表6所示。自监督视频表示学习方法的比较。上半部分为多模态视频表示学习方法,下半部分为纯视频表示学习方法。从左到右,我们展示了自我监督的训练设置,例如数据集、模式、分辨率和架构。右最后两列显示了在UCF101和HMDB51两个数据集上的动作识别结果,以衡量自监督预训练模型的质量。HTM: HowTo100M, YT8M: YouTube8M, AS: AudioSet, IG-K: IG-Kinetics, K400: Kinetics400和K600: Kinetics600。
Multi-modality for self-supervised video representation learning Most videos contain multiple modalities such as audio or text/caption. These modalities are great source of supervision for learning video representations [3, 144, 154, 2, 162]. Korbar et al. [105] incorporated the natural synchronization between audio and video as a supervision signal in their contrastive learning objective for selfsupervised representation learning. In multi-modal self-supervised representation learning, the dataset plays an im-portant role. VideoBERT [195] collected 310K cooking videos from YouTube. However, this dataset is not publicly available. Similar to BERT, VideoBERT used a “masked language model” training objective and also quantized the visual representations into “visual words”. Miech et al. [140] introduced HowTo100M dataset in 2019. This dataset includes 136M clips from 1.22M videos with their corresponding text. They collected the dataset from YouTube with the aim of obtaining instructional videos (how to perform an activity). In total, it covers 23.6K instructional tasks. MIL-NCE [138] used this dataset for self-supervised cross-modal representation learning. They tackled the problem of visually misaligned narrations, by considering multiple positive pairs in the contrastive learning objective. Act-BERT [275], utilized HowTo100M dataset for pre-training of the model in a self-supervised way. They incorporated visual, action, text and object features for cross modal representation learning. Recently AVLnet [176] and MMV [2] considered three modalities visual, audio and language for self-supervised representation learning. This research direction is also increasingly getting more attention due to the success of contrastive learning on many vision and language tasks and the access to the abundance of unlabeled multimodal video data on platforms such as YouTube, Instagram or Flickr. The top section of Table 6 compares multi-modal self-supervised representation learning methods. We will discuss more work on video-only representation learning in the next section.
用于自我监督视频表示学习的多模态大多数视频包含多种模态,如音频或文本/标题。这些模式是学习视频表示的重要监督来源[3,144,154,2,162]。Korbar等人[105]将音频和视频之间的自然同步作为监督信号纳入了自我监督表示学习的对比学习目标中。在多模态自监督表示学习中,数据集起着重要的作用。VideoBERT[195]从YouTube上收集了310K个烹饪视频。然而,该数据集尚未公开。与BERT类似,VideoBERT使用了“遮蔽语言模型”的训练目标,也将视觉表示量化为“视觉词”。Miech等人[140]于2019年介绍了HowTo100M数据集。该数据集包括1.22M视频中的136M剪辑和相应的文本。他们从YouTube上收集数据集,目的是获得教学视频(如何执行一项活动)。它总共涵盖23.6K教学任务。MIL-NCE[138]使用该数据集进行自监督跨模态表示学习。他们通过在对比学习目标中考虑多个正对来解决视觉失调的叙述问题。Act-BERT[275],利用HowTo100M数据集以自监督的方式对模型进行预训练。它们结合了视觉、动作、文本和对象特征进行跨模态表示学习。最近AVLnet[176]和MMV[2]考虑了三种形式的自我监督表现学习视觉,音频和语言。由于对比学习在许多视觉和语言任务上的成功,以及YouTube、Instagram或Flickr等平台上大量未标记的多模态视频数据的访问,这一研究方向也越来越受到关注。表6的上半部分比较了多模态自监督表示学习方法。我们将在下一节中讨论更多关于纯视频表示学习的工作。
5.13. Self-supervised video representation learning
Self-supervised learning has attracted more attention recently as it is able to leverage a large amount of unlabeled data by designing a pretext task to obtain free supervisory signals from data itself. It first emerged in image representation learning. On images, the first stream of papers aimed at designing pretext tasks for completing missing information, such as image coloring [262] and image reordering [153, 61, 263]. The second stream of papers uses instance discrimination [235] as the pretext task and contrastive losses [235, 151] for supervision. They learn visual representation by modeling visual similarity of object instances without class labels [235, 75, 201, 18, 17].
自监督学习是一种利用大量未标记数据,设计借口任务从数据本身获取自由监督信号的学习方法,近年来备受关注。它首先出现在图像表示学习中。关于图像,第一组论文旨在设计借口任务来完成缺失的信息,如图像着色[262]和图像重新排序[153,61,263]。第二批论文以实例区别[235]为托词,以对比损失[235,151]为监督。他们通过对没有类标签的对象实例的可视化相似度建模来学习可视化表示[235,75,201,18,17]。
Self-supervised learning is also viable for videos. Compared with images, videos has another axis, temporal dimension, which we can use to craft pretext tasks. Information completion tasks for this purpose include predicting the correct order of shuffled frames [141, 52] and video clips [240]. Jing et al. [94] focus on the spatial dimension only by predicting the rotation angles of rotated video clips. Combining temporal and spatial information, several tasks have been introduced to solve a space-time cubic puzzle, anticipate future frames [208], forecast long-term motions [134] and predict motion and appearance statistics [211]. RSPNet [16] and visual tempo [247] exploit the relative speed between video clips as a supervision signal.
自我监督学习在视频中也是可行的。与图像相比,视频还有一个轴,即时间维度,我们可以利用它来制作借口任务。为此目的的信息完成任务包括预测打乱的帧[141,52]和视频剪辑[240]的正确顺序。Jing等[94]只通过预测旋转视频片段的旋转角度来关注空间维度。结合时间和空间信息,几个任务被引入来解决时空立方难题,预测未来帧[208],预测长期运动[134],预测运动和外观统计[211]。RSPNet[16]和visual tempo[247]利用视频片段之间的相对速度作为监控信号。
The added temporal axis can also provide flexibility in designing instance discrimination pretexts [67, 167]. Inspired by the decoupling of 3D convolution to spatial and temporal separable convolutions [239], Zhang et al. [266] proposed to decouple the video representation learning into two sub-tasks: spatial contrast and temporal contrast. Recently, Han et al. [72] proposed memory augmented dense predictive coding for self-supervised video representation learning. They split each video into several blocks and the embedding of future block is predicted by the combination of condensed representations in memory.
增加的时间轴还可以为设计实例区别借口提供灵活性[67,167]。受3D卷积解耦为时空可分离卷积的启发[239],Zhang等人[266]提出将视频表示学习解耦为两个子任务:空间对比和时间对比。最近,Han等人[72]提出了用于自监督视频表示学习的记忆增强密集预测编码。他们将每个视频分割成几个块,并通过在内存中组合压缩表示来预测未来块的嵌入。
The temporal continuity in videos inspires researchers to design other pretext tasks around correspondence. Wang et al. [221] proposed to learn representation by performing cycle-consistency tracking. Specifically, they track the same object backward and then forward in the consecutive video frames, and use the inconsistency between the start and end points as the loss function. TCC [39] is a concurrent paper. Instead of tracking local objects, [39] used cycle-consistency to perform frame-wise temporal alignment as a supervision signal. [120] was a follow-up work of [221], and utilized both object-level and pixel-level correspondence across video frames. Recently, long-range temporal correspondence is modelled as a random walk graph to help learning video representation in [87].
视频中的时间连续性激励研究人员围绕通信设计其他借口任务。Wang等人[221]提出通过执行周期一致性跟踪来学习表示。具体来说,它们在连续的视频帧中,先向后跟踪同一个物体,然后向前跟踪,并使用起始点和结束点之间的不一致作为损失函数。TCC[39]是一篇并发论文。[39]不是跟踪本地对象,而是使用周期一致性执行帧相关的时间对齐作为监督信号。[120]是[221]的后续工作,并利用了跨视频帧的对象级和像素级通信。最近,远程时间对应被建模为随机游走图,以帮助学习视频表示[87]。
We compare video self-supervised representation learning methods at the bottom section of Table 6. A clear trend can be observed that recent papers have achieved much better linear evaluation accuracy and fine-tuning accuracy comparable to supervised pre-training. This shows that self-supervised learning could be a promising direction towards learning better video representations.
我们在表6的底部部分比较了视频自监督表示学习方法。可以观察到一个明显的趋势,最近的论文取得了更好的线性评价精度和微调精度可比监督前训练。这表明,自我监督学习可能是学习更好的视频表示的一个有前途的方向。
6. Conclusion
In this survey, we present a comprehensive review of 200+ deep learning based recent approaches to video action recognition. Although this is not an exhaustive list, we hope the survey serves as an easy-to-follow tutorial for those seeking to enter the field, and an inspiring discussion for those seeking to find new research directions.
在本次调查中,我们全面回顾了200多个基于深度学习的视频动作识别最新方法。虽然这不是一个详尽的列表,我们希望调查可以成为那些寻求进入该领域的人的一个易于遵循的指南,并为那些寻求新的研究方向的人提供一个鼓舞人心的讨论。
参考
行为识别 - A Comprehensive Study of Deep Video Action Recognition
视频理解论文综述
Video Action Recognition浅析(一)
A Comprehensive Study of Deep Video Action Recognition
A Comprehensive Study of Deep Video Action Recognition 论文笔记