写在前面
1、本文内容
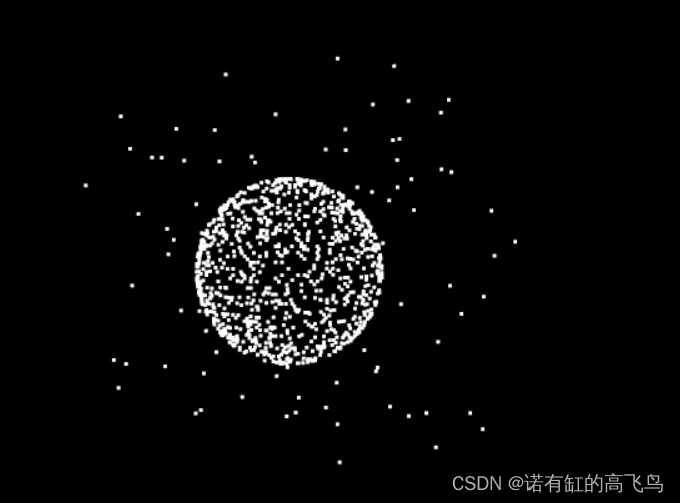
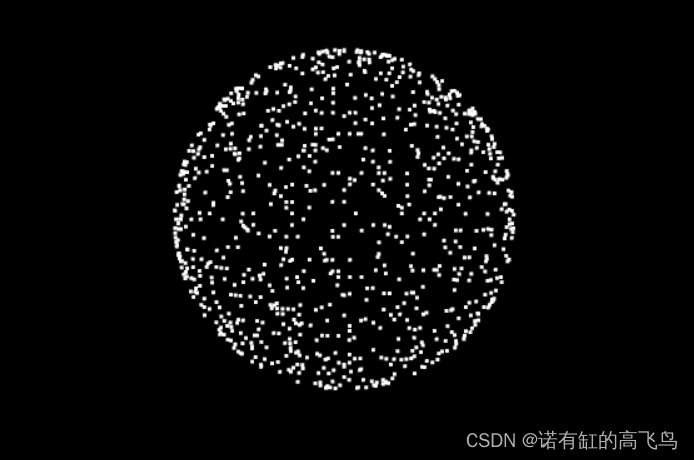
球面点云的生成,添加噪声后,pc实现用已知参数模型提取点云
2、平台
pcl 1.10.0
3、转载请注明出处:
https://blog.csdn.net/qq_41102371/article/details/127141692
code
model_outlier_removal.cpp
#include <iostream>
#include <pcl/point_types.h>
#include <pcl/filters/model_outlier_removal.h>
#include <pcl/visualization/pcl_visualizer.h>
using namespace std::chrono_literals;
pcl::visualization::PCLVisualizer::Ptr
simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
pcl::visualization::PCLVisualizer::Ptr viewer(
new pcl::visualization::PCLVisualizer("3D Viewer"));
viewer->setBackgroundColor(0, 0, 0);
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
viewer->setPointCloudRenderingProperties(
pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
// viewer->addCoordinateSystem (1.0, "global");
viewer->initCameraParameters();
return (viewer);
}
int
main ()
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_sphere_filtered (new pcl::PointCloud<pcl::PointXYZ>);
// 1. Generate cloud data
int noise_size = 100;
int sphere_data_size = 1000;
cloud->width = noise_size + sphere_data_size;
cloud->height = 1;
cloud->points.resize (cloud->width * cloud->height);
// 1.1 Add noise
for (std::size_t i = 0; i < noise_size; ++i)
{
cloud->points[i].x = 4 * rand () / (RAND_MAX + 1.0f)-2;
cloud->points[i].y = 4 * rand () / (RAND_MAX + 1.0f)-2;
cloud->points[i].z = 4 * rand () / (RAND_MAX + 1.0f)-2;
}
// 1.2 Add sphere:
double rand_x1 = 1;
double rand_x2 = 1;
for (std::size_t i = noise_size; i < noise_size + sphere_data_size; ++i)
{
// See: http://mathworld.wolfram.com/SpherePointPicking.html
while (pow (rand_x1, 2) + pow (rand_x2, 2) >= 1)
{
rand_x1 = (rand () % 100) / (50.0f) - 1;
rand_x2 = (rand () % 100) / (50.0f) - 1;
}
double pre_calc = sqrt (1 - pow (rand_x1, 2) - pow (rand_x2, 2));
cloud->points[i].x = 2 * rand_x1 * pre_calc;
cloud->points[i].y = 2 * rand_x2 * pre_calc;
cloud->points[i].z = 1 - 2 * (pow (rand_x1, 2) + pow (rand_x2, 2));
rand_x1 = 1;
rand_x2 = 1;
}
//std::cerr << "Cloud before filtering: " << std::endl;
//for (std::size_t i = 0; i < cloud->points.size (); ++i)
// std::cout << " " << cloud->points[i].x << " " << cloud->points[i].y << " " << cloud->points[i].z << std::endl;
// 2. filter sphere:
// 2.1 generate model:
// modelparameter for this sphere:
// position.x: 0, position.y: 0, position.z:0, radius: 1
pcl::ModelCoefficients sphere_coeff;
sphere_coeff.values.resize (4);
sphere_coeff.values[0] = 0;
sphere_coeff.values[1] = 0;
sphere_coeff.values[2] = 0;
sphere_coeff.values[3] = 1;
pcl::ModelOutlierRemoval<pcl::PointXYZ> sphere_filter;
sphere_filter.setModelCoefficients (sphere_coeff);
sphere_filter.setThreshold (0.05);
sphere_filter.setModelType (pcl::SACMODEL_SPHERE);
sphere_filter.setInputCloud (cloud);
sphere_filter.filter (*cloud_sphere_filtered);
//std::cerr << "Sphere after filtering: " << std::endl;
//for (std::size_t i = 0; i < cloud_sphere_filtered->points.size (); ++i)
// std::cout << " " << cloud_sphere_filtered->points[i].x << " " << cloud_sphere_filtered->points[i].y << " " << cloud_sphere_filtered->points[i].z
// << std::endl;
pcl::visualization::PCLVisualizer::Ptr viewer;
viewer = simpleVis(cloud);
while (!viewer->wasStopped()) {
viewer->spinOnce(100);
std::this_thread::sleep_for(100ms);
}
viewer = simpleVis(cloud_sphere_filtered);
while (!viewer->wasStopped()) {
viewer->spinOnce(100);
std::this_thread::sleep_for(100ms);
}
return (0);
}
CMakeLists.txt
cmake_minimum_required(VERSION 2.8 FATAL_ERROR)
project(model_outlier_removal)
find_package(PCL 1.7 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (model_outlier_removal model_outlier_removal.cpp)
target_link_libraries (model_outlier_removal ${PCL_LIBRARIES})
compile&run
cmake -DCMAKE_BUILD_TYPE=Release -DPCL_DIR="YOUR_PATH/PCL 1.10.0/cmake" -S ./ -B ./build
cmake --build ./build --config Release --target ALL_BUILD
.\build\Release\model_outlier_removal.exe
结果
提取前
提取后
参考
https://mathworld.wolfram.com/SpherePointPicking.html
http://sobereva.com/311