1 能观性分析大体理解
什么是能观性分析?
能观性分析通过计算可观性矩阵,分析它的零空间的秩,来分析系统哪些状态维度可观/不可观。可观性矩阵对应系统可观测的维度,零空间对应系统不可观的维度。
为什么要做能观性分析?
举个例子:真实VIO系统不能观的维度是4(位置和yaw角),而实际MSCKF不能观的维度变成了3,绕重力轴的旋转(yaw角)被错误地能观了,从而产生了不一致性(Inconsistency),系统误认为yaw角具有更多的信息从而将yaw对应的协方差设得比较小(Under Estimate),最终导致VIO估计精度的下降。能观性分析就是为了能让MSCKF系统不可观的维度与真实系统一致,从而提高VIO精度。
2 可观性定义
如果没有两个点x0, x1,∈M是不可区分的,或者对于所有可能的控制输入都共享相同的输入-输出映射,那么从全局意义上说,一个系统是可观察的。
直观地,这个定义表达了这样一个事实,即状态空间中的一个点与它的相邻点是可以瞬间区分的。总而言之,“如果状态不同,测量值也不同。”
SLAM系统不是一个完全可观的系统,它是一个局部弱可观的系统,对于这个局部弱可观的系统,系统状态可以从测量的输出和已知的控制输入估计出来。
现在,考虑一个系统S,设O为S的可观性矩阵,其行由h(x)的李代数导数的梯度构成。当O在x0处列秩满时,系统S在x0处是局部弱可观的;我们说S在x0处满足可观秩条件(Hermann &Krener 1977))。如果O对所有x, M具有全列秩,则S一般满足可观秩条件,且是局部弱可观的(Isidori 1995)。关于可观性矩阵后面用一个简单的例子来看。

以上参考文献:Visual-Inertial Sensor Fusion: Localization,Mapping and Sensor-to-Sensor Self-Calibration。
后面知道:可观性是系统固有属性,只和状态量观测量的定义有关,不受优化滤波等估计算法的影响,不受相机激光雷达等传感器类型的影响,当系统模型确定时,系统状态量的可观测性也就随之确定,无法变更。
对于 SLAM 系统而言(如单目 VO),当我们改变状态量时,测量不变意味着损失函数不会改变,更意味着求解最小二乘时对应的信息矩阵 Λ 存在着零空间。也就是局部是弱可观的。
①单目 SLAM 系统 7 自由度不可观:6 自由度姿态 + 尺度。
②单目 + IMU 系统是 4 自由度不可观:yaw 角 + 3 自由度位置不可观。
roll 和 pitch 由于重力的存在而可观,尺度因子由于加速度计的存在而
可观。
3 可观性矩阵
考虑最简单的情况,对于线性定常离散系统来说,有状态方程和观测方程:

其中, u ( t ) 是输入量, Y ( t ) 是输出量(观测量)。 X ( t ) 是系统状态量,即待估计的未知量。
定义经过 k 时刻的状态转移矩阵,Φ ( k ) = F k \Phi(k) =F^k Φ(k)=Fk , 即 X ( t + k ) = Φ ( k ) X ( t ) X(t+k)=\Phi(k)X(t) X(t+k)=Φ(k)X(t)。
若 t 0 t_0 t0 时刻状态 X ( t 0 ) = X 0 X(t_0)=X_0 X(t0)=X0,那么就能够得到一系列的状态值和观测值:

将状态量和输入量分开,可得:
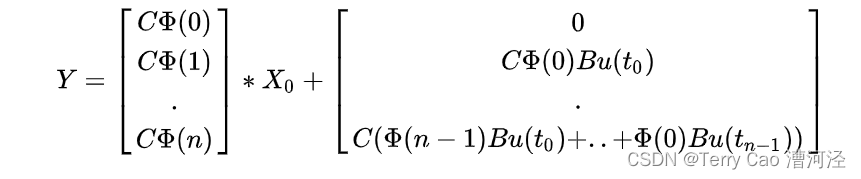
可见,该问题为 A x = b Ax=b Ax=b 的最小二乘问题。
可观性矩阵为:
当 Rank(M) =n时, X0各方向均有约束,全状态可观。当 R a n k ( M ) < n 时,则 X0存在不受约束的方向,这些方向构成了可观性矩阵M的零空间。从上面可以也看出,系统的可观性与输入量无关。
从这里可以看出,在SLAM系统优化问题中的可观性矩阵其实就是信息矩阵 H(Λ),也可以进一步知道信息矩阵 H(Λ )不满秩。
https://blog.csdn.net/Walking_roll/article/details/120612989