在这里记录运行move_base功能包的时候,遇到一些问题,进行记录。
使用下列launch文件来调用move_base功能包。
<?xml version="1.0"?>
<launch>
<arg name="use_rviz" default="false" />
<!-- for amcl -->
<arg name="init_x" default="0.0" />
<arg name="init_y" default="0.0" />
<arg name="init_a" default="0.0" />
<arg name="base" default="$(optenv TIANRACER_BASE compact)" />
<!-- for Map server -->
<arg name="map" default="$(find f1tenth_simulator)/maps/torino.yaml"/>
<!-- Map server -->
<node pkg="map_server" name="map_server" type="map_server" args="$(arg map)"/>
<!-- Localization -->
<!-- AMCL -->
<include file="$(find f1tenth_navigation)/launch/amcl.launch.xml">
<arg name="init_x" value="$(arg init_x)"/>
<arg name="init_y" value="$(arg init_y)"/>
<arg name="init_a" value="$(arg init_a)"/>
</include>
<!-- Navigation -->
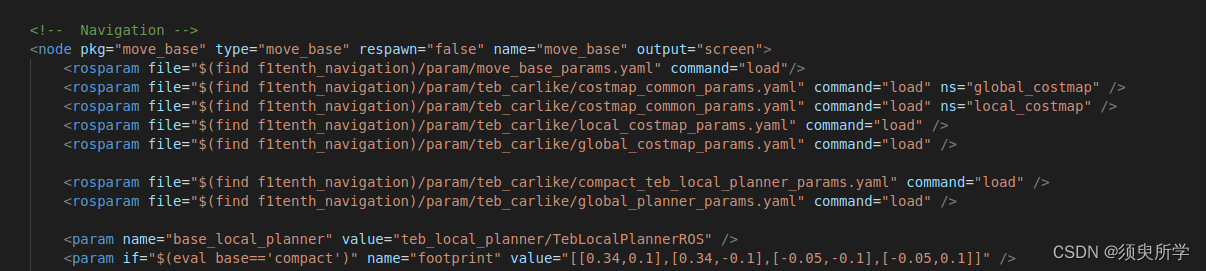
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find f1tenth_navigation)/param/move_base_params.yaml" command="load"/>
<rosparam file="$(find f1tenth_navigation)/param/teb_carlike/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find f1tenth_navigation)/param/teb_carlike/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find f1tenth_navigation)/param/teb_carlike/local_costmap_params.yaml" command="load" />
<rosparam file="$(find f1tenth_navigation)/param/teb_carlike/global_costmap_params.yaml" command="load" />
<rosparam file="$(find f1tenth_navigation)/param/teb_carlike/compact_teb_local_planner_params.yaml" command="load" />
<rosparam file="$(find f1tenth_navigation)/param/teb_carlike/global_planner_params.yaml" command="load" />
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
<param if="$(eval base=='compact')" name="footprint" value="[[0.34,0.1],[0.34,-0.1],[-0.05,-0.1],[-0.05,0.1]]" />
<param if="$(eval base=='standard')" name="footprint" value="[[0.42,0.14],[0.42,-0.14],[-0.12,-0.14],[-0.12,0.14]]" />
<param if="$(eval base=='fullsize')" name="footprint" value="[[0.8,0.27],[0.8,-0.27],[-0.2,-0.27],[-0.2,0.27]]" />
<param name="clearing_rotation_allowed" value="false" /> Our carlike robot is not able to rotate in place
</node>
<!-- cmd_vel to ackermann_cmd -->
<node pkg="f1tenth_navigation" type="cmd_vel_to_ackermann_drive.py" name="vel_to_ackermann" >
<param name="twist_cmd_topic" value="/cmd_vel" />
<param name="ackermann_cmd_topic" value="/drive" />
<param if="$(eval base=='compact')" name="wheelbase" value="0.255" />
<param if="$(eval base=='standard')" name="wheelbase" value="0.33" />
<param if="$(eval base=='fullsize')" name="wheelbase" value="0.6" />
</node>
<!-- Visualisation -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find f1tenth_navigation)/teb_navigation.rviz" if="$(arg use_rviz)" />
</launch>
问题1
问题:
Couldn’t transform from base_laser_link to base_footprint, even though the message notifier is in use
解决方法:
将 amcl_params.yaml 中 base_frame_id 和车体保持一致 base_link
问题2
问题:
Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: source_frame base_footprint does not exist… canTransform returned after 0.100814 timeout was 0.1.
原因:坐标系不统一
解决方法:
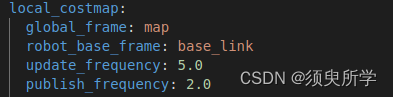
- 找到参数文件:所调用的全局和局部地图的参数文件为
global_costmap_params.yaml和local_costmap_params.yaml。
- 将两个文件中的坐标系
robot_base_frame修改为base_link。
- 若调用
amcl功能包,则amcl配置文件中的base_frame_id也改为base_link。

问题3
问题:
[ ERROR] [1669281693.716503087, 871.669000000]: Extrapolation Error: Lookup would require extrapolation -0.044000000s into the future. Requested time 871.665000000 but the latest data is at time 871.621000000, when looking up transform from frame [odom] to frame [map]
[ [ERROR] [1669281693.716542307, 871.669000000]: Global Frame: odom Plan Frame size 156: map
原因:
-
两个控制器之间的时间不同步。 但是我是在仿真上做的,不存在这种情况。
-
修改代价地图参数。
解决方法:
修改地图更新频率。将local_costmap_params.yanl和global_costmap_params.yaml文件中的参数update_frequency修改为5.0。
问题4
问题:
[ERROR] [1678257648.538376817]: Extrapolation Error: Lookup would require extrapolation into the future. Requested time 1678257648.500453419 but the latest data is at time 1678257648.498552861, when looking up transform from frame [odom] to frame [map]
[ERROR] [1678257648.538445254]: Global Frame: odom Plan Frame size 517: map
[ WARN] [1678257648.538480014]: Could not transform the global plan to the frame of the controller

解决方法:
查找资料后,
有人说是move_base功能包装错了版本,重新安装就可以解决。但是我装的版本没问题。
有人说是 /map 中有空地图传入,注释掉传入空地图的发布节点。但是我只有一处 map_server,并且地图没有重复。
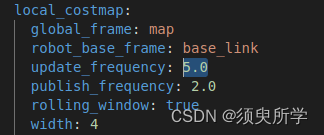
最后看到有人说,原因是局部代价地图里程计坐标系错误local_costmap_params.yaml,将第二行global_frame: odom 改成 global_frame: map,我改完后可以成功运行了。
问题5
问题:
The origin for the sensor at (0.28, 0.00, 0.00) is out of map bounds. So, the costmap cannot raytrace for it.
参考:
https://answers.ros.org/question/9845/move_base-warning-sensor-out-of-bounds/
解决方法:
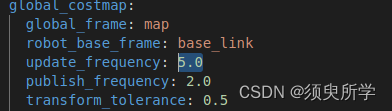
将 global_costmap_params.yaml 中的参数 rolling_window 改为 true 。
或者在 global_costmap_params.yaml 中添加参数 static_map: true,也可以正常运行。
此处与问题6相矛盾,后发现是地图格式的问题。使用图片导入地图时,图片格式为.pgm,不能为.png。将png格式转换为pgm后,还是会报相同的错误,原因是pgm格式有标准的形式,转换后的格式不标准,所以会报错。解决方法:pgm格式的图片可以使用slam方法规划后,使用命令保存获得,也可以使用画图工具手动绘制。
地图格式正确后,将 global_costmap_params.yaml 中的参数 rolling_window 改为 false 。
正确的pgm格式
错误的pgm格式
问题6
问题 :
在设置路径点后,无法规划路径,且报错:
Clearing both costmaps to unstuck robot (1.84m).
Aborting because a valid plan could not be found. Even after executing all recovery behaviors

若进行以下操作:
- 在距离当前车辆较近位置设备目标点,无报错,顺利到达。
- 较远位置设置目标点,报错(上图),无法到达。
这篇文章分析有原因和解决方法,问题在于当机器人有旋转的动作时,所有的可选轨迹就会变很短,从而导致机器人的速度变得很小。如果提高了机器人的速度上限,可以在某种程度上增加机器人有旋转动作时的移动速度。我在提高了参数 acc_lim_x,acc_lim_theta后还是没有解决上述问题。
最后自己摸索,将 global_costmap_params.yaml 中的参数 rolling_window 改为 false ,后没有报错,且目标点距离较远时也可以规划路径。
但是此处与问题5相矛盾。