相关文章:
简介
参考线在apollo中起到了关键的承上启下的作用。
它收集了上游路由,高精地图,定位等模块的信息,整合后生成一段基于车道中心线的平滑的路径,输送给下游决策规划控制模块使用。
在阅读了几遍源码和网上的介绍后,我想要整理出一版参考线生成的简化版本。
主要参考的还是下面这个链接。
我补充说明了一些上面的链接中部分未解释到的细节。
为了让思路更清晰,本文章未对解释如何实现某功能,而更注重于该模块实现了什么,以及每个模块的输入和输出,对实现细节感兴趣的同学可以去自行查阅源码。
参考线生成流程
从Apollo中Planning模块的入口说起,调用流程大致为:

其中,箭头代表函数间的调用关系。例如,Planning模块入口为PlanningComponent::Init(...),它调用了OnLanePlanning::Init(...),而后调用ReferenceLineProvider中的函数开启新的线程来生成ReferenceLine,其刷新的频率为20Hz。
本文章主要为了说明生成参考线的这一过程,即ReferenceLineProvider::CreateReferenceLine(...)函数的说明。该函数根据调用顺序可以分为以下三部分,也是本文章的大体结构。

第一部分:路由响应的处理
- RoutingResponse数据结构
首先,我们需要了解路由输出的结果的数据结构,在apollo中,它们被定义在modules/routing/proto/routing.proto文件中,我挑选了比较重要的数据展示在下面。
其中我们最为关注的为RoutingResponse,它为参考线接收到的数据。
// 为路由模块的输入,车辆在全局地图中必须经过的点
// PointENU为东北天坐标系,apollo中被简化为二维横轴墨卡托坐标系
message LaneWaypoint {
optional string id = 1;
optional double s = 2;
optional apollo.common.PointENU pose = 3;
// When the developer selects a point on the dreamview route editing
// the direction can be specified by dragging the mouse
// dreamview calculates the heading based on this to support construct lane way point with heading
optional double heading = 4;
}
// 其中id存储的为全局唯一的车道id,即定义在map_lane.proto中的Lane的id
message LaneSegment {
optional string id = 1;
optional double start_s = 2;
optional double end_s = 3;
}
message RoutingRequest {
optional apollo.common.Header header = 1;
// at least two points. The first is start point, the end is final point.
// The routing must go through each point in waypoint.
repeated LaneWaypoint waypoint = 2;
repeated LaneSegment blacklisted_lane = 3;
repeated string blacklisted_road = 4;
optional bool broadcast = 5 [default = true];
optional apollo.hdmap.ParkingSpace parking_space = 6 [deprecated = true];
optional ParkingInfo parking_info = 7;
optional DeadEndInfo dead_end_info = 8;
}
enum ChangeLaneType {
FORWARD = 0;
LEFT = 1;
RIGHT = 2;
};
message Passage {
repeated LaneSegment segment = 1;
optional bool can_exit = 2;
optional ChangeLaneType change_lane_type = 3 [default = FORWARD];
}
message RoadSegment {
optional string id = 1;
repeated Passage passage = 2;
}
message RoutingResponse {
optional apollo.common.Header header = 1;
repeated RoadSegment road = 2;
optional Measurement measurement = 3;
optional RoutingRequest routing_request = 4;
// the map version which is used to build road graph
optional bytes map_version = 5;
optional apollo.common.StatusPb status = 6;
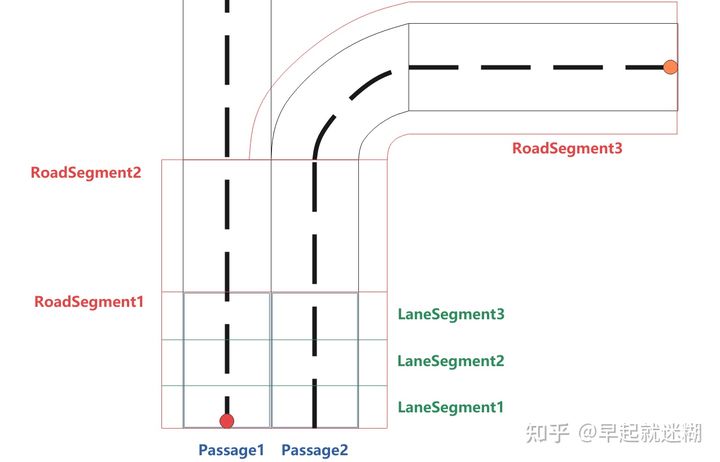
}而其中最重要的为RoadSegment,路由模块将道路结构分解为多个RoadSegment,每个RoadSegment又包括多个通道:Passage,每个Passage又由多个LaneSegment组成。
如图所示,为双车道中的一个例子。红色点为Routing起点,橙色为终点。
则RoutingResponse中给我们的结果就是RoadSegment1, 2, 3。
RoadSegment1中包括两个Passage(即每个车道为一个通道),每个Passage又包括三个LaneSegment。
这样做有什么好处呢?
当我们为RoadSegment,Passage,LaneSegment编号时,就可以将Routing模块输出的地图道路信息中每个车道中的每个LaneSegment快速的索引出来。如图中(1, 1, 1)代表左下角红圈所在的LaneSegment。
另外需要注意的是Passage中的两个属性:
can_exit : 代表能否从当前通道去下一个通道。用于判断将来是否需要变道。例如Passage1中can_exit为false, Passage2中为true。
change_lane_type : 代表当前通道是直行(FORWARD),左转(LEFT)还是右转(RIGHT)。 图中Passage1为RIGHT, 因为需要右转才能到终点。Passage2为FORWARD。
RoadSegment,Passage,LaneSegment图解:

- 更新路由信息
主要函数为:
PncMap::UpdateRoutingResponse(const routing::RoutingResponse &routing)
可以看到,其输入为RoutingResponse成员,即routing模块的输出。
其主要功能为初始化下面加粗的三个pnc_map类成员:
- 在得到RoutingResponse后,该函数为所有的routing::LaneSegment构建了索引列表route_indices_ ,其类型为vector<RouteIndex>。并将索引相对应的LaneSegment类型转换为hdmap::LaneSegment存进RouteIndex。
struct RouteIndex {
//此处类型为hdmap::LaneSegment
LaneSegment segment;
//{road_index, passage_index, lane_index}
std::array<int, 3> index;
};2. 将LaneSegment中的车道的lane_id取出,存入all_lane_ids_,和route_indices_ 中的LaneSegment一一对应。
3. 查询起始点和终点在哪段LaneSegment中,存入routing_waypoint_index_。
第二部分:根据车辆当前位置生成短期通道
这一部分主要涉及到的函数为ReferenceLineProvider::CreateRouteSegments(...)调用的PncMap::GetRouteSegments(...)
输入为车辆当前位置,前向查找距离,后向查找距离,
输出为std::list<RouteSegments>,list中每一个RouteSegments代表一条参考线经过的RouteSegments。在apollo中,该list的元素被限制为了最多为两个,原因后面会说明。
PncMap::GetRouteSegments(const VehicleState &vehicle_state,
const double backward_length,
const double forward_length,
std::list<RouteSegments> *const route_segments)RouteSegments类型为公有继承的std::vector<LaneSegment>,我们来看apollo中对它的说明,简单来说,该类从Passage扩展而来,保留了Passage的某些特征。该类包含了生成hdmap::Path类的原始数据,而Path类又可以用于初始化参考线。
也就是说我们在这一步主要是生成连接起来的可通行的Passage,从而为生成参考线做准备。
/**
* @brief class RouteSegments
*
* This class is a representation of the Passage type in routing.proto.
* It is extended from a passage region, but keeps some properties of the
* passage, such as the last end LaneWaypoint of the original passage region
* (route_end_waypoint), whether the passage can lead to another passage in
* routing (can_exit_).
* This class contains the original data that can be used to generate
* hdmap::Path.
**/
class RouteSegments : public std::vector<LaneSegment>该函数大致分为三步:
- 更新pnc map中无人车状态
主要函数为PncMap::UpdateVehicleState(const VehicleState &vehicle_state) ,输入为VehicleState类对象,该类被定义在modules/common/vehicle_state/proto/vehicle_state.proto文件中,主要存储自车当前的位置信息,状态信息等。
message VehicleState {
optional double x = 1 [default = 0.0];
optional double y = 2 [default = 0.0];
optional double z = 3 [default = 0.0];
optional double timestamp = 4 [default = 0.0];
optional double roll = 5 [default = 0.0];
optional double pitch = 6 [default = 0.0];
optional double yaw = 7 [default = 0.0];
optional double heading = 8 [default = 0.0];
optional double kappa = 9 [default = 0.0];
optional double linear_velocity = 10 [default = 0.0];
optional double angular_velocity = 11 [default = 0.0];
optional double linear_acceleration = 12 [default = 0.0];
optional apollo.canbus.Chassis.GearPosition gear = 13;
optional apollo.canbus.Chassis.DrivingMode driving_mode = 14;
optional apollo.localization.Pose pose = 15;
optional double steering_percentage = 16;
}VehicleState在这里主要用到了其全局坐标x,y,以及自车航向角heading。
这一部分就是根据自车的全局坐标系以及航向角,找到自车在哪一个LaneSegment中,或者说投影后距离那个LaneSegment最近,输出自车所在LaneSegment对应的index,并计算离自车最近的下一个必经点LaneWaypoint所在的LaneSegment对应的index。
- 计算临近通道
主要函数为GetNeighborPassages。
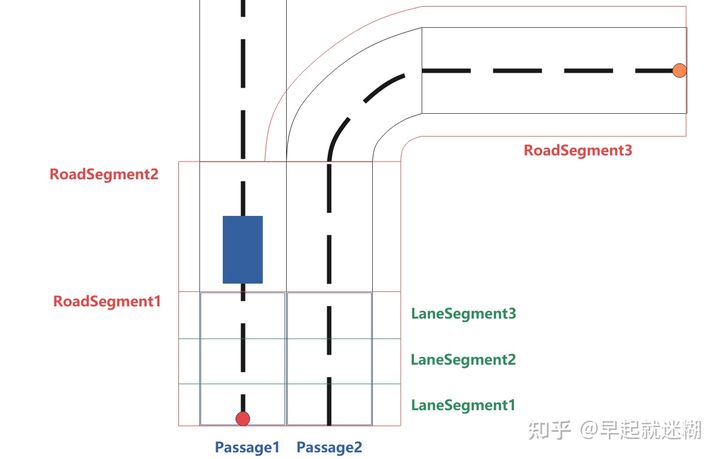
输入为自车所在的RoadSegment和通道Passage的id,如果当前Passage的change_lane_type为RIGHT,则输出为当前RoadSegment中自车右手边全部通道Passage的id,包括自车所在通道。若为LEFT,则输出左边。
举例来说,蓝色车为自车,则该函数输出Passage1, 2。
若不为双车道,例如右边有Passage3,Passage4,则输出为Passage1,2,3,4。
- 生成list<RouteSegments>
遍历第二步中输出的全部通道,
若为自车所在通道,根据前向查找距离,后向查找距离生成一条短期通道RouteSegments,存入list<RouteSegments>。
若不为自车所在通道,调用CanDriveFrom查看能否从自车位置驶入该通道,若能则将自车投影到该通道并根据前向查找距离,后向查找距离生成一条短期通道RouteSegments,存入list<RouteSegments>。
CanDriveFrom函数判定依据为:
自车能投影到该Passage上,自车距离该Passage横向距离不能超过一条车道的宽度,自车heading应该和该Passage所在车道方向一致等。
上面标黑的条件导致了最终生成的list最多只有两个RouteSegments!
因此,对于上例来说,最终生成的list<RouteSegments>可能长这样,图中灰色区域:
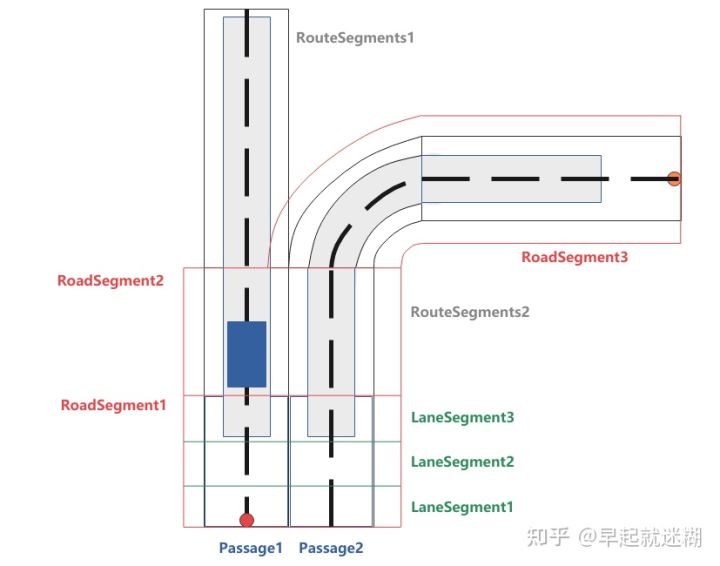
至于为什么RouteSegments1会延长超出当前RoadSegment2, 感兴趣的同学可以去查看ExtendSegments中的算法。
至此,ReferenceLineProvider::CreateRouteSegments函数运行完毕。
第三部分:初始化Path
这一部分涉及到ReferenceLineProvider::SmoothRouteSegment函数,该函数输入为RouteSegments(上图中灰色区域),输出为ReferenceLine。
- 首先,会根据输入的RouteSegments初始化一条Path。
Path的构造函数重载了很多版本,而当输入只有vector<LaneSegment>(RouteSegments为其子类)时,构造函数会调用MapPathPoint::GetPointsFromLane(...)来从LaneSegment中取出车道中心线的构成点来初始化Path。
Path::Path(const std::vector<LaneSegment>& segments)
: lane_segments_(segments) {
for (const auto& segment : lane_segments_) {
const auto points = MapPathPoint::GetPointsFromLane(
segment.lane, segment.start_s, segment.end_s);
path_points_.insert(path_points_.end(), points.begin(), points.end());
}
MapPathPoint::RemoveDuplicates(&path_points_);
CHECK_GE(path_points_.size(), 2U);
Init();
}MapPathPoint::GetPointsFromLane(...)的输入为当前LaneSegment所在的车道,起点s和终点s。这里segment.lane为指向LaneInfo类的指针。
apollo中车道的数据结构主要写在modules/map/proto/map_lane.proto中,然后又用LaneInfo对proto数据做了一层封装。感兴趣的同学可以去查阅。
根据输入,该函数取出车道数据中的中线构成点的世界坐标和Frenet坐标,然后根据这些信息初始化MapPathPoint点,也就是构成Path的基本元素,输出vector<MapPathPoint>。
- 调用Init()为Path中的点赋予属性
void Path::Init() {
InitPoints();
InitLaneSegments();
InitPointIndex();
InitWidth();
InitOverlaps();
}初始化函数为Path点初始化一些Path类易维护的属性以及行车过程中所需要的必要信息。
例如InitWidth为初始化该路径点距离两边的车道边缘距离,距离两边道路边缘距离。
InitOverlaps为初始化该路径经过的一些和交通元素等的一些重叠,细节部分可以重开一帖再写。
- 平滑参考线
在得到最终Path后,用它来构造一条粗糙的ReferenceLine,然后通过函数ReferenceLineProvider::SmoothReferenceLine调用smoother平滑该参考线得到最终的参考线。