Unity 算法 之 点集中计算绘制 凸包 的简单整理
目录
一、简单介绍
算法(Algorithm)是指解题方案的准确而完整的描述,是一系列解决问题的清晰指令,算法代表着用系统的方法描述解决问题的策略机制。也就是说,能够对一定规范的输入,在有限时间内获得所要求的输出。如果一个算法有缺陷,或不适合于某个问题,执行这个算法将不会解决这个问题。不同的算法可能用不同的时间、空间或效率来完成同样的任务。一个算法的优劣可以用空间复杂度与时间复杂度来衡量。
凸包(Convex Hull)是一个计算几何(图形学)中的概念。
在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集S被称为X的凸包。
X的凸包可以用X内所有点(X1,...Xn)的线性组合来构造.
在二维欧几里得空间中,凸包可想象为一条刚好包著所有点的橡皮圈。
用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边型,它能包含点集中所有的点。
凸包:在一个实数向量空间V中,对于给定集合X,所有包含X的凸集的交集被称为X的凸包。
给定一组离散的点,求得包围整个离散点的边的集合。
例如,在墙上随机定了N个钉子,然后用一个足够大的橡皮筋包围这些钉子,那么松开橡皮筋之后,橡皮筋的范围就是凸包。


那么凸包的算法,就是输入一组离散点,返回能够组成凸包的点,将这些点连接起来就是凸包了。
常用的凸包算法是Graham扫描法,和Jarvis步进法
二、Graham扫描法
时间复杂度:O(n㏒n)
思路:Graham扫描的思想是先找到凸包上的一个点,然后从那个点开始按逆时针方向逐个找凸包上的点,实际上就是进行极角排序,然后对其查询使用。

第一种说明:
1、把所有点放在二维坐标系中,则纵坐标最小的点一定是凸包上的点,如图中的P0。
2、把所有点的坐标平移一下,使 P0 作为原点,如上图。
3、计算各个点相对于 P0 的幅角 α ,按从小到大的顺序对各个点排序。当 α 相同时,距离 P0 比较近的排在前面。例如上图得到的结果为 P1,P2,P3,P4,P5,P6,P7,P8。我们由几何知识可以知道,结果中第一个点 P1 和最后一个点 P8 一定是凸包上的点。
(以上是准备步骤,以下开始求凸包)
以上,我们已经知道了凸包上的第一个点 P0 和第二个点 P1,我们把它们放在栈里面。现在从步骤3求得的那个结果里,把 P1 后面的那个点拿出来做当前点,即 P2 。接下来开始找第三个点:
4、连接P0和栈顶的那个点,得到直线 L 。看当前点是在直线 L 的右边还是左边。如果在直线的右边就执行步骤5;如果在直线上,或者在直线的左边就执行步骤6。
5、如果在右边,则栈顶的那个元素不是凸包上的点,把栈顶元素出栈。执行步骤4。
6、当前点是凸包上的点,把它压入栈,执行步骤7。
7、检查当前的点 P2 是不是步骤3那个结果的最后一个元素。是最后一个元素的话就结束。如果不是的话就把 P2 后面那个点做当前点,返回步骤4。
第二种说明:
1、从离散点集合S中获取一个y轴最小,x轴最小的点 P0。(如果最小y轴有多个点,就取x轴最小的点)
2、计算S中其他的点到P0点的极角,并按照从小到大的顺序进行排序的到集合S1(极角相同,取距离最段的排在前),通过排序后可以确定PO点和排序后集合S1 中的第一个点P1点是凸包点,加入凸包列表中。
3、从S1中取得下一个点(P2),计算P2点位于线段(P0,01)的左边还是右边。
4、如果是左边,将P2点加入凸包点队列,如果右边,移除上一次加入的点(P1),重新计算P1点与集合中线段的位置关系(这里移除P1后,列表里只有一个,那就直接加入)
5、重复3到4步骤,知道S1中没有点为止。
三、代码(第二种说明)
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
public class GrahamScan : MonoBehaviour {
//离散的点
public Transform[] Points;
//组成边的顶点集合
public List<Transform> ePoint = new List<Transform>();
private bool IsFinsh = false;
void Start()
{
Aritmetic();
}
//算法
void Aritmetic()
{
Transform bp = BasePoint();
bp.name = "P0";
ePoint.Add(bp);
Transform[] polarSort = PolarSort(bp);
for (int i = 0; i < polarSort.Length; i++)
{
if (polarSort[i] == bp) continue;
polarSort[i].name = "P" + (i + 1);
}
//通过排序,而可以得知 第一个点肯定在凸边上
ePoint.Add(polarSort[0]);
StartCoroutine(Ia(polarSort));
}
IEnumerator Ia(Transform[] polarSort)
{
for (int i = 1; i < polarSort.Length; i++)
{
yield return new WaitForSeconds(1);
ePoint.Add(polarSort[i]);
float d = PointDir(ePoint[ePoint.Count-1].position, ePoint[ePoint.Count - 2].position, ePoint[ePoint.Count - 3].position);
if (d <= 0)
continue;
while (true)
{
yield return new WaitForSeconds(1);
ePoint.RemoveAt(ePoint.Count-2);
d = PointDir(ePoint[ePoint.Count - 1].position, ePoint[ePoint.Count - 2].position, ePoint[ePoint.Count - 3].position);
if (d < 0)
break;
}
}
IsFinsh = true;
}
void OnDrawGizmos()
{
Gizmos.color = Color.red;
if (!IsFinsh)
{
for (int i = 0; i < ePoint.Count - 1; i++)
Gizmos.DrawLine(ePoint[i].position, ePoint[i + 1].position);
return;
}
for (int i = 0; i < ePoint.Count; i++)
{
if (i == ePoint.Count - 1)
{
Gizmos.DrawLine(ePoint[i].position,ePoint[0].position);
continue;
}
Gizmos.DrawLine(ePoint[i].position,ePoint[i+1].position);
}
}
/// <summary>
/// 获取基点P0
/// </summary>
/// <returns></returns>
Transform BasePoint()
{
//取y值最小 如果多个y值相等,去x最小(这里y 我们取z)
Transform minPoint = Points[0];
for (int i = 1; i < Points.Length; i++)
{
if (Points[i].position.z < minPoint.position.z)
minPoint = Points[i];
else if (Points[i].position.z < minPoint.position.z)
minPoint = Points[i].position.x < minPoint.position.x ? Points[i] : minPoint;
}
return minPoint;
}
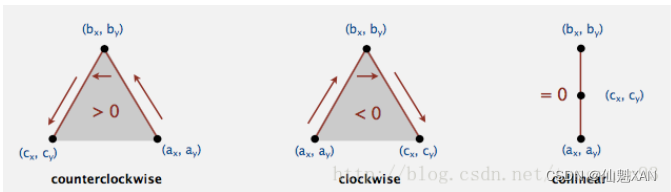
/// <summary>
/// 获取点的方向 =0 在线上 <0在左侧 >0在右侧
/// </summary>
/// <param name="p"></param>
/// <param name="p1"></param>
/// <param name="p2"></param>
/// <returns></returns>
float PointDir(Vector3 p, Vector3 p1, Vector3 p2)
{
Vector3 v1 = p1 - p;
Vector3 v2 = p2 - p1;
float f = v1.x * v2.z - v2.x * v1.z;
return f;
}
/// <summary>
/// 极角排序
/// </summary>
/// <param name="bp"></param>
/// <returns></returns>
Transform[] PolarSort(Transform bp)
{
List<Transform> p = new List<Transform>();
for (int i = 0; i < Points.Length; i++)
{
//如果是自己,则跳过
if (Points[i] == bp) continue;
Vector3 v = Vector3.zero;
float e = GetProlar(Points[i], bp,out v);
int index = -1;
for (int j = 0; j < p.Count; j++)
{
Vector3 v1 = Vector3.zero;
float e1 = GetProlar(p[j],bp,out v1);
if (e1 > e)
{
index = j;
break;
}
if (e1 == e && v.magnitude < v1.magnitude)
{
index = j;
break;
}
}
if (index == -1)
{
p.Add(Points[i]);
continue;
}
p.Insert(index,Points[i]);
}
return p.ToArray();
}
/// <summary>
/// 获取极角
/// </summary>
/// <param name="pos1"></param>
/// <param name="pos2"></param>
/// <returns></returns>
float GetProlar(Transform pos1, Transform pos2,out Vector3 v)
{
v = pos1.position - pos2.position;
return Mathf.Atan2(v.z,v.x);
}
}