目录
专用名词
CONFIGURATION REGISTER 配置寄存器 scrathpad memory 缓冲存储器、高速暂存存储器、暂时存储器
一. 温度传感器介绍
DS18B20 默认温度数据是 12bit(补码),最高位为符号位(1:负温,0:正温),低 4bit为小数位,低 11bit 转化为十进制后乘以 0.0625 即为实际温度值。
DS18B20 是一款常用的数字式温度传感器,输出数字信号来表示温度值,具有体积小,精度高等特点。DS18B20 的温度测量范围为-55℃~+125℃;精度为±0.5℃;输出温度值位宽可编程(9—12bit);单总线接口允许多个设备挂在同一总线,可以用于部署分布式温度采集系统;可配置的温度转换时间,最大温度转换时间为 750ms。
DS18B20的传输序列:
1. 初始化 2. ROM指令 3. 功能指令 当需要读取 DS18B20 的温度转换结果时,ROM 指令发送完后,需要回到步骤 1,再次发送初始化序列,然后发送功能指令。
1.2 DS18B20结构

高速缓存器的结构框图如下:

高速缓存器一共有九个八位寄存器,字节0和字节1是存储温度的,从低字节LSB到高字节MSB,这两个字节不可以更改,只能读出。认配置温度数据为12位,其中最高位为符号位,即温度值共11位,最低四位为小数位。FPGA在读取温度数据时,一次会读2字节共16位,读完后将低11位的二进制数转化为十进制数后再乘以0.0625得到所测的实际温度值。另外还需要判断温度的正负,前5个数字为符号位,这5位同时变化,我们只需要判断其中任何一位就可以了。前5位为1时,读取的温度为负值,则测到的数值需要取反加1再乘以0.0625才可得到实际温度值。前5位为0时,读取的温度为正值,只要将测得的数值乘以0.0625即可得到实际温值。高温出发值 TH 和低温触发值 TL 都是要满足一定条件才会响应,需要自己设置。

由上图可知DS18B20的高速缓存器共有9个8位寄存器,其中温度数据低位(LSB)对应字节 地址0,温度数据高位(MSB)对应字节地址1,以此类推,配置寄存器的字节地址为4。温度数据存放的格式如下图:

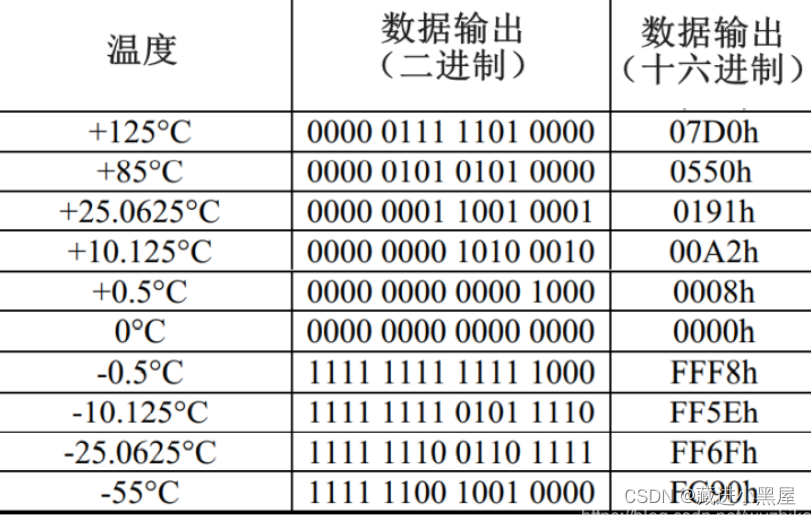
DS18B20在出厂时默认配置温度数据为12位,其中最高位为符号位,即温度值共11位,最低四位为小数位。FPGA在读取温度数据时,一次会读2字节共16位,读完后将低11位的二进制 数转化为十进制数后再乘以0.0625得到所测的实际温度值。
另外还需要判断温度的正负,前5 个数字为符号位,这5位同时变化,我们只需要判断其中任何一位就可以了。前5位为1时,读 取的温度为负值,则测到的数值需要取反加1再乘以0.0625才可得到实际温度值。前5位为0时, 读取的温度为正值,只要将测得的数值乘以0.0625即可得到实际温度值。
高速缓存器中第四个字节即为配置寄存器,用户通过改变 R1 和 R0 的值来配置 DS18B20 的分辨率,上电默认为 R1=1 以及 R0=1(12 位分辨率)。需要注意的是转换时间与分辨率时间是有关系的。另外寄存器中最高位和低 5 位作 为内部使用而保留使用,不可被写入。转换时间与位数关系如下表所示:

二. 单总线协议
2.1 单总线传输原理
由于DS18B20温度传感器采用单总线的方式进行通信,因此我们先简略的介绍一下单总线
通信的原理。
单总线传输的定义:顾名思义,即主机和从机用一根总线进行通信,是一种半双工的通信
方式,单线=时钟线+数据线+控制线(+电源线)。理想状况下一条总线上的从器件数量几乎不
受数量限制。
单总线优劣势:
单总线技术具有线路简单,硬件开销少,成本低廉,便于总线扩展和维护等优点。但由于只有一根总线,驱动能力一般较差,不能接过多的从器件,实际使用中,一般最多只能接8个从器件;抗干扰能力较差,一般只能在中短距离的低速传输中使用;软件设计复杂,事物往往有两面性,硬件部分的简单往往需要软件在复杂度上做出牺牲。
数据传输:
单总线通信协议为确保数据的完整性,定义了如下几种单线信号类型:复位脉冲、存在脉
冲、写0、写1、读0和读1。所有这些信号,除存在脉冲外,都是由总线控制器发出的。
单总线协议中主机和从机(DS18B20)间的任何通讯都需要以初始化序列开始
2.2 数据传输三步骤
1. 初始化序列 2. rom命令 3. 功能命令
2.3 初始化序列
即初始化序列分为三个步骤:
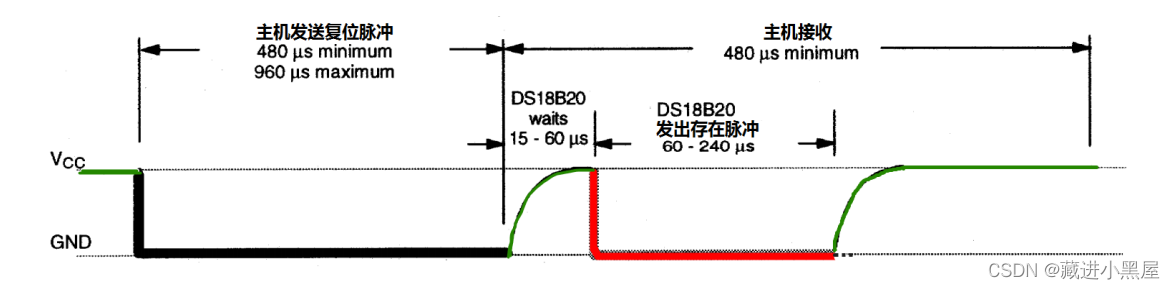
1.主机发送复位脉冲 至少480us
2.上拉电阻将总线拉高 15~60us
3.DS18B20发送存在脉冲应答主机 60~240us
初始化—复位和存在脉冲
单总线上的所有事件都必须以初始化为开始。初始化序列由总线上的主设备发出的复位脉冲以及紧跟着从设备回应的存在脉冲构成。该存在脉冲是让总线主设备知道 DS18B20 在总线上并准备好运行
与 DS18B20 所有的通信都是由初始化开始的,初始化由主设备发出的复位脉冲及 DS18B20 响应的存在脉冲组成。如下图 所示。当 DS18B20 响应复位信号的存在脉冲 后,则其向主设备表明其在该总线上,并且已经做好了执行命令的准备。 在初始化状态,总线上的主设备通过拉低 1-Wire 总线最少 480us 来表示发送复位脉 冲。发送完之后,主设备要释放总线进入接收模式。当总线释放后,上拉电阻将 1- Wire 总线拉至高电平。当 DS18B20 检测到该上升沿信号后,其等待 15us 至 60us 后将总线 拉低 60us 至 240us 来实现发送一个存在脉冲。

2.4 ROM命令
用于对 64 位的 ROM 操作;
F0H:搜索ROM
当系统上电初始化后,主设备可识别该总线上所有的从设备的 ROM 编码,这样就可以使得主设备确定总线上的从设备的类型以及数量。
33H:读 ROM
该命令允许主设备读取 DS18B20 的 64 位 ROM 编码,只有在总线上只有一个 DS18B20 时才能使用这个命令。如果总线上存在多个从设备,发送此命令,则当所有从设 备都会回应时,将会引起数据冲突。
55H:匹配 ROM
该匹配 ROM 命令之后接着发出 64 位 ROM 编码,使主设备在多点总线上定位一只特定的 DS18B20。只有和 64 位 ROM 序列完全匹配的 DS18B20 才会做出响应。总线上的其 他从设备都将等待下一个复位脉冲。此命令在总线上有单个或多个器件时都可以使用。
CCH:跳过 ROM
这条命令可以不用提供 64 位 ROM 编码就进行下一步操作,在单点总线(一个 DS18B20 传感器)情况下可以节省时间。如果总线上不止一个从设备,在跳过 ROM 命令 之后跟着发一条读命令,则所有从设备将会同时执行温度转换,总线上就会发生数据冲突。
ECH:报警搜索
该命令的操作与跳过 ROM 命令基本相同,但是不同的是只有温度高于 TH 或低于 TL (达到报警条件)的从设备才会响应。只要不掉电,警报状态将一直保持,直到温度不在警报范围内为止。
如果系统中只有一个 DS18B20,就不需要读取 ROM 与匹配 ROM 操作,可以直接发送跳过 ROM(CCH)命令,然后就可以开始测量温度。
2.5 功能ROM命令
用于主机向DS18B20 的暂存器写/读数据,发温度转换以及读取供电模式;
44H:温度转换
此命令为初始化单次温度转换,温度转换完后,转换的温度数据会寄存在高速缓存器 的 byte0(温度数据低八位)和 byte1(温度数据高八位)中,之后 DS18B20 恢复到低功耗 的闲置状态。如果总线在该命令后发出读时隙,若 DS18B20 正在进行温度转换则会响应 “0”,若完成了温度转换则响应“1”。如果是用的“寄生电源”供电模式,则在命令发 出后应立即强制拉高总线,拉高时间应大于时序要求。
4EH:写暂存寄存器
该命令使得主设备向高速缓存器写入 3 个字节的数据。第一个字节写入高速缓存器的 byte2 中(TH 寄存器),第二个字节的数据写入 byte3 中(TL 寄存器),第三个字节的数据写入 byte4 中(配置寄存器)。所有的数据都是由低位到高位的顺序写入。复位可随时中断写入。
48H:复制 RAM
该命令是将高速缓存器中的 TH(byte2)、TL(byte3)以及配置寄存器(byte4)里的 值拷贝到非易失性的存储器 EEPROM 里。如果总线控制器在这条命令之后跟着发出读时 隙,而 DS18B20 又正在忙于把暂存器拷贝到 EEPROM 存储器,DS18B20 就会输出一个 “0”,如果拷贝结束的话,DS18B20 则输出“1”。如果设备采用“寄生电源”供电模 式,则在该命令发送后,必须立即强制拉高总线至少 10ms。
BEH:读暂存寄存器
从 byte0(温度低八位)开始一直读到 byte8(CRC 校验),每个字节的数据从低位开始传送。若是不想读取这么多数据则在读取数据时随时可以通过主机发送复位脉冲来停止读取。
B8H:重调 EEPROM
该命令将温度报警触发值(TH 和 TL)及配置寄存器的数据从 EEPROM 中召回至高速 缓存器中。这个操作会在上电后自动执行一次,所以在上电期间暂存器中一直会存在有效 的数据。若在召回命令之后启动读时隙,若 DS18B20 正在进行召回 EEPROM 则会响应 “0”,若召回完成则响应“1”。
B4H:读供电方式
该命令可以读取总线上的 DS18B20 是否是由“寄生电源”供电。在读取数据时序中 “0”表示“寄生电源供”模式供电,“1”表示外部电源供电。
暂存器字节 0 和字节 1 是只读的,用于存储传感器测量的温度值
2.6 读写时序
写时隙:
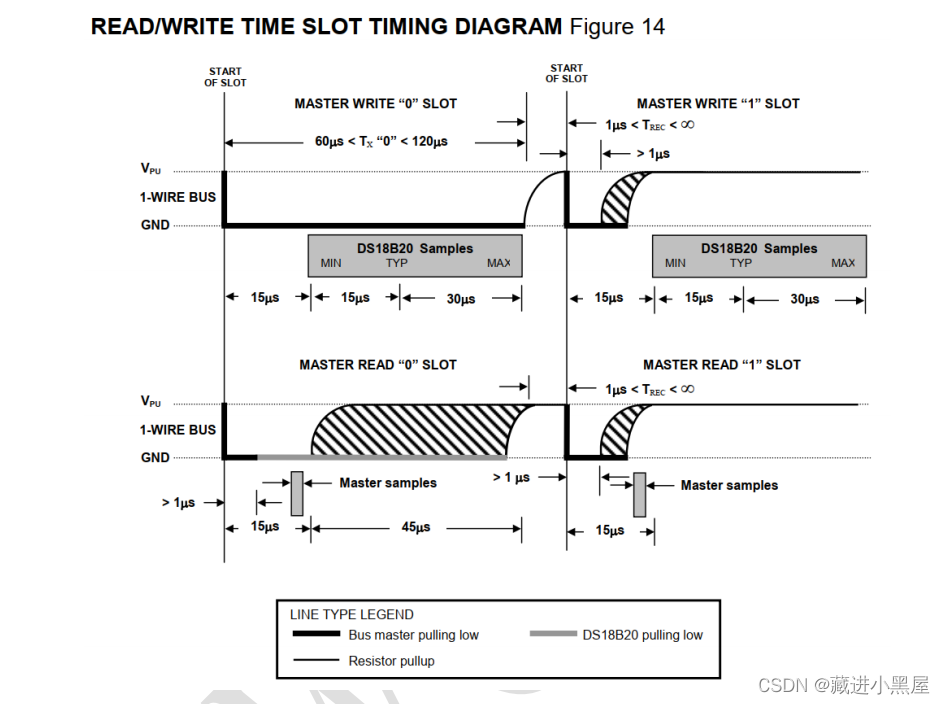
主设备通过写时隙将命令写入 DS18B20 中,写时隙有两种情况:写“1”和写“0”时 隙。主设备通过写 1 时隙来向 DS18B20 中写入逻辑 1,通过写 0 时隙来向 DS18B20 中写入 逻辑 0。当主设备将总线从高电平拉至低电平时,启动写时隙,所有的写时隙持续时间最 少为 60us,每个写时隙间的恢复时间最少为 1us。 当总线(DQ)拉低后,DS18B20 在 15us 至 60us 之间对总线进行采样,如果采的 DQ 为高电平则发生写 1,如果为低电平则发生写 0,如下图所示(图中的总线控制器即为主设备)。 如果要产生写 1 时隙,必须先将总线拉至逻辑低电平然后释放总线,允许总线在写 隙开始后 15us 内上拉至高电平。若要产生写 0 时隙,必须将总线拉至逻辑低电平并保持不 变最少 60us。
读时隙:
当我们发送完读取供电模式[B4h]或读高速缓存器[BEh]命令时,必须及时地生成读时隙,只有在读时隙 DS18B20 才能向主设备传送数据。每个读时隙最小必须有 60us 的持续 时间以及每个读时隙间至少要有 1us 的恢复时间。当主设备将总线从高电平拉至低电平超 过 1us,启动读时隙,如下图所示。当启动读时隙后,DS18B20 将会向主设备发送“0”或者“1”。DS18B20 通过将总线 拉高来发送 1,将总线拉低来发送 0 。当读时隙完成后,DQ 引脚将通过上拉电阻将总线拉高至高电平的闲置状态。从 DS18B20 中输出的数据在启动读时隙后的 15us 内有效,所以,主设备在读时隙开始后的 15us 内必须释放总线,并且对总线进行采样。
三 代码设计
3.1 状态跳转——工作流程
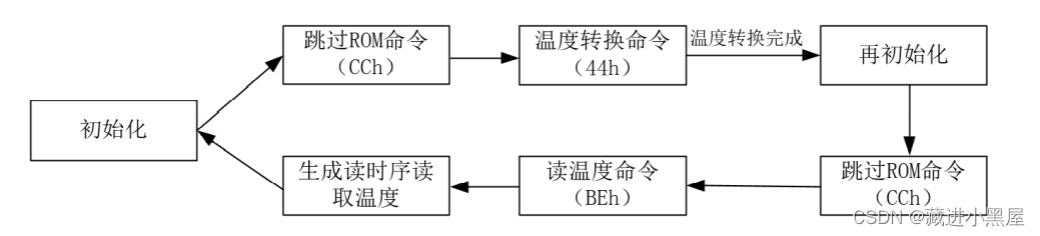
DS18B20的典型温度读取过程为:初始化➔发跳过ROM命令(CCH)➔发开始转换命令(44H)➔延时➔初始化➔发送跳过ROM命令(CCH)➔发读存储器命令(BEH)➔连续读出两个字节数据(即温度)➔结束或开始下一循环。

主状态机
就是用来表示温度传感器的工作流程的,首先是初始化
即初始化序列分为三个步骤: 1.主机发送复位脉冲 至少480us 2.上拉电阻将总线拉高即 释放总线 15~60us 3.DS18B20发送存在脉冲应答主机 60~240us
初始化完成之后,主机就可以向从机读写数据。主机向从机发送跳过ROM命令,跳过ROM命令对单总线上仅有一个从机的情况下可以节省很多时间,不用提供64位ROM编码就可以进行下一步操作。
条件:
当从机接收到应答,且计数器记到60us进行采样,slave_ack == 1'b0 方可发送rom指令 即从机接收应答到发送rom指令是,跳过ROm命令发出 M_ACK2M_ROMS
本次实验包含三个指令:
CMD_ROMS = 8'hCC,//跳过ROM指令 CMD_CONT = 8'h44,//温度转化 CMD_RTMP = 8'hBE;//读暂存器
发送完跳过ROM指令之后进入发送功能指令
包括温度转换和读取温度暂存器命令,需要我们标记区分,因此需要一个flag标志,当m_wait2m_rest阶段,flag为1,当m_rtmp2m_idle阶段,则flag为0
若m_roms2m_cont,表示转换温度命令,当跳过rom指令写入完成,即当从状态机完成数据写入并且从状态机处于S_DONE,且标志flag为0,将rom指令写入之后,进入温度转换
温度转换也需要向暂存器写入数据,即温度最开始的LSB到MSB两个字节的数据,CMD_CONT = 8'h44命令写入后,即当从状态机完成数据写入并且从状态机处于S_DONE,进入等待状态
等待状态即等待温度转换完成,需要等待750ms,之后直接进入idle状态或者主机发送复位脉冲状态,之后再次进行初始化序列,完成后发送rom指令,再进行读取温度寄存器指令
若m_roms2m_rcmd,表示读温度暂存器命令,即当从状态机完成数据写入并且从状态机处于S_DONE,当跳过rom指令写完后且flag为1,进入读温度指令。
读温度命令写需要进行写数据操作,当CMD_RTMP = 8'hBE写入之后,即当从状态机完成数据写入并且从状态机处于S_DONE,进入读取温度值,读温度值则进行读操作,读取温度完成后进入idle状态
从状态机:
主机想从机进行写数据(写操作),或从机向主机发送数据(读操作)
从机开启条件:
assign s_idle2s_low = s_state_c == S_IDLE && (m_state_c == M_ROMS || m_state_c == M_CONT || m_state_c == M_RCMD || m_state_c == M_RTMP);
即当主机处于M_ROMS|| M_CONT || M_RCMD || M_RTMP时,从机开启进入总线拉低状态,s_low
assign s_low2s_send = s_state_c == S_LOW && (m_state_c == M_ROMS || m_state_c == M_CONT || m_state_c == M_RCMD) && end_cnt1;//拉低2us
即当主机处于M_ROMS|| M_CONT || M_RCMD ,从机近些写操作,向从机写入八比特数据,
写数据是一比特一比特的数据写入,写入一个比特需要60us,进入释放总线状态,S_RELE,一个字节没有写完则继续进行写入,释放总线 3us (至少1us),即s_rele2s_low,然后主机拉低总线至少1us,进行写“0”或写“1”,再进入释放总线状态,直到一个字节数据写完,从机从s_rele2s_done,释放总线 3us (至少1us)。
读温度暂存器:当主机处于M_RTMP,从机进行读操作,主机拉低总线至少1us,进行读数据,读1bit需要60us,直到2字节数据读完(低字节数据LSB到高字节MSB)一共16位。
计数器
计数器主要记主状态机状态转移时间,和从状态机的读写时间,以及数据位数
设置时间参数:
parameter TIME_1US = 50, //基本时间1us //主状态机延时 TIME_RST = 500, //复位脉冲 500us TIME_REL = 20, //主机释放总线 20us TIME_PRE = 200, //主机接收存在脉冲 200us TIME_WAIT = 750000, //主机发完温度转换命令 等待750ms //从状态机的延时 TIME_LOW = 2, //主机拉低总线 2us TIME_RW = 60, //主机读、写1bit 60us TIME_REC = 3; //主机读写完1bit释放总线 3us包括 rele_low,rele_done
bit计数器主要用于记写入一个字节数据或读出两个字节数据
assign add_cnt_bit = s_state_c == S_RELE && end_cnt1; // 从机处于RELE状态,时隙恢复时间,表明1 bit 数据传输完成 assign end_cnt_bit = add_cnt_bit && cnt_bit == ((m_state_c == M_RTMP)?16-1:8-1);
slave_ack:采样传感器的存在脉冲
always @(posedge clk or negedge rst_n)begin if(!rst_n)begin slave_ack <= 1'b1; end //接收应答状态 计数器计到60us 进行采样 else if(m_state_c == M_RACK && cnt0 == 60 && end_cnt_1us)begin slave_ack <= dq_din; end end
输出信号
//dq_out_en always @(posedge clk or negedge rst_n)begin if(!rst_n)begin dq_out_en <= 0; end else if(m_idle2m_rest | s_idle2s_low | s_rele2s_low | m_wait2m_rest)begin dq_out_en <= 1'b1; //输出 dq_out end else if(m_rest2m_rele | s_send2s_rele | s_low2s_samp)begin dq_out_en <= 1'b0; //不输出 dq_out end end //dq_out always @(posedge clk or negedge rst_n)begin if(!rst_n)begin dq_out <= 0; end else if(m_idle2m_rest | s_idle2s_low | s_rele2s_low | m_wait2m_rest)begin dq_out <= 1'b0; end else if(s_low2s_send)begin dq_out <= wr_data[cnt_bit]; end end
温度采集转换并输出:
//orign_data 温度采集 always @(posedge clk or negedge rst_n)begin if(!rst_n)begin orign_data <= 0; end else if(s_state_c == S_SAMP && cnt1 == 12 && end_cnt_1us)begin //温度采集,在时隙起始后15us内采样 orign_data[cnt_bit] <= dq_din; end end //temp_data 温度判断 always @(posedge clk or negedge rst_n)begin if(!rst_n)begin temp_data <= 0; end else if(s_state_c == S_SAMP && cnt_bit == 15 && s_samp2s_rele)begin if(orign_data[15]) //判断正负温度,决定是否需要做补码-原码转化 temp_data <= ~orign_data[10:0] + 1'b1; //负温 则取反加1 else temp_data <= orign_data[10:0]; //正温 end end /* 实际的温度值为 temp_data * 0.0625; 为了保留4位小数精度,将实际温度值放大了10000倍, 即 temp_data * 625; */ assign temp_data_w = temp_data * 625; //组合逻辑计算十进制温度 //temp_out always @(posedge clk or negedge rst_n)begin if(!rst_n)begin temp_out <= 0; end else if(m_state_c == M_RTMP && s_rele2s_done)begin temp_out <= temp_data_w; end end //temp_out_vld 指示温度值输出有效 always @(posedge clk or negedge rst_n)begin if(!rst_n)begin temp_out_vld <= 0; end else begin temp_out_vld <= m_state_c == M_RTMP && s_rele2s_done; end end
状态跳转条件
主状态机:
assign m_idle2m_rest = m_state_c == M_IDLE && (1'b1); //进入m_idle状态,下一个时钟周期上升沿将进入复位状态 assign m_rest2m_rele = m_state_c == M_REST && (end_cnt0); assign m_rele2m_rack = m_state_c == M_RELE && (end_cnt0); assign m_rack2m_roms = m_state_c == M_RACK && (end_cnt0 && slave_ack == 1'b0); assign m_roms2m_cont = m_state_c == M_ROMS && (s_state_c == S_DONE && flag == 1'b0); assign m_roms2m_rcmd = m_state_c == M_ROMS && (s_state_c == S_DONE && flag == 1'b1); assign m_cont2m_wait = m_state_c == M_CONT && (s_state_c == S_DONE); assign m_wait2m_rest = m_state_c == M_WAIT && (end_cnt0); assign m_rcmd2m_rtmp = m_state_c == M_RCMD && (s_state_c == S_DONE); assign m_rtmp2m_idle = m_state_c == M_RTMP && (s_state_c == S_DONE);
从状态机:
assign s_idle2s_low = s_state_c == S_IDLE && (m_state_c == M_ROMS || m_state_c == M_CONT || m_state_c == M_RCMD || m_state_c == M_RTMP); assign s_low2s_send = s_state_c == S_LOW && (m_state_c == M_ROMS || m_state_c == M_CONT || m_state_c == M_RCMD) && end_cnt1; assign s_low2s_samp = s_state_c == S_LOW && (m_state_c == M_RTMP && end_cnt1); assign s_send2s_rele = s_state_c == S_SEND && (end_cnt1); assign s_samp2s_rele = s_state_c == S_SAMP && (end_cnt1); assign s_rele2s_low = s_state_c == S_RELE && (end_cnt1 && end_cnt_bit == 1'b0); assign s_rele2s_done = s_state_c == S_RELE && (end_cnt1 && end_cnt_bit == 1'b1);
3.2 代码
3.2 状态跳转条件
主状态机状态跳转条件:
assign m_idle2m_rest = m_state_c == M_IDLE && (1'b1); //进入m_idle状态,下一个时钟周期上升沿将进入复位状态 assign m_rest2m_rele = m_state_c == M_REST && (end_cnt0); assign m_rele2m_rack = m_state_c == M_RELE && (end_cnt0); assign m_rack2m_roms = m_state_c == M_RACK && (end_cnt0 && slave_ack == 1'b0); assign m_roms2m_cont = m_state_c == M_ROMS && (s_state_c == S_DONE && flag == 1'b0); assign m_roms2m_rcmd = m_state_c == M_ROMS && (s_state_c == S_DONE && flag == 1'b1); assign m_cont2m_wait = m_state_c == M_CONT && (s_state_c == S_DONE); assign m_wait2m_rest = m_state_c == M_WAIT && (end_cnt0); assign m_rcmd2m_rtmp = m_state_c == M_RCMD && (s_state_c == S_DONE); assign m_rtmp2m_idle = m_state_c == M_RTMP && (s_state_c == S_DONE);
从状态机:
assign s_idle2s_low = s_state_c == S_IDLE && (m_state_c == M_ROMS || m_state_c == M_CONT || m_state_c == M_RCMD || m_state_c == M_RTMP); assign s_low2s_send = s_state_c == S_LOW && (m_state_c == M_ROMS || m_state_c == M_CONT || m_state_c == M_RCMD) && end_cnt1; assign s_low2s_samp = s_state_c == S_LOW && (m_state_c == M_RTMP && end_cnt1); assign s_send2s_rele = s_state_c == S_SEND && (end_cnt1); assign s_samp2s_rele = s_state_c == S_SAMP && (end_cnt1); assign s_rele2s_low = s_state_c == S_RELE && (end_cnt1 && end_cnt_bit == 1'b0); assign s_rele2s_done = s_state_c == S_RELE && (end_cnt1 && end_cnt_bit == 1'b1);
3.3 代码
ds18_driver:
module ds18_driver(
input clk ,
input rst_n ,
input dq_din ,
output reg dq_out ,
output reg dq_out_en ,
output reg temp_sign ,//温度值符号位 0:正 1:负温
output reg [23:0] temp_out ,
output reg temp_out_vld
);
//状态机参数
localparam M_IDLE = 9'b0_0000_0001,//空闲状态
M_REST = 9'b0_0000_0010,//复位
M_RELE = 9'b0_0000_0100,//释放总线 -- ds18b20等待
M_RACK = 9'b0_0000_1000,//接收应答 -- 主机接收存在脉冲
M_ROMS = 9'b0_0001_0000,//rom指令 -- 跳过rom指令
M_CONT = 9'b0_0010_0000,//转化
M_WAIT = 9'b0_0100_0000,//等待 -- 12bit分辨率下的温度转化时间
M_RCMD = 9'b0_1000_0000,//读命令 -- 读暂存器命令
M_RTMP = 9'b1_0000_0000;//读温度 -- 产生读时隙 -- 接收2字节带符号位的补码温度值
localparam S_IDLE = 6'b00_0001,
S_LOW = 6'b00_0010,//拉低总线 -- 时隙的开始
S_SEND = 6'b00_0100,//发送 -- 15us内
S_SAMP = 6'b00_1000,//采样 -- 在15us内
S_RELE = 6'b01_0000,//释放 -- 时隙的恢复时间
S_DONE = 6'b10_0000;
parameter TIME_1US = 50, //基本时间1us
//主状态机延时
TIME_RST = 500, //复位脉冲 500us
TIME_REL = 20, //主机释放总线 20us
TIME_PRE = 200, //主机接收存在脉冲 200us
TIME_WAIT = 750000, //主机发完温度转换命令 等待750ms
//从状态机的延时
TIME_LOW = 2, //主机拉低总线 2us
TIME_RW = 60, //主机读、写1bit 60us
TIME_REC = 3; //主机读写完1bit释放总线 3us
localparam CMD_ROMS = 8'hCC,//跳过ROM指令
CMD_CONT = 8'h44,//温度转化
CMD_RTMP = 8'hBE;//读暂存器
//信号定义
reg [8:0] m_state_c ;//主状态机
reg [8:0] m_state_n ;
reg [5:0] s_state_c ;//从状态机
reg [5:0] s_state_n ;
reg [5:0] cnt_1us ;//1us计数器
wire add_cnt_1us ;
wire end_cnt_1us ;
reg [19:0] cnt0 ;//复位脉冲、释放、存在脉冲、等待750ms
wire add_cnt0 ;
wire end_cnt0 ;
reg [19:0] X ;
reg [5:0] cnt1 ;//计数从状态机每个状态多少us
wire add_cnt1 ;
wire end_cnt1 ;
reg [5:0] Y ;
reg [4:0] cnt_bit ;
wire add_cnt_bit ;
wire end_cnt_bit ;
reg slave_ack ;//接收存在脉冲
reg flag ;//0:发温度转换命令 1:发温度读取命令
reg [7:0] wr_data ;
reg [15:0] orign_data ;//采样温度值寄存器
reg [10:0] temp_data ;
wire [23:0] temp_data_w ;//组合逻辑计算实际温度值 十进制
wire m_idle2m_rest ;
wire m_rest2m_rele ;
wire m_rele2m_rack ;
wire m_rack2m_roms ;
wire m_roms2m_cont ;
wire m_roms2m_rcmd ;
wire m_cont2m_wait ;
wire m_wait2m_rest ;
wire m_rcmd2m_rtmp ;
wire m_rtmp2m_idle ;
wire s_idle2s_low ;
wire s_low2s_send ;
wire s_low2s_samp ;
wire s_send2s_rele ;
wire s_samp2s_rele ;
wire s_rele2s_low ;
wire s_rele2s_done ;
//状态机设计
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
m_state_c <= M_IDLE;
end
else begin
m_state_c <= m_state_n;
end
end
always @(*)begin
case(m_state_c)
M_IDLE:begin
if(m_idle2m_rest)
m_state_n = M_REST;
else
m_state_n = m_state_c;
end
M_REST:begin
if(m_rest2m_rele)
m_state_n = M_RELE;
else
m_state_n = m_state_c;
end
M_RELE:begin
if(m_rele2m_rack)
m_state_n = M_RACK;
else
m_state_n = m_state_c;
end
M_RACK:begin
if(m_rack2m_roms)
m_state_n = M_ROMS;
else
m_state_n = m_state_c;
end
M_ROMS:begin
if(m_roms2m_cont)
m_state_n = M_CONT;
else if(m_roms2m_rcmd)
m_state_n = M_RCMD;
else
m_state_n = m_state_c;
end
M_CONT:begin
if(m_cont2m_wait)
m_state_n = M_WAIT;
else
m_state_n = m_state_c;
end
M_WAIT:begin
if(m_wait2m_rest)
m_state_n = M_REST;
else
m_state_n = m_state_c;
end
M_RCMD:begin
if(m_rcmd2m_rtmp)
m_state_n = M_RTMP;
else
m_state_n = m_state_c;
end
M_RTMP:begin
if(m_rtmp2m_idle)
m_state_n = M_IDLE;
else
m_state_n = m_state_c;
end
default:m_state_n = M_IDLE;
endcase
end
assign m_idle2m_rest = m_state_c == M_IDLE && (1'b1); //进入m_idle状态,下一个时钟周期上升沿将进入复位状态
assign m_rest2m_rele = m_state_c == M_REST && (end_cnt0);
assign m_rele2m_rack = m_state_c == M_RELE && (end_cnt0);
assign m_rack2m_roms = m_state_c == M_RACK && (end_cnt0 && slave_ack == 1'b0);
assign m_roms2m_cont = m_state_c == M_ROMS && (s_state_c == S_DONE && flag == 1'b0);
assign m_roms2m_rcmd = m_state_c == M_ROMS && (s_state_c == S_DONE && flag == 1'b1);
assign m_cont2m_wait = m_state_c == M_CONT && (s_state_c == S_DONE);
assign m_wait2m_rest = m_state_c == M_WAIT && (end_cnt0);
assign m_rcmd2m_rtmp = m_state_c == M_RCMD && (s_state_c == S_DONE);
assign m_rtmp2m_idle = m_state_c == M_RTMP && (s_state_c == S_DONE);
//从状态机
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
s_state_c <= S_IDLE;
end
else begin
s_state_c <= s_state_n;
end
end
always @(*)begin
case(s_state_c)
S_IDLE:begin
if(s_idle2s_low)
s_state_n = S_LOW;
else
s_state_n = s_state_c;
end
S_LOW :begin
if(s_low2s_send)
s_state_n = S_SEND;
else if(s_low2s_samp)
s_state_n = S_SAMP;
else
s_state_n = s_state_c;
end
S_SEND:begin
if(s_send2s_rele)
s_state_n = S_RELE;
else
s_state_n = s_state_c;
end
S_SAMP:begin
if(s_samp2s_rele)
s_state_n = S_RELE;
else
s_state_n = s_state_c;
end
S_RELE:begin
if(s_rele2s_low)
s_state_n = S_LOW;
else if(s_rele2s_done)
s_state_n = S_DONE;
else
s_state_n = s_state_c;
end
S_DONE:begin //进入s_done状态,下一个时钟周期上升沿将回到初始状态
s_state_n = S_IDLE;
end
default:s_state_n = S_IDLE;
endcase
end
assign s_idle2s_low = s_state_c == S_IDLE && (m_state_c == M_ROMS ||
m_state_c == M_CONT || m_state_c == M_RCMD || m_state_c == M_RTMP);
assign s_low2s_send = s_state_c == S_LOW && (m_state_c == M_ROMS ||
m_state_c == M_CONT || m_state_c == M_RCMD) && end_cnt1;
assign s_low2s_samp = s_state_c == S_LOW && (m_state_c == M_RTMP && end_cnt1);
assign s_send2s_rele = s_state_c == S_SEND && (end_cnt1);
assign s_samp2s_rele = s_state_c == S_SAMP && (end_cnt1);
assign s_rele2s_low = s_state_c == S_RELE && (end_cnt1 && end_cnt_bit == 1'b0);
assign s_rele2s_done = s_state_c == S_RELE && (end_cnt1 && end_cnt_bit == 1'b1);
//计数器
always @(posedge clk or negedge rst_n)begin //1us计数
if(!rst_n)begin
cnt_1us <= 0;
end
else if(add_cnt_1us)begin
if(end_cnt_1us)begin
cnt_1us <= 0;
end
else begin
cnt_1us <= cnt_1us + 1;
end
end
end
assign add_cnt_1us = m_state_c != M_IDLE; //非IDLE状态持续计数
assign end_cnt_1us = add_cnt_1us && cnt_1us == TIME_1US-1;
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt0 <= 0;
end
else if(add_cnt0)begin
if(end_cnt0)begin
cnt0 <= 0;
end
else begin
cnt0 <= cnt0 + 1;
end
end
end
assign add_cnt0 = (m_state_c == M_REST || m_state_c == M_RELE || m_state_c == M_RACK || m_state_c == M_WAIT) && end_cnt_1us;
assign end_cnt0 = add_cnt0 && cnt0 == X-1;
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
X <= 0;
end
else if(m_state_c == M_REST)begin // 复位:500us (480us)
X <= TIME_RST;
end
else if(m_state_c == M_RELE)begin // 释放总线:20us (15-60us 内)
X <= TIME_REL;
end
else if(m_state_c == M_RACK)begin // 接收应答:200us (60-240us)
X <= TIME_PRE;
end
else if(m_state_c == M_WAIT)begin // 等待:750ms (等待转换完成)
X <= TIME_WAIT;
end
end
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt1 <= 0;
end
else if(add_cnt1)begin
if(end_cnt1)begin
cnt1 <= 0;
end
else begin
cnt1 <= cnt1 + 1;
end
end
end
assign add_cnt1 = (s_state_c == S_LOW || s_state_c == S_SEND ||
s_state_c == S_SAMP || s_state_c == S_RELE) && end_cnt_1us;
assign end_cnt1 = add_cnt1 && cnt1 == Y-1;
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
Y <= 0;
end
else if(s_state_c == S_LOW)begin
Y <= TIME_LOW; // 主机拉低总线 2us (大于1us)
end
else if(s_state_c == S_SEND || s_state_c == S_SAMP)begin
Y <= TIME_RW; // 主机读写1bit 60us ()
end
else begin
Y <= TIME_REC; // 主机读写完1bit释放总线 3us (至少1us)
end
end
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_bit <= 0;
end
else if(add_cnt_bit)begin
if(end_cnt_bit)begin
cnt_bit <= 0;
end
else begin
cnt_bit <= cnt_bit + 1;
end
end
end
assign add_cnt_bit = s_state_c == S_RELE && end_cnt1; // 从机处于RELE状态,时隙恢复时间,表明1 bit 数据传输完成
assign end_cnt_bit = add_cnt_bit && cnt_bit == ((m_state_c == M_RTMP)?16-1:8-1);
//slave_ack 采样传感器的存在脉冲
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
slave_ack <= 1'b1;
end //接收应答状态 计数器计到60us 进行采样
else if(m_state_c == M_RACK && cnt0 == 60 && end_cnt_1us)begin
slave_ack <= dq_din;
end
end
always @(posedge clk or negedge rst_n)begin //命令发送标志 (区分温度转换和温度读取命令)
if(!rst_n)begin
flag <= 0;
end
else if(m_wait2m_rest)begin
flag <= 1'b1;
end
else if(m_rtmp2m_idle)begin
flag <= 1'b0;
end
end
//输出信号
//dq_out_en
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
dq_out_en <= 0;
end
else if(m_idle2m_rest | s_idle2s_low | s_rele2s_low | m_wait2m_rest)begin
dq_out_en <= 1'b1; //输出 dq_out
end
else if(m_rest2m_rele | s_send2s_rele | s_low2s_samp)begin
dq_out_en <= 1'b0; //不输出 dq_out
end
end
//dq_out
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
dq_out <= 0;
end
else if(m_idle2m_rest | s_idle2s_low | s_rele2s_low | m_wait2m_rest)begin
dq_out <= 1'b0;
end
else if(s_low2s_send)begin
dq_out <= wr_data[cnt_bit];
end
end
//wr_data 命令
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
wr_data <= 0;
end
else if(m_rack2m_roms)begin
wr_data <= CMD_ROMS;
end
else if(m_roms2m_cont)begin
wr_data <= CMD_CONT;
end
else if(m_roms2m_rcmd)begin
wr_data <= CMD_RTMP;
end
end
//orign_data 温度采集
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
orign_data <= 0;
end
else if(s_state_c == S_SAMP && cnt1 == 12 && end_cnt_1us)begin //温度采集,在时隙起始后15us内采样
orign_data[cnt_bit] <= dq_din;
end
end
//temp_data 温度判断
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
temp_data <= 0;
end
else if(s_state_c == S_SAMP && cnt_bit == 15 && s_samp2s_rele)begin
if(orign_data[15]) //判断正负温度,决定是否需要做补码-原码转化
temp_data <= ~orign_data[10:0] + 1'b1; //负温 则取反加1
else
temp_data <= orign_data[10:0]; //正温
end
end
/*
实际的温度值为 temp_data * 0.0625;
为了保留4位小数精度,将实际温度值放大了10000倍,
即 temp_data * 625;
*/
assign temp_data_w = temp_data * 625;
//temp_out
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
temp_out <= 0;
end
else if(m_state_c == M_RTMP && s_rele2s_done)begin
temp_out <= temp_data_w;
end
end
//temp_out_vld 指示温度值输出有效
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
temp_out_vld <= 0;
end
else begin
temp_out_vld <= m_state_c == M_RTMP && s_rele2s_done;
end
end
//temp_sign (输出至数码管显示时使用)
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
temp_sign <= 0;
end
else if(s_state_c == S_SAMP && cnt_bit == 15 && s_samp2s_rele)begin
temp_sign <= orign_data[15];
end
end
endmodule
control:
module control(
input clk ,
input rst_n ,
input din_sign ,
input [23:0] din ,//输入24位十进制温度值(*10000)
input din_vld ,
output wire dout_sign ,
output wire[23:0] dout ,//输出每位数码管对应显示的值
output reg dout_vld
);
//中间信号定义
reg [23:0] din_r ;
reg din_vld_r0 ;
reg din_vld_r1 ;
wire [7:0] tmp_int_w ;//整数部分
reg [7:0] tmp_int_r ;
wire [3:0] tmp_int_w2 ;
wire [3:0] tmp_int_w1 ;
wire [3:0] tmp_int_w0 ;
reg [3:0] tmp_int_r2 ;
reg [3:0] tmp_int_r1 ;
reg [3:0] tmp_int_r0 ;
wire [15:0] tmp_dot_w ;//小数部分
reg [15:0] tmp_dot_r ;
wire [3:0] tmp_dot_w3 ;
wire [3:0] tmp_dot_w0 ;
wire [3:0] tmp_dot_w1 ;
wire [3:0] tmp_dot_w2 ;
reg [3:0] tmp_dot_r3 ;
reg [3:0] tmp_dot_r0 ;
reg [3:0] tmp_dot_r1 ;
reg [3:0] tmp_dot_r2 ;
//din_r
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
din_r <= 0;
end
else if(din_vld)begin
din_r <= din;
end
end
//din_vld_r0 din_vld_r1
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
din_vld_r0 <= 0;
din_vld_r1 <= 0;
end
else begin
din_vld_r0 <= din_vld;
din_vld_r1 <= din_vld_r0;
end
end
assign tmp_int_w = din_r/10000;//拆分整数部分及小数部分
assign tmp_dot_w = din_r%10000;
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
tmp_int_r <= 0;
end
else if(din_vld_r0)begin
tmp_int_r <= tmp_int_w;
tmp_dot_r <= tmp_dot_w;
end
end
assign tmp_int_w2 = tmp_int_r/100;//百位
assign tmp_int_w1 = tmp_int_r/10%10 ;//十位
assign tmp_int_w0 = tmp_int_r%10;//个位
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
tmp_int_r2 <= 0;
tmp_int_r1 <= 0;
tmp_int_r0 <= 0;
end
else if(din_vld_r1)begin
tmp_int_r2 <= tmp_int_w2;
tmp_int_r1 <= tmp_int_w1;
tmp_int_r0 <= tmp_int_w0;
end
end
assign tmp_dot_w0 = tmp_dot_r/1000;
assign tmp_dot_w1 = tmp_dot_r/100%10;
assign tmp_dot_w2 = tmp_dot_r/10%10;
assign tmp_dot_w3 = tmp_dot_r%10;
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
tmp_dot_r0 <= 0;
tmp_dot_r1 <= 0;
tmp_dot_r2 <= 0;
tmp_dot_r3 <= 0;
end
else if(din_vld_r1)begin
tmp_dot_r0 <= tmp_dot_w0;
tmp_dot_r1 <= tmp_dot_w1;
tmp_dot_r2 <= tmp_dot_w2;
tmp_dot_r3 <= tmp_dot_w3;
end
end
assign dout = {tmp_int_r1,tmp_int_r0,tmp_dot_r0,tmp_dot_r1,tmp_dot_r2,tmp_dot_r3};
always @(posedge clk or negedge rst_n)begin
if(!rst_n)begin
dout_vld <= 1'b0;
end
else begin
dout_vld <= din_vld_r1;
end
end
assign dout_sign = din_sign;
endmoduleseg_driver:
module seg_driver(
input clk ,//时钟信号
input rst_n ,//复位信号
input din_sign,
input [23:0] din ,
input din_vld ,
output reg [5:0] sel ,
output reg [7:0] dig
);
//参数定义
parameter TIME_1MS = 25_000,
ZERO = 7'b100_0000,
ONE = 7'b111_1001,
TWO = 7'b010_0100,
THREE = 7'b011_0000,
FOUR = 7'b001_1001,
FIVE = 7'b001_0010,
SIX = 7'b000_0010,
SEVEN = 7'b111_1000,
EIGHT = 7'b000_0000,
NINE = 7'b001_0000,
P = 7'b000_1111,
N = 7'b011_1111;
//信号定义
reg [19:0] cnt_1ms;//扫描频率计数器
wire add_cnt_1ms;
wire end_cnt_1ms;
reg [3 :0] disp_num;
reg dot;
//数码管扫描频率计数
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
cnt_1ms <= 0;
end
else if(add_cnt_1ms) begin
if(end_cnt_1ms)begin
cnt_1ms <= 0;
end
else begin
cnt_1ms <= cnt_1ms + 1;
end
end
end
assign add_cnt_1ms = 1'b1;
assign end_cnt_1ms = add_cnt_1ms && cnt_1ms == TIME_1MS - 1;
//seg_sel 数码管片选信号
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
sel <= 6'b111110;
end
else if(end_cnt_1ms) begin
sel <= {sel[4:0],sel[5]};
end
end
//译码
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
disp_num <= 0;
end
else begin
case(sel)
6'b011111:begin disp_num <= din_sign?4'ha:4'hb;dot <= 1; end
6'b101111:begin disp_num <= din[23:20];dot <= 1;end
6'b110111:begin disp_num <= din[19:16];dot <= 0;end
6'b111011:begin disp_num <= din[15:12];dot <= 1;end
6'b111101:begin disp_num <= din[11:8] ;dot <= 1;end
6'b111110:begin disp_num <= din[7 :4] ;dot <= 1;end
default :begin disp_num <= 4'hF ;end
endcase
end
end
//segment 段选译码
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
dig <= 8'hff;
end
else begin//显示小数点
case(disp_num)
4'h0:dig <= {dot,ZERO } ;
4'h1:dig <= {dot,ONE } ;
4'h2:dig <= {dot,TWO } ;
4'h3:dig <= {dot,THREE} ;
4'h4:dig <= {dot,FOUR } ;
4'h5:dig <= {dot,FIVE } ;
4'h6:dig <= {dot,SIX } ;
4'h7:dig <= {dot,SEVEN} ;
4'h8:dig <= {dot,EIGHT} ;
4'h9:dig <= {dot,NINE } ;
4'ha:dig <= {dot,N } ;
4'hb:dig <= {dot,P } ;
default:dig <= 8'hff ;
endcase
end
end
endmodule
temp_top
module temp_top (
input clk ,
input rst_n ,
inout dq ,
output [5:0] sel ,
output [7:0] seg
);
//信号定义
wire dq_in ;
wire dq_out ;
wire dq_out_en ;
wire temp_sign ;
wire [23:0] temp_out ;
wire temp_out_vld;
wire dout_sign ;
wire [23:0] dout ;
wire dout_vld ;
assign dq = dq_out_en?dq_out:1'bz;
assign dq_in = dq;
//模块例化
ds18_driver u_ds18_driver(
.clk (clk ),
.rst_n (rst_n ),
.dq_din (dq_in ),//dq总线DS18B20输出
.dq_out (dq_out ),//dq总线FPGA输出,DS18B20输入
.dq_out_en (dq_out_en ),//dq总线输出使能控制信号
.temp_sign (temp_sign ),//温度的正负
.temp_out (temp_out ),//输出十进制温度
.temp_out_vld (temp_out_vld ) //温度采集数据有效
);
control u_control(
.clk (clk ),
.rst_n (rst_n ),
.din_sign (temp_sign ),
.din (temp_out ),
.din_vld (temp_out_vld ),
.dout_sign (dout_sign ),
.dout (dout ),//输出温度值数码管对应位置的bcd码
.dout_vld (dout_vld )
);
seg_driver seg_driver(
.clk (clk ),
.rst_n (rst_n ),
.din_sign (temp_sign ),
.din (dout ),
.din_vld (dout_vld ),
.sel (sel ),
.dig (seg )
);
endmodule //temp_top四 上板验证
五 总结
多调试,多动手,画好时序图,画好逻辑图,注意状态转移条件。