转自:http://www.toutiao.com/i6352369801863627265/
在实践中,机器人想要完成藏猫猫游戏,就要先对所处的环境有一定的感知。
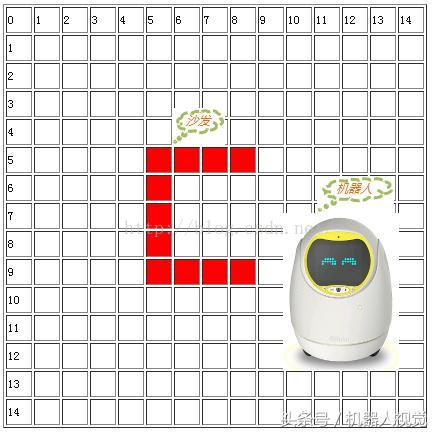
首先,机器人通过深度摄像头或测距传感器如激光等,获取周围环境的地图信息,这样的地图信息还不方便机器人实用,如下简单示意图,
其次,机器人把这些信息与视觉感知引擎交互,通过降噪、滤波、变换等进一步处理,实现类似dog、蝙蝠的初级视觉智能,如下图所示:
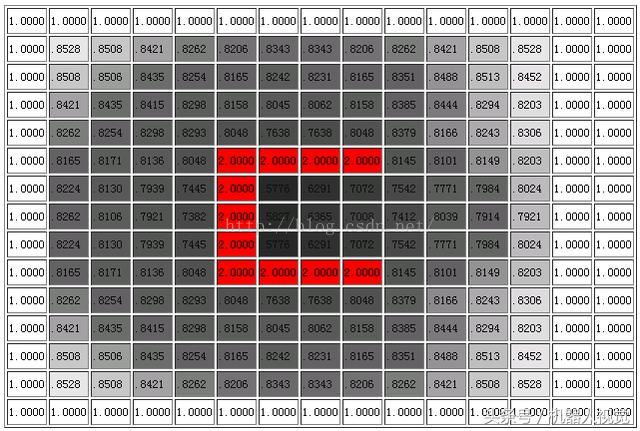
这里面包含了物体的形状信息包括平移不变性、缩放不变性,旋转不变性、镜像对称性,还有与视觉相关的运动性信息等,详细可参考笔者头条号的其他文章。
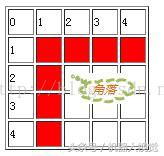
在高级视觉智能下,机器人可以自主决定藏身地点,但在当前初级视觉智能下,可以在业务层面主动告知机器人“去哪里藏身”,如下图所示,可以让机器人找个角落点藏起来,给出期望藏身地点:第0行第0列,
通过与视觉感知引擎交互,获取期望藏身信息的特征0.8293,如下图右所示:
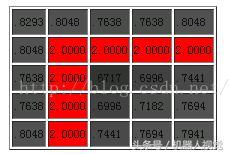
最后,在机器人所在的环境中,搜索0.8293±0.005(误差可自定),获取可能的藏身地点,输入起止点及最优目标,视觉感知引擎可以为机器人规划一条自主运动路径。
视觉感知引擎,可以为机器人或无人机提供实时的平面或立体的环境信息服务,提供视觉识别服务与自主运动路径或轨迹的规划服务,让智能硬件轻松拥有视觉智能,具体使用方法可参考网站机器人视觉感知与自主运动云服务 http://www.aiethan.com。