前言
PCL环境的配置总是令人头疼,尤其是对新手来说,源码的下载、编译、安装都显得尤为复杂,本博客将提供自己编译好的文件,5分钟内完成环境配置。经测试,在win7、win10、win11;VS2013、VS2017、VS2019、VS2022上均配置成功(目前还没失败过,只要你会使用鼠标)

一、PCL是什么?
点云库 (PCL) 是一个独立的、大规模的、开放的 2D/3D 图像和点云处理项目。PCL 是根据BSD 许可条款发布的,因此可免费用于商业和研究用途。
二、配置步骤
1.下载文件
百度网盘:
链接:https://pan.baidu.com/s/1jf1yMmZuT_0o8bJmsx8m7w
提取码:在文末哦(别傻傻地复制这句话!)
–来自百度网盘超级会员V2的分享
CSDN:编译好的PCL1.11.0
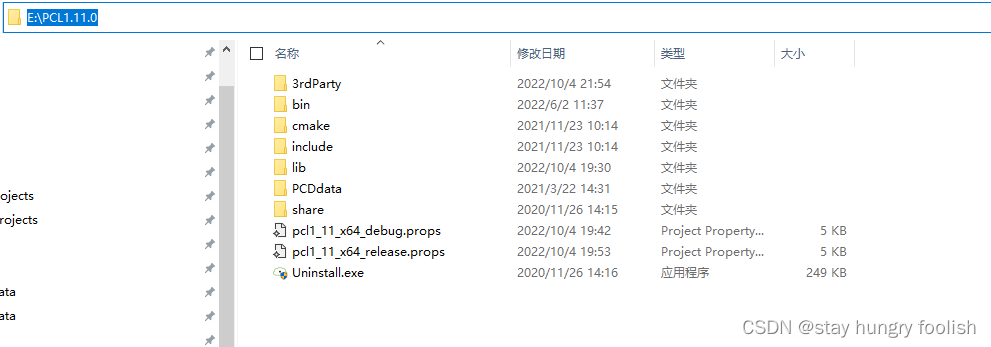
注意:直接解压在E盘
不解压在E盘也可以,后续替换环境变量和属性表文件内的地址就行(props文件)
下载解压后如下图所示
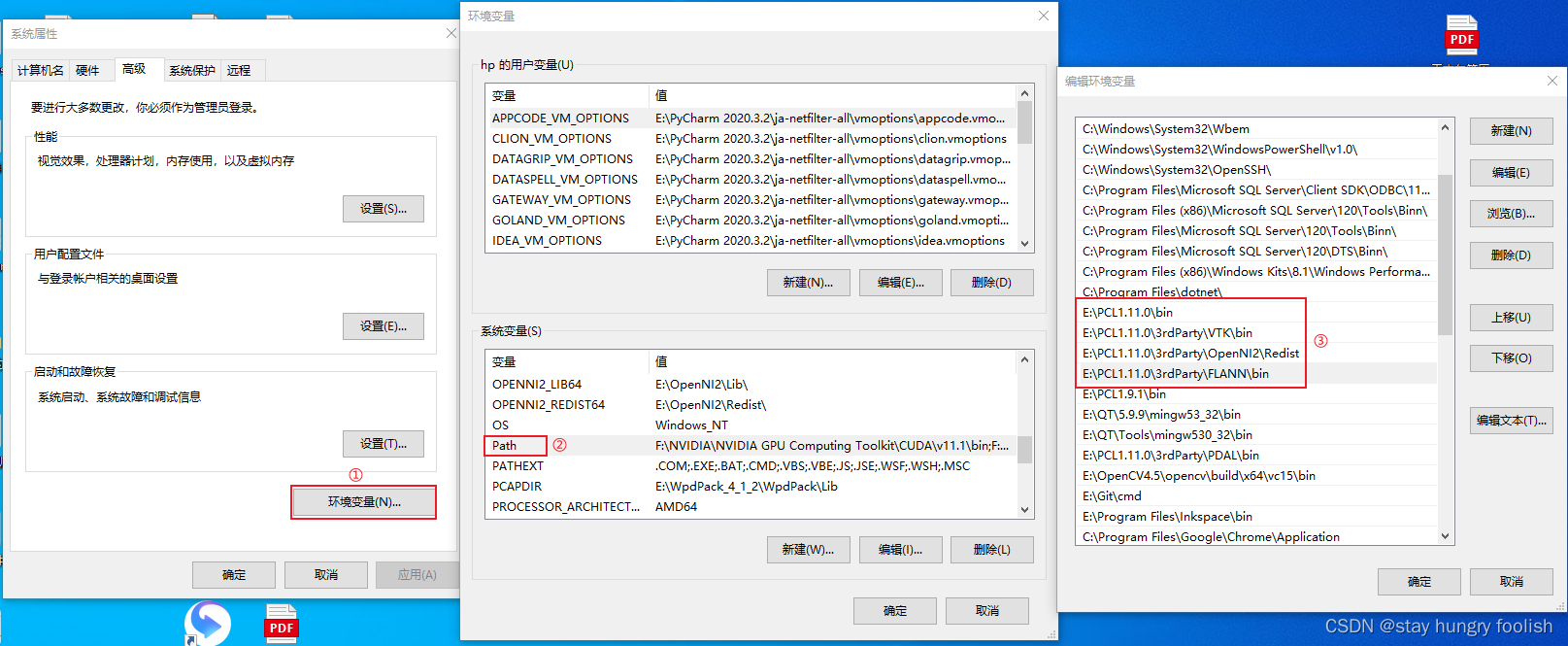
2.配置环境变量
- 点击电脑
设置 - 搜索
编辑系统环境变量 - 点击
Path - 添加如下变量
E:\PCL1.11.0\bin
E:\PCL1.11.0\3rdParty\VTK\bin
E:\PCL1.11.0\3rdParty\OpenNI2\Redist
E:\PCL1.11.0\3rdParty\FLANN\bin
具体操作如下图所示
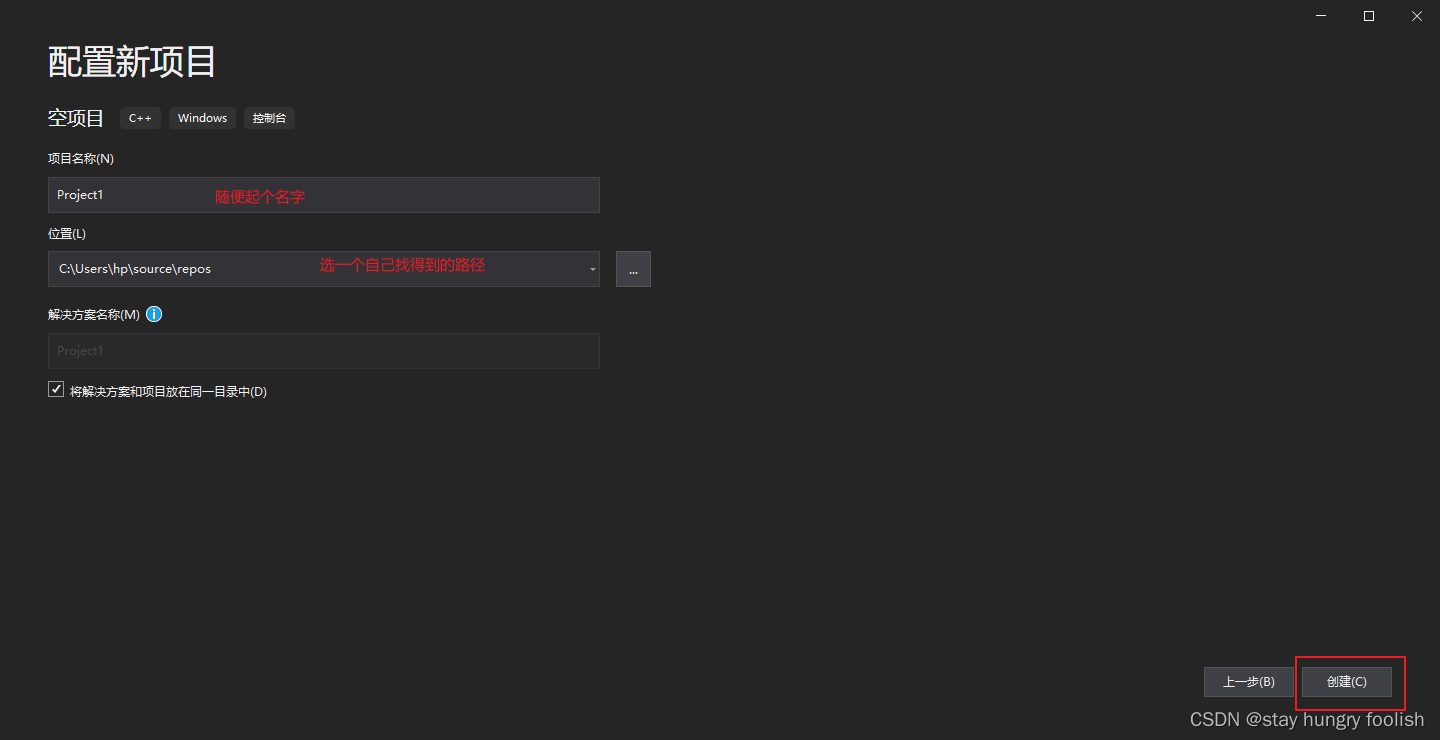
3.Visual Studio配置属性表(以VS2019为例)
1.创建新项目


注:x86改成x64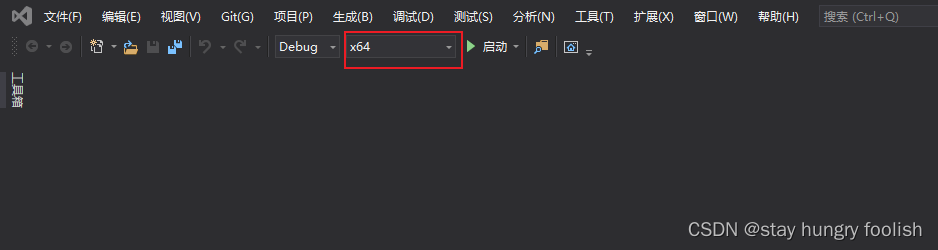
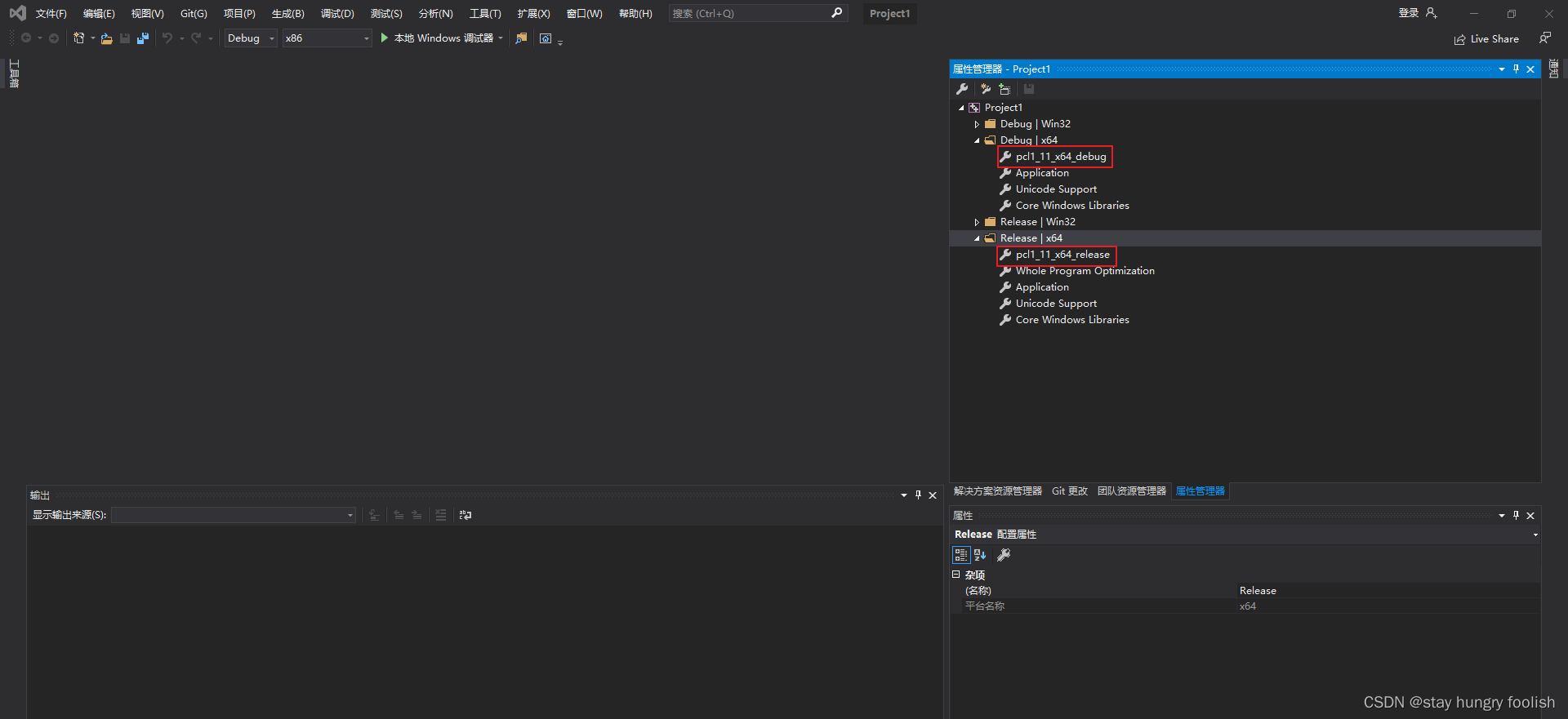
- 添加属性表
视图->其他窗口->资源管理器
右键Debug|x64->添加现有属性表->添加pcl1_11_x64_debug.props(在下载解压后的文件夹里)
右键Release|x64->添加现有属性表->添加pcl1_11_x64_release.props(在下载解压后的文件夹里)
效果如图
4测试
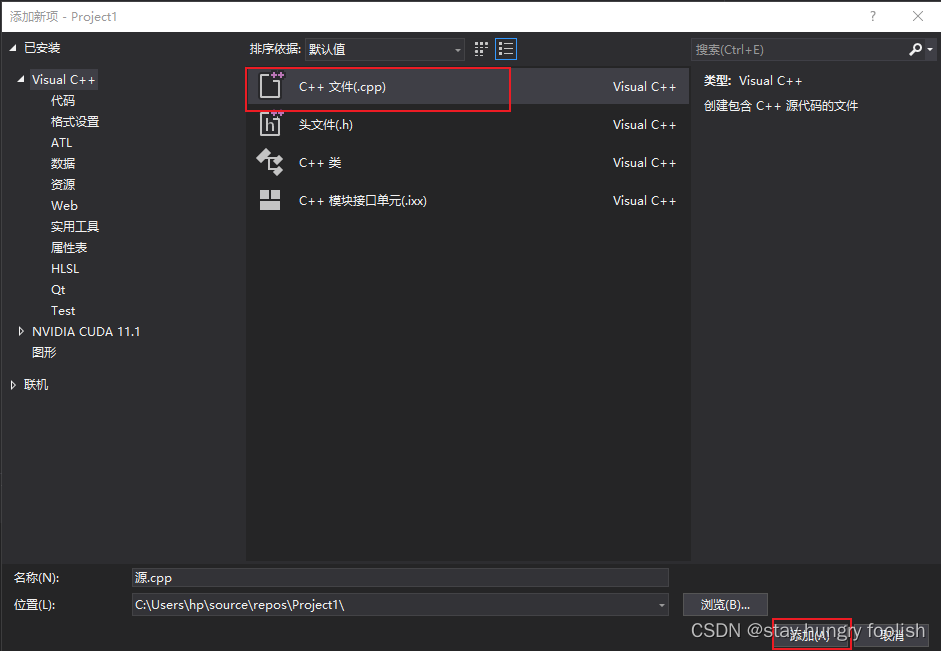
点击解决方案资源管理器->右键源文件->添加->新建项
添加c++文件
黏贴测试代码
#include <iostream>
#include <pcl/common/common_headers.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/console/parse.h>
int main(int argc, char** argv) {
std::cout << "Test PCL !!!" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr(new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZRGB point;
point.x = 0.5 * cosf(pcl::deg2rad(angle));
point.y = sinf(pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 |
static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back(point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int)point_cloud_ptr->points.size();
point_cloud_ptr->height = 1;
pcl::visualization::CloudViewer viewer("test");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()) {
};
return 0;
}
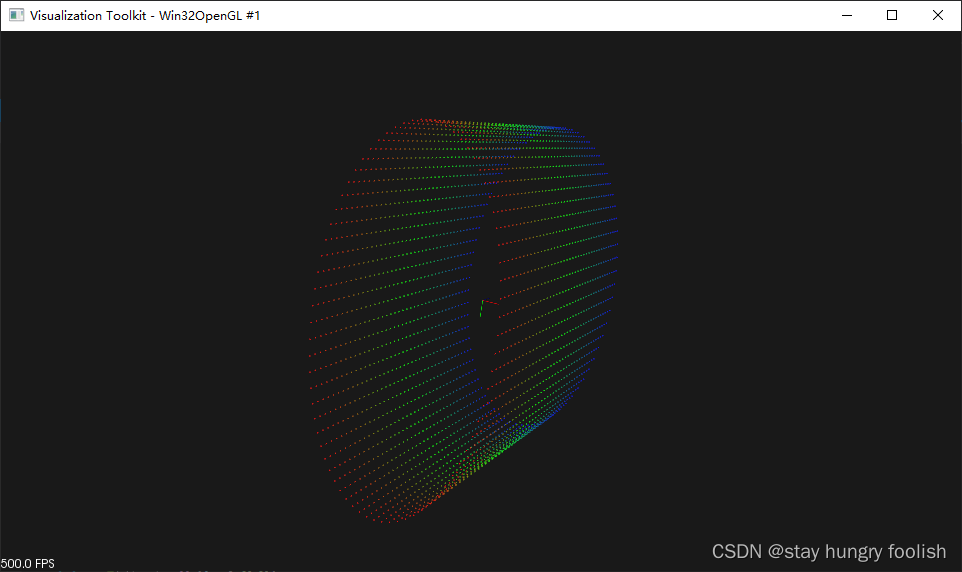
该程序生成椭圆柱面点云,并沿轴向赋色
运行结果如下
总结
以上就是对PCL环境配置的全过程,为爱护新手,已经尽可能详尽,对于有一定VS编程基础的同学来说,只看小标题应该就能配置好,5分钟绰绰有余。不过必须要说明的是,此方法也有不足之处,如:目前只有PCL1.11.0 x64版本,如需最新或特定的版本,仍需自己编译配置,不过如果并没有这种需求,这应该是目前最简单的配置方法了。最后,百度云盘解压密码( 链接过期了,需要的点赞评论加收藏我私发一下~bny7)
私发过好多人结果连句谢谢都没有。。。不点赞收藏的收费了谢谢~