BetaFlight Mark4之“妖怪”声音之二
1. 源由
在BetaFlight Mark4之“妖怪”声音大致做了如下测试:
- 滤波参数调整 (怀疑滤波参数问题,导致振动传入系统,进而桨叶转速变化产生异响)
- 整机螺丝检查(检查电机,机架,飞控,电调,图传等螺丝螺母固定位置是否有松动,导致振动)
- 飞控更换(怀疑飞控电源干扰或高CPU占用率导致电机控制出现问题)
- 桨叶更换(怀疑桨叶受损,导致动平衡异常)
待分析和测试项目:
- 电机更换
- 机架更换
显然,更换电机和机架不失为一种方法。再更换之前还是希望能够进一步的分析这个声音可能的来源。
2. 回顾
之前测试可能存在一定的盲目性,正确的步骤可能应该如下:
- 仔细分析黑匣子数据(原始gyro数据 vs 滤波gyro数据)
- 检查螺丝螺母松动
- 检查各部件松动情况(接收机,图传,摄像头等等)
- 更换新桨叶
- 更换硬件(电机、飞控等)
这个过程就像checklist一样,一步一步的执行,以便更好的定位寻找根本原因(这个才是工程技术应该有的思路,这次一开始发现这个问题的时候,稍微有点偷懒了。经验确实还不太够!)。
3. 分析
前一篇关于“妖怪”声音的测试分析中,大体定位怀疑是:
- 来自电机油门40%左右是振动导致
- 0油门电机扭力不够导致振动异常
可能造成该情况的原因是这半年来的几次炸鸡,导致电机轴承损坏(偏、弯)或者电机本身就不那么正(但是之前没有测过,也不好说)。
BetaFlight Mark4 + 自锁螺母桨叶松动 + 炸机瞬间
BetaFlight Mark4 + 钢筋碰撞 + 反转电机避祸
BetaFlight Mark4 Takeoff Runaway
BetaFlight Mark4 城北公园 小树林翻车集锦
【“血的”的教训】航模飞行危险意外常在,这就是为什么我说的要注意安全!!!
BetaFlight Mark4 + 城北公园 + 撞树炸鸡
4. 优化
由于Betaflight飞控软件上有对RC输入值的滤波过程,因此遥控器端的ADC滤波可以直接关闭。
OpenTX ADC filter is messing up your PID tune. Turn it off
注:这个问题对于文章主题没有什么影响。
通过上述优化后,恢复5寸机BF 4.4.1 默认PID。

BetaFlight Mark4 H7 Dual (BMI270) Vibration&Oscillation Default 1.0
对应BF黑匣子日志资料下载:BetaFlight Mark4 H7BMI270 Vibration&Oscillation Default 1.0
上述默认PID在本机上出现了翻滚以后“bounce back”的情况,这里简单根据BF滚动条的提示,将“Tracking: P & I Gains”设置为1.1,有所好转。
注:关于控制不稳定情况很多,需要仔细判断。应对如何调PID的资料很多,后面我会附一些资料供大家判断,参考大家可能遇到的情况。
BetaFlight Mark4 H7 Dual (BMI270) Vibration&Oscillation Tracking 1.1
对应BF黑匣子日志资料下载:BetaFlight Mark4 H7BMI27 Vibration&Oscillation Tracking 1.1
注:关于这些数据资料,CSDN上传说要2~5个工日之后才能进行审核,目前还在审核中,因此这个黑匣子数据想看的朋友,可以等几天,或者评论区告诉我。
5. 数据
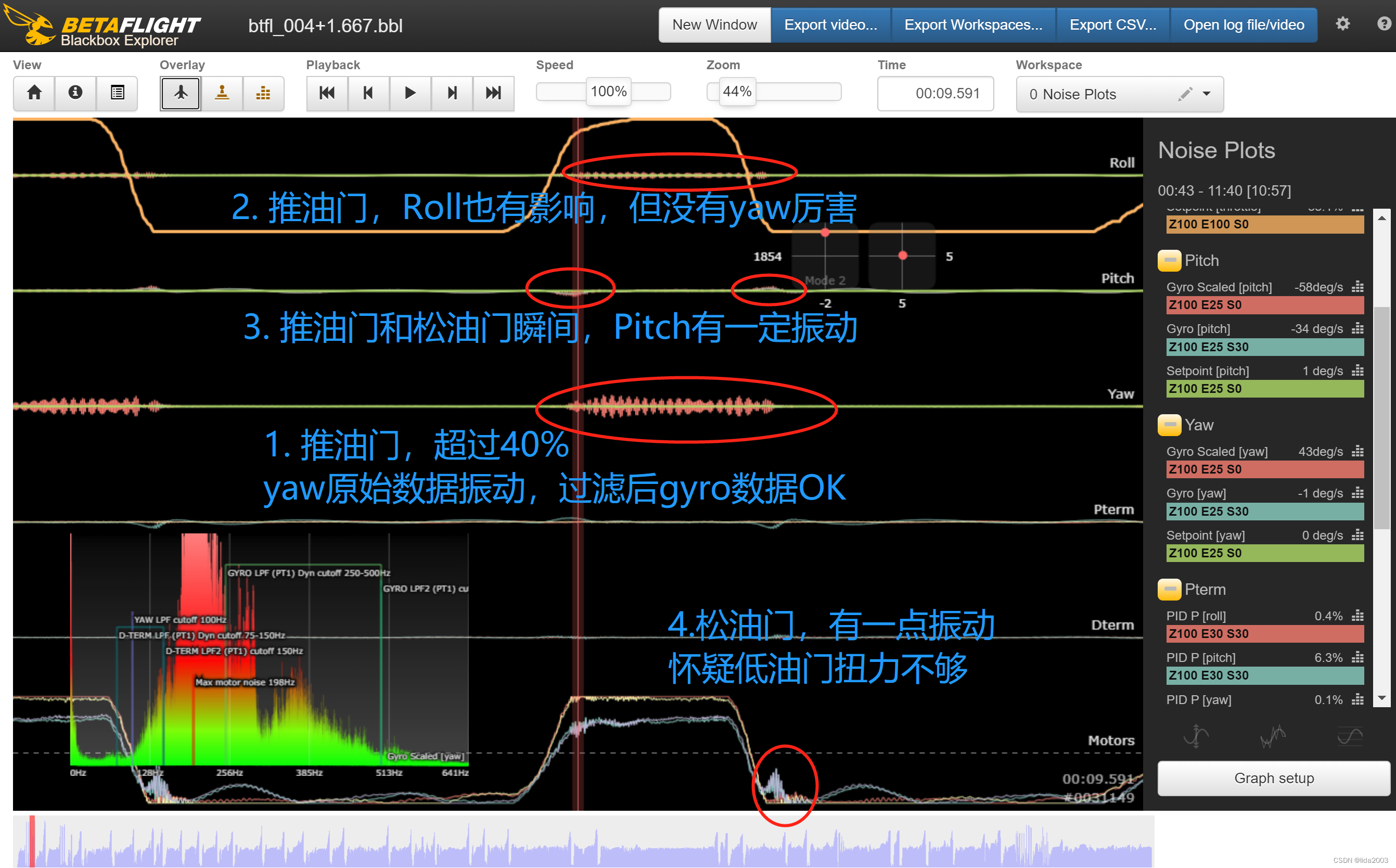
基于BetaFlight Mark4 H7BMI27 Vibration&Oscillation Tracking 1.1 数据分析:
- 加油门:yaw/roll/pitch出现不同程度来自电机的振动影响
- 松油门:前面两个电机振动明显(前滚翻趋势+低扭力 导致电机RPM转速增加维持姿态稳定)
- "bounce back"状态明显好转
tracking1.0 vs tracking1.1 对比 bounce back情况
tracking1.0_pitch
tracking1.1_pitch
tracking1.0_roll
tracking1.1_roll
6. 综述
鉴于最大嫌疑:电机振动,而暂时尚无更换电机计划:调节PID得到最优解是目前最佳方案。
- 【OK】滤波已经解决了电机振动带来的gyro原始数据干扰;
- 【OK】"bounce back"现象通过“Tracking: P & I Gains”设置为1.1基本解决;
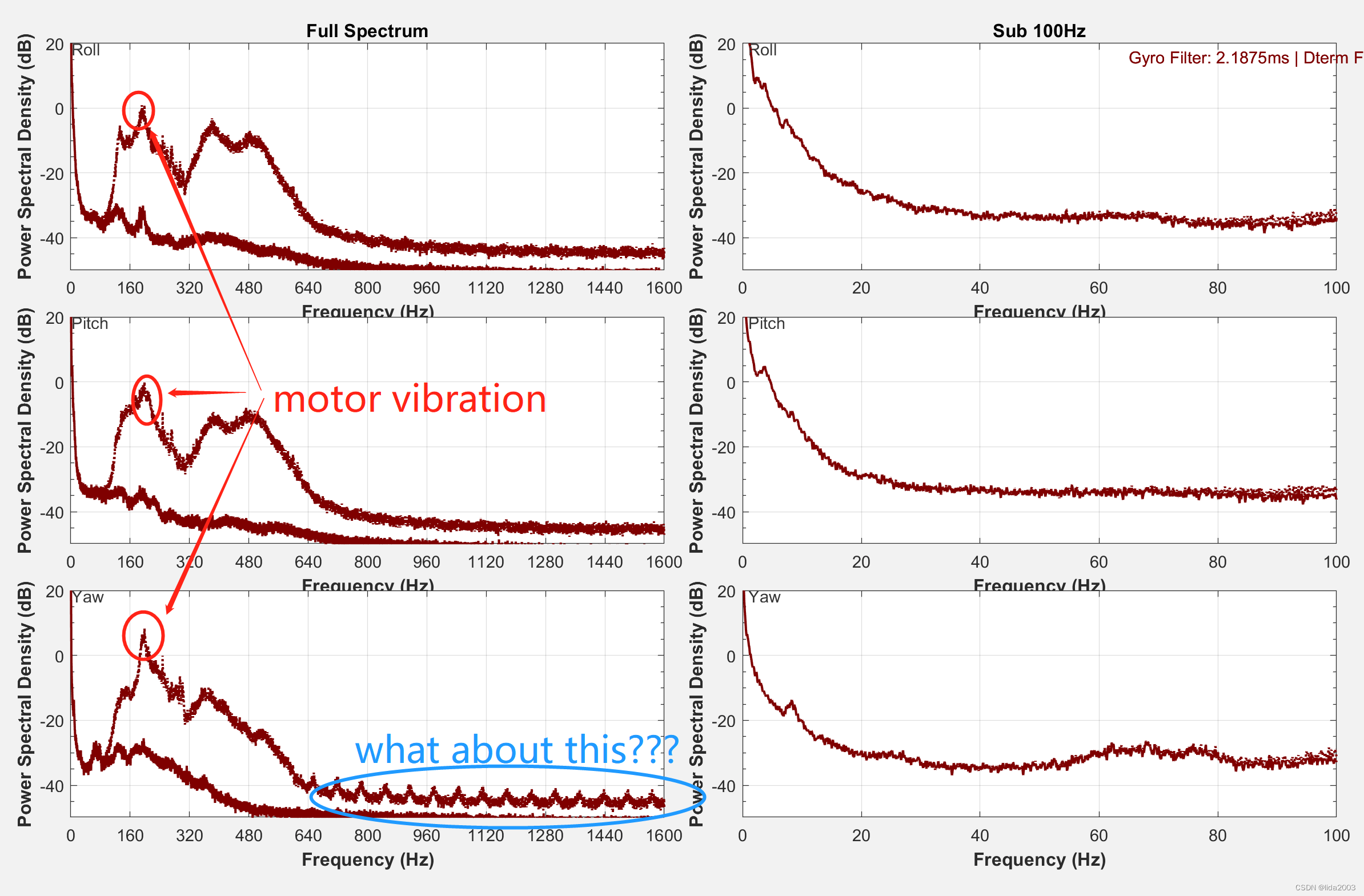
- 【待解决】存在yaw方向上等频率间隔gyro干扰是什么引起的?电机振动,机架共振?尽管低通滤波能够过滤掉。
- 【待解决】电机除了160+Hz附近一个高峰以外,还有2个峰值在300 ~ 480Hz,为什么是多个峰?
上述待解决问题详见补充的专家技术反馈信息。至此,这个妖怪声音的出处和大致原因,基本清楚明了。后续,待更换电机后再进行验证。喜欢这些类似分析和验证的小伙盘,请持续关注!我也会努力去寻找rootcause。
Quick Tip - Dont confuse residual motor noise with oscillation-
注:PID的调参貌似玄学,经过一些资料介绍,其实也并非那么神秘,在实操面,大家可以看下附录里面大佬们的一些经验心得。
7. 参考资料
【1】BetaFlight Mark4之“妖怪”声音
【2】BetaFlight模块设计之二十九:滤波模块分析
8. 附录
Mid throttle oscillations? Here's why they can happen to any build and how to fi
Reason For Mid Throttle Oscillations
FIXING MID THROTTLE OSCILLATIONS!
Betaflight 4.2 Low Throttle Instability How To Fix
How to Tune Drift | Wobble & help Throbbles --- i-Term Tuning
SOLVING 7" Oscillations / Wobbles | 7" Tuning Tips
9. 补充:存在yaw方向上等频率间隔gyro干扰是什么引起的?电机振动,机架共振?
咨询了一些网上的大佬,反馈信息整理如下:
- 300 ~ 450 Hz在yaw方向上等频率间隔低于-40dB的峰值可能是FFT(快速傅里叶)转换,且其峰值很低(低于-40dB),因此基本上没有什么影响。
- 这个锯齿波型的峰值有点像回声,而且峰值不高,LPF(低通滤波)能很好的过滤掉这块内容。
总的来说,这个锯齿波可能是系统带来的,但是不用担心,滤波系统能将这个噪声屏蔽过滤掉。
10. 补充:电机除了160+Hz附近一个高峰以外,还有2个峰值在300 ~ 480Hz,为什么是多个峰?
这里专家的反馈是:除非是稳定的悬停,否则电机将改变转速,因此与电机相关的振动将填充在宽频率范围内的频谱中,主要峰值位于特定飞行的电机转速附近。通常,对于三叶片,主要振动来自与您看到的峰值一致的1次和3次谐波。
Unless it’s a steady hover the motors will be changing RPM and so the motor-related vibration will fill in the spectrum across a wide range of freqs with predominant peaks around where the motor rpm is for that particular flight. Typically for tri-blades the dominant vibration is from the 1st and 3rd harmonics consistent with the peaks you’re seeing