BetaFlight之穿越机设置
《穿越机》属于高竞速,续航时间较短的小型无人机,通常玩家们喜欢自己买配件组装,穿越机的最高时速可达到每小时120km/h-170km/h,有些达人可让无人机的速度更快。缺点在于时速太快稍不留神就容易炸机。
随着无人机的发展,无人机领域已经得到了飞速的发展,穿越机就算是无人机家族中一个特立独行的款式,有些会玩的玩家通常都会自己买配件进行组装,(就像当年的四驱车一样),他们会自己组建战队,拍摄自己的飞行视频,追逐各种竞速比赛,其中在 各种穿越机比赛获得冠军就成为了国内众多玩家的追求。
折叠编辑本段机架:
机架分为折叠和非折叠两种,不同的材质有不同的优缺点,常见的框架有炭纤板配金属外壳。
折叠的优点主要是方便携带,在空中撞击后可以起到卸力的作用,缺点主要是安装麻烦,价格偏贵。
非折叠机架的优缺点正好与之相反。
折叠编辑本段动力:
动力配置越高飞得就越快,同时电池消耗与之成正比的。
折叠编辑本段飞控:
飞控的作用是控制机身在空中保持平衡,飞手不用分出精力去控制机身平衡。有些高级飞手舍弃飞控自己控制机身平衡,这增加了不小的难度系数。
飞控分为商业飞控和开源飞控,商业飞控有QQ飞控、NAZA飞控等,开源飞控有APM飞控、PIX飞控、F4飞控、CC3D飞控等。
飞控的区别主要体现在运算效率和飞行模式方面。飞控输入端越少,CPU对端口扫描用时就越少,响应速度就越快,更能保证穿越机飞行姿态快速变化的要求。对飞控固件的飞行姿态算法进行简化,CPU的计算速度也会越快。飞行模式,包括简单模式、稳定模式、定高模式、悬停模式、返航模式、一键起飞模式、跟随模式、指导模式、自动模式等。
折叠编辑本段FPV设备:
可以解释为第一人称视角 其中包括(摄像头、图传发射器、天线、图传接收器、显示器或视频眼镜)
OSD:显示飞机的电量,经纬度信号强度和方位,这个可根据喜好来选择。
本人组装穿越机,真的非常好飞,方便携带,一个书包即可!



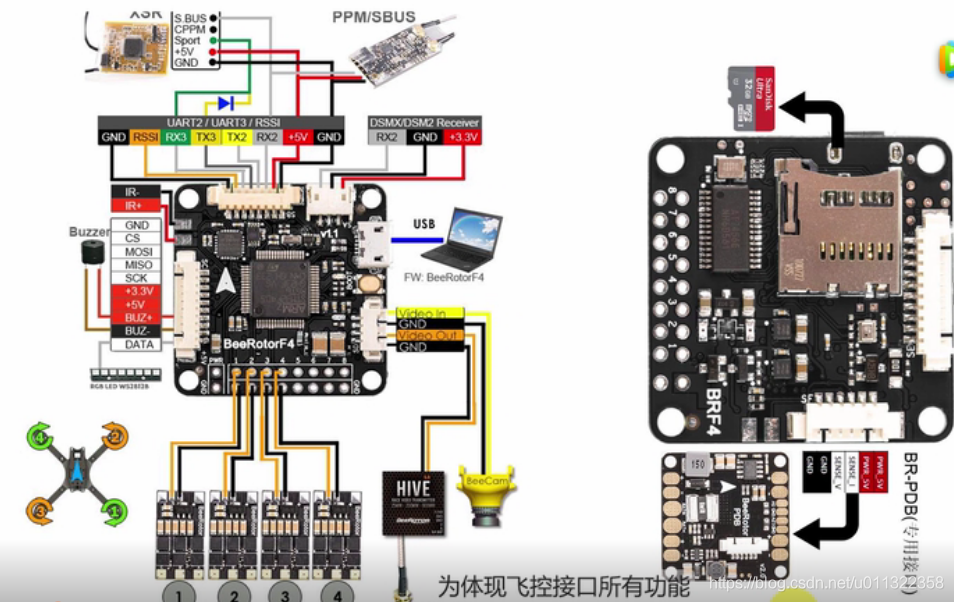
一、接线图
各个厂家的接口不一样,顺序也有所不同,只要会焊接,这都不是问题。
在这里插入图片描述
二、驱动安装
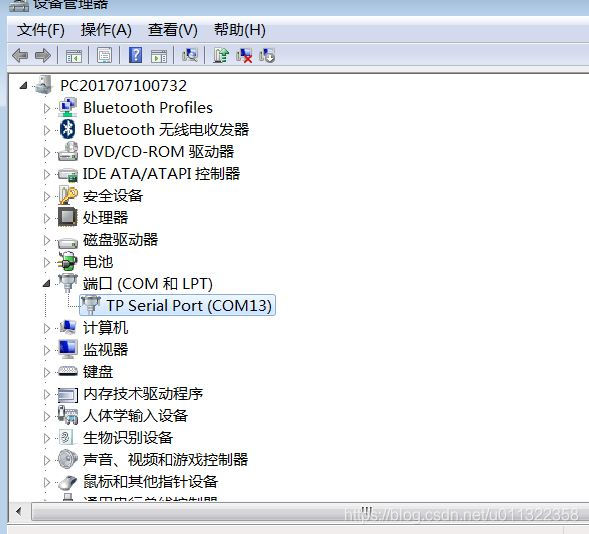
1:第一步,按住飞控的BOOT键不放,同时使用安卓USB线与电脑连接。此时飞控的led指示灯长亮。打开电脑的设备管理器,查看驱动程序是否自动在线加载完成。若有感叹号,请在线自动搜索驱动并自行安装。安装完成,对应的硬件设备如图所示:
一般会安装成功,如果安装成功,最简单的方法,下载驱动精灵,自动安装,win7安装完后要禁止驱动器签名启动。

三、连接betaflight 3.2.2 地面站软件,刷写固件
刷写固件要断开连接,选择好COM口,波特率

选择固件刷写项,设置好对应的参数:
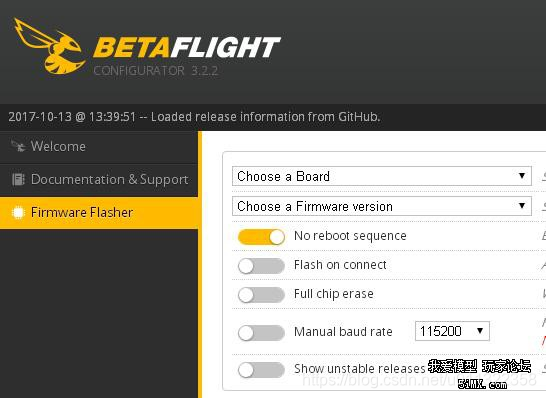
点击 Flash Flrmware 开始把固件刷写入飞控,刷写过程会显示:

四、刷写完,连接,参数设置
建议将飞控放水平,点击Callbrate Accelerometer进行飞控的水平校准。校准时间很快,大概就10秒。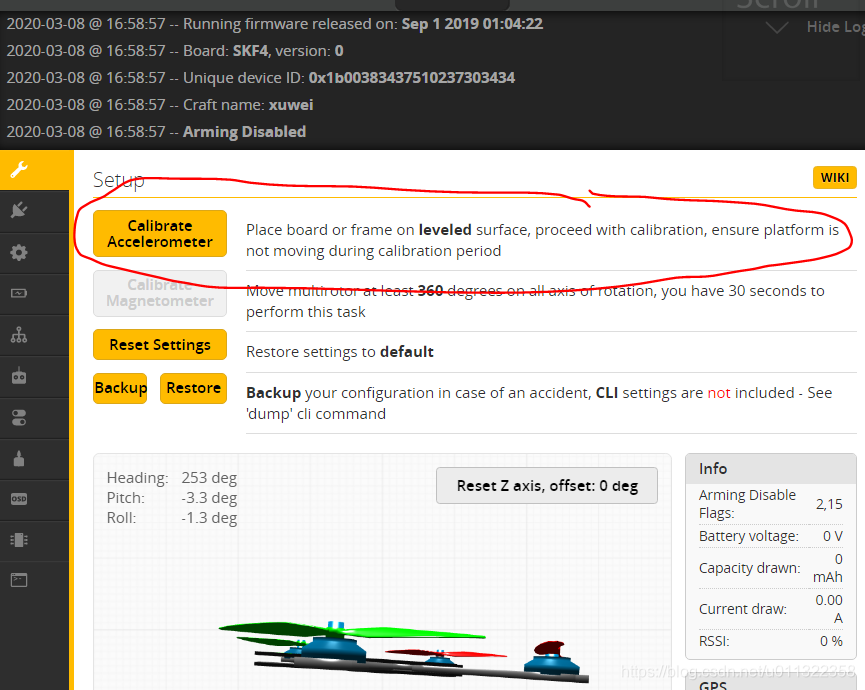
设置接收机的连接端口。一般使用uart3端口连接遥控器的接收机(SBUS接收机)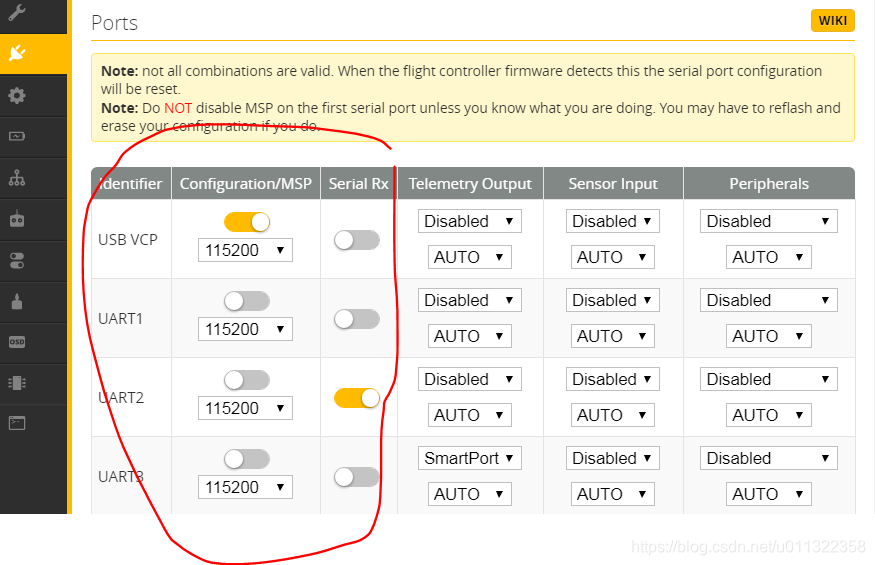 设置完记得点击右下角的Save and Reboot保存,飞控会重启一次。
设置完记得点击右下角的Save and Reboot保存,飞控会重启一次。
进入基础设置选项,首先选择电调支持的类型,这个需要对自己能支持哪些要有了解,bls电调主要使用MULTISHOT 第三个选项 Disarm motors……选项的勾选是选择开关解锁电机。即在模式选项里的ARM解锁模式,使用一个3端开关作为解锁。这个设置也是出于安全考虑,一直使用至今。
第三个选项 Disarm motors……选项的勾选是选择开关解锁电机。即在模式选项里的ARM解锁模式,使用一个3端开关作为解锁。这个设置也是出于安全考虑,一直使用至今。
接着设置飞控的传感器频率,默认陀螺仪频率为8K PID刷新频率为2K。可以勾选:Enable gyro 32khz……这个选项,飞控会将陀螺仪与PID的刷新频率超频至32Khz。这个选项看飞控本身的体质决定了,并非必选。 下面有3个选项,
下面有3个选项,
第一个是加速计开关。飞自稳和半自稳是必须打开的,betaflight 3.2.0固件加入了防炸机模式(该功能请查找论坛其他相关帖),也需要打开加速计。
第二个是气压计开关。直接关掉,不要问有气压计能不能帮助定高之类的话……穿越机要定高就没乐趣了……
第三个是磁罗盘开关。直接关掉,飞控没有。
选择遥控接收机的模式: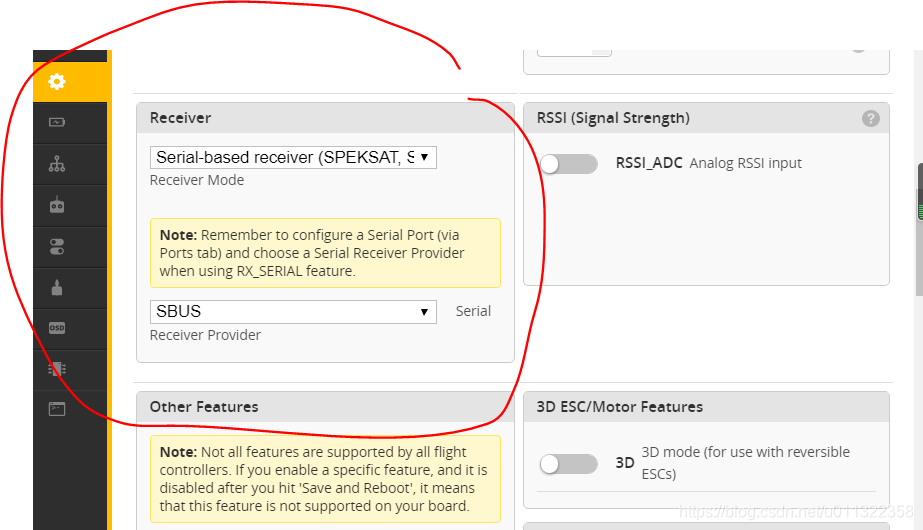
设置飞控默认打开的项目:勾选 OSD 及 DYNAMI_FILTER 选项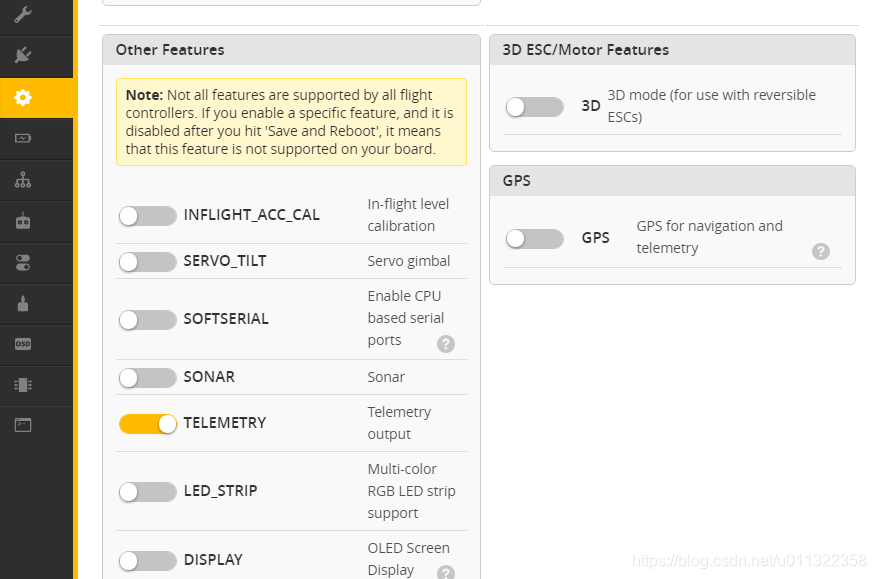
OSD自然是使用内置的OSD显示,DYNAMI_FILTER 就是betaflight 3.2.0固件最新的动态滤波功能(该功能具体用处请搜索论坛相关帖)
至此基础设置选项已经设置完成,点击右下角的Save and Reboot保存,飞控会重启一次。
进入PID设置界面,betaflight 3.2.0 的默认参数其实已经能满足新手的基本飞行了,毕竟每台机的参数不尽相同。
而动态滤波功能也是在这里设定,根据论坛相关帖的教程,直接设置如下。设置完记得点击save保存哦。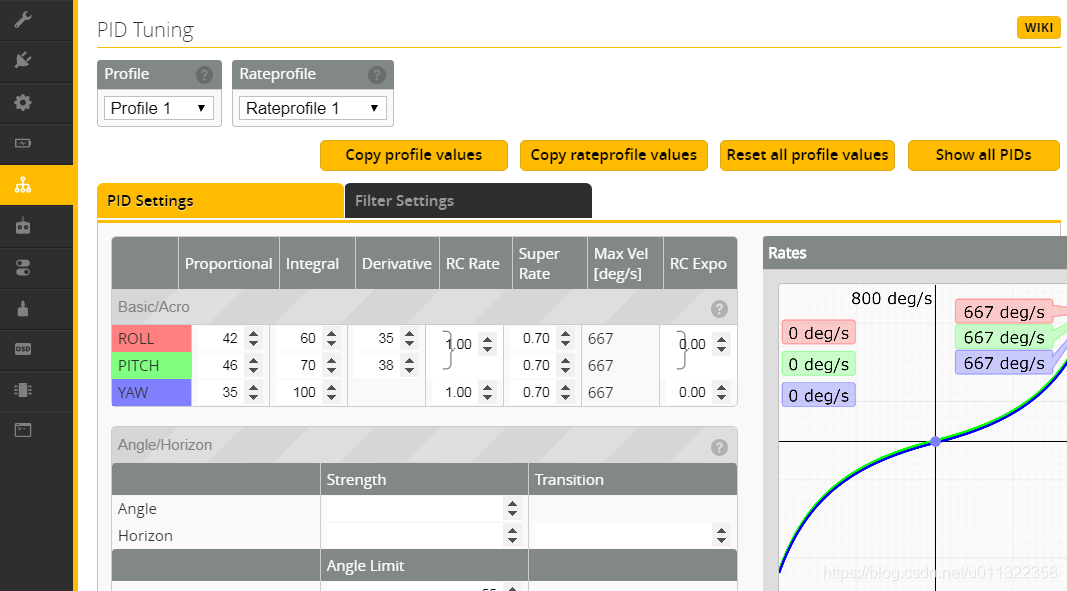
进入接收机通道的设置界面。这里特别要说明一下,部分刷完固件后没有细看,导致设置完无法解锁电机。
大多数遥控的油门通道默认最低点是1100左右,我推荐请把遥控的油门通道最低点设置低于1000。设置为995~997都可以。本文所有的教程都以这个为标准。
请给飞控上电,动一下遥控的油门值,进入遥控通道行程菜单进行设置。看着电脑显示的值将油门最低值设置为995.这点非常重要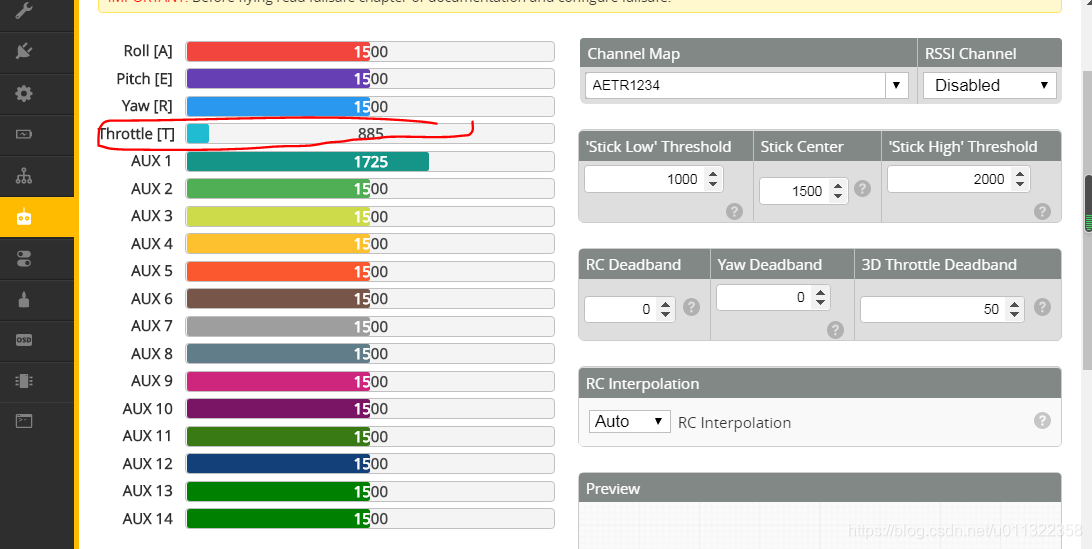
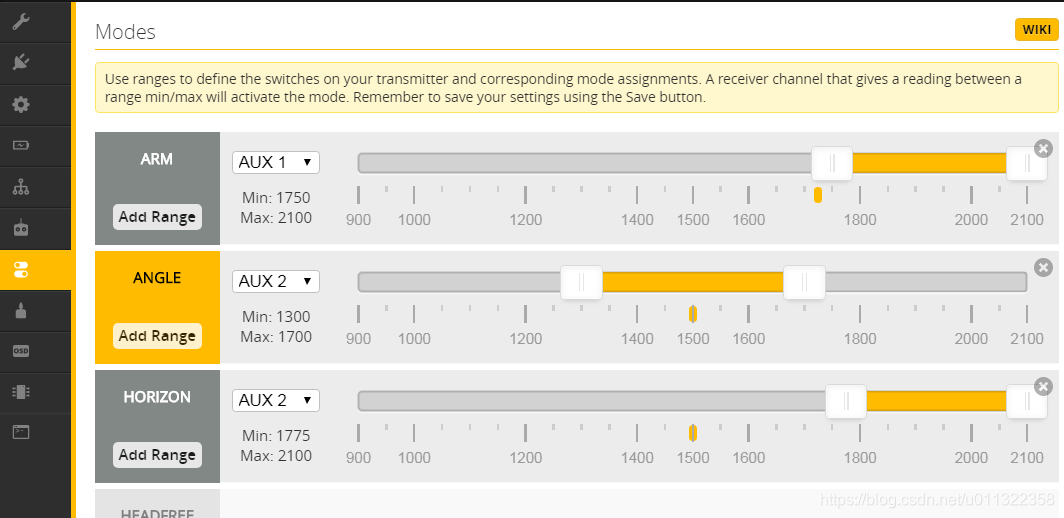
进入模式设置界面。
ARM就是开关解锁。 点击对应模式的 Add Range 新增。AUX1就是飞控的第五通道,我习惯是第五通道设置为3端开关,并鼠标拖动两端值,这个值就是第五通道的行程值。
ANGLE是全自稳模式,自从玩穿越开始就没使用过这个模式,使用感受无法描述。
HORIZON是半自稳模式,适合有一丁点遥控使用基础的新手选择,同样是用AUX1 遥控的第五通道来激活,设置这个模式在第五通道的行程启动范围。
注意看,ARM是解锁,HORIZON是半自稳,那么手动模式在哪呢?手动模式,只要解锁了,不是自稳或者半自稳,就是手动模式了。不要再问手动模式在哪。
 AIR MODE模式也叫空中模式,选择这个模式,就算油门最低,电机也不会刹车或者停转,而是以怠速进行工作。这样的好处是在进行大机动飞行过程中油门动作大可以避免意外电机刹车而突然丢姿态导致炸机。飞手动模式一定程度后建议使用AIR模式。建议AIR模式的工作范围设定在手动模式范围。模式设置完,记得点击右下角的保存哦!
AIR MODE模式也叫空中模式,选择这个模式,就算油门最低,电机也不会刹车或者停转,而是以怠速进行工作。这样的好处是在进行大机动飞行过程中油门动作大可以避免意外电机刹车而突然丢姿态导致炸机。飞手动模式一定程度后建议使用AIR模式。建议AIR模式的工作范围设定在手动模式范围。模式设置完,记得点击右下角的保存哦!
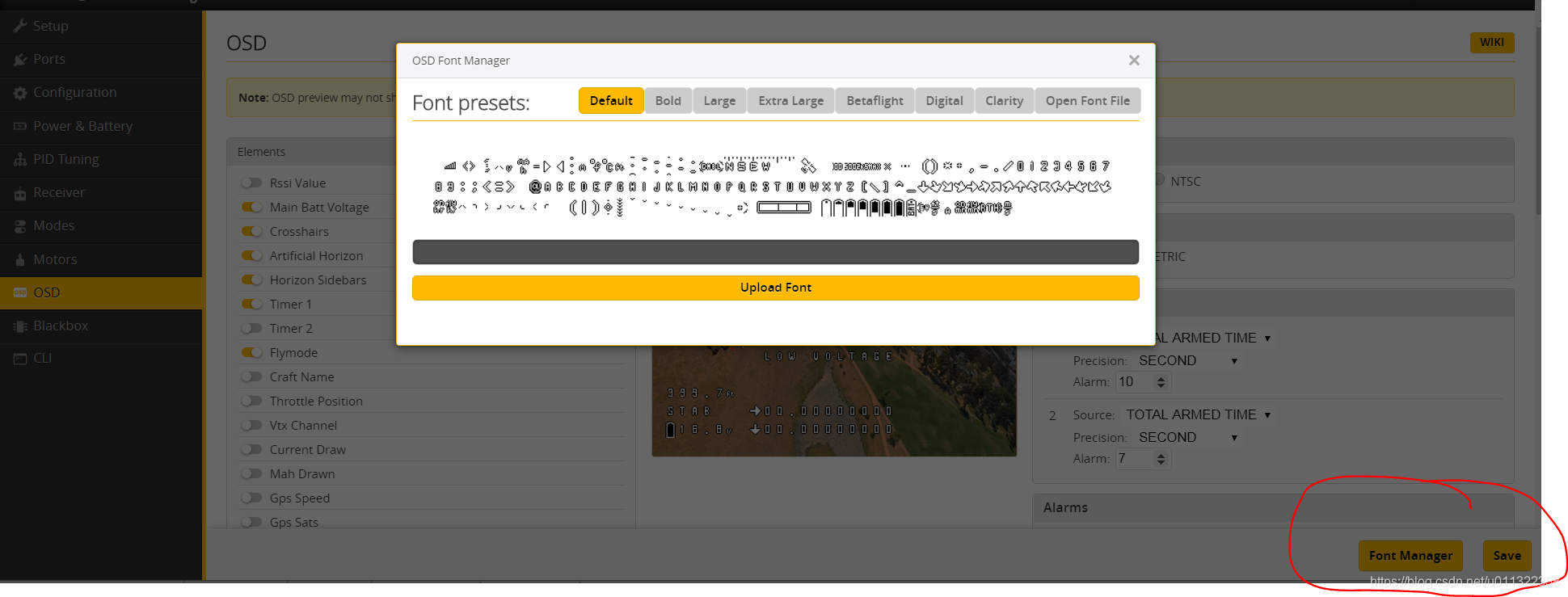
OSD界面设置:
个人习惯只看OSD信息的几个数据:电池电压,RSSI遥控信号强度,飞行时间(油门非0状态),通电时间,飞行模式,油门值。所以我习惯只勾选如图的几个选项。
同时中间的屏幕模拟界面也会同步更新显示。选项调节完后,可以直接鼠标点击拖动对应的字块到你想显示在屏幕的位置,例如我就是喜欢把电压值放在屏幕的中下位置,这样飞行时候比较直观方便的看到实时电压状态。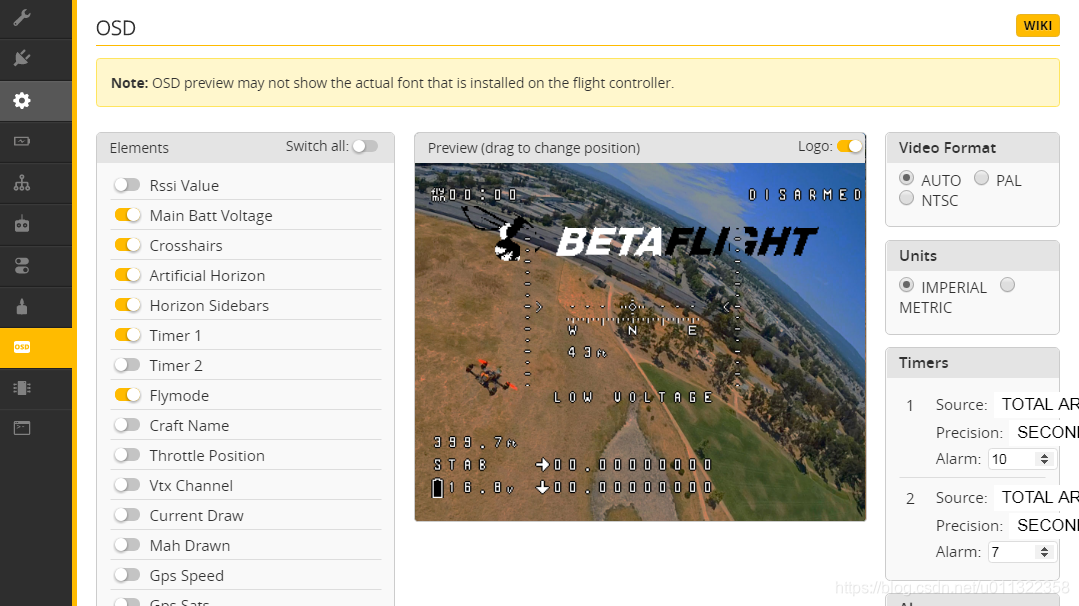
扩展参数设置,重要,请仔细看: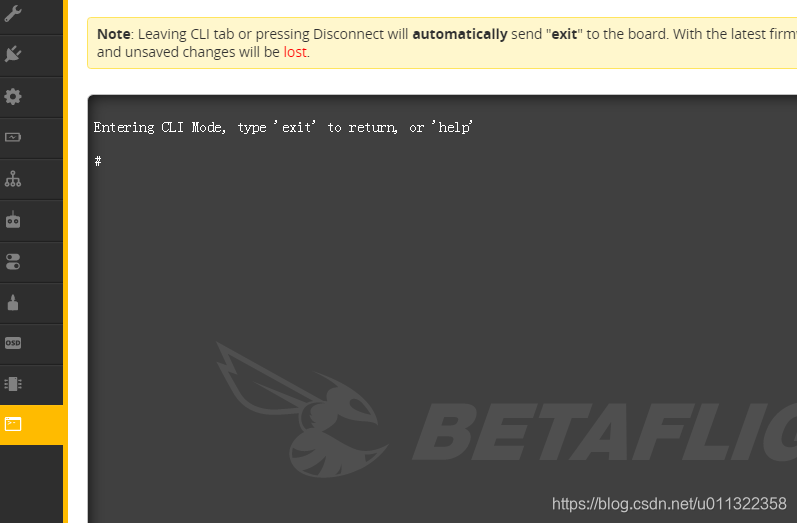
进入命令行,用命令来锁定飞控的最低油门及最高油门,和开机防炸机模式。
输入 dump 回车
输入 set min_check = 1000 回车,确认校验最低油门值1000
输入 set max_check = 2000 回车,确认校验最高油门值2000
输入 set crash_recovery = on回车,确认防炸机模式开启
输入 save 回车,保存重启飞控
电调油门行程校准:
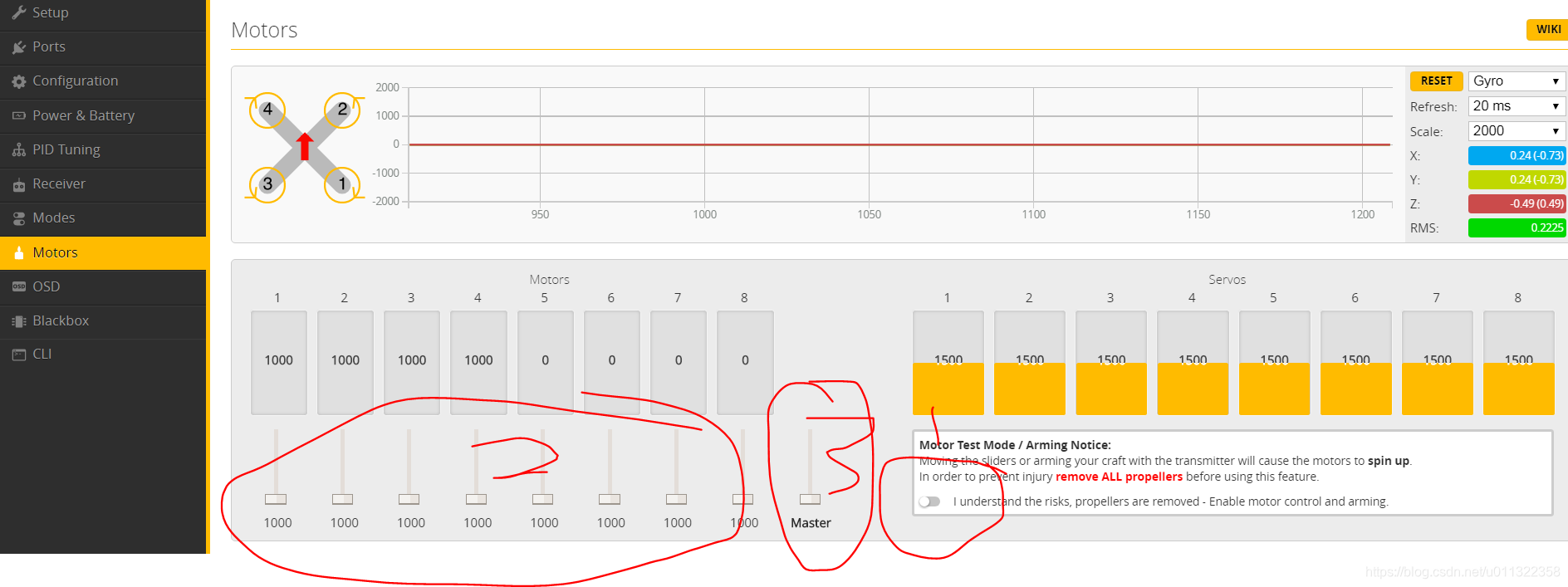
最后就是电机电调的油门行程校准,此时先去掉动力电池,去掉桨。
勾选 I understand…………
将Master控制推到最高,上动力电,电调开始唱歌,唱歌结束,把控制拉到最低,电调确认最低油门值,最终确认电调自检完成。OK,电调电机的油门行程校准就完成了。
至此,betaflight OMNIBUS F4飞控基本设置完毕,再次检查电机的转向,电调接入飞控的排序。一切OK,装桨上天。
