目录
1 SLAM在导航定位的作用
如下图所示,SLAM算法在导航和定位中起到了枢纽的作用:
用:

2 VINS - FUSION介绍
中间的框(Sect. IV)是传感器的测量:视觉特征的提取(FAST角点、用光流法进行跟踪匹配)、IMU预积分。
左面的初始化(Sect. Ⅴ)就是将视觉-惯性进行对齐的一个过程,用一段时间内视觉的观测根据匹配关系计算运动,累计到一定程度(20-30帧)会对这段时间的运动和匹配结果进行全局BA算出一个更加准确的视觉里程计的结果。得到这个视觉里程计的结果后将IMU预积分的结果和视觉里程计的结果进行对齐,求解坐标系的外参、系统尺度及重力加速度。
初始化之后,进入了滑动窗口紧耦合优化求解的过程。同时也会进行回环检测。




3 激光SLAM简单介绍
代表性的激光SLAM:
激光点云运动畸变:由于激光雷达旋转一圈才能得到一帧完整的点云,因此激光雷达下每个点都是不同时间下测量的,这在机器人静止的时候是没有问题的。
但是当机器人运动的时候问题就显现出来了,激光雷达扫描的起始点和结束点不重合。使得点云发生了畸变,会使物体发生拉伸变形。







4 多模态融合SLAM算法
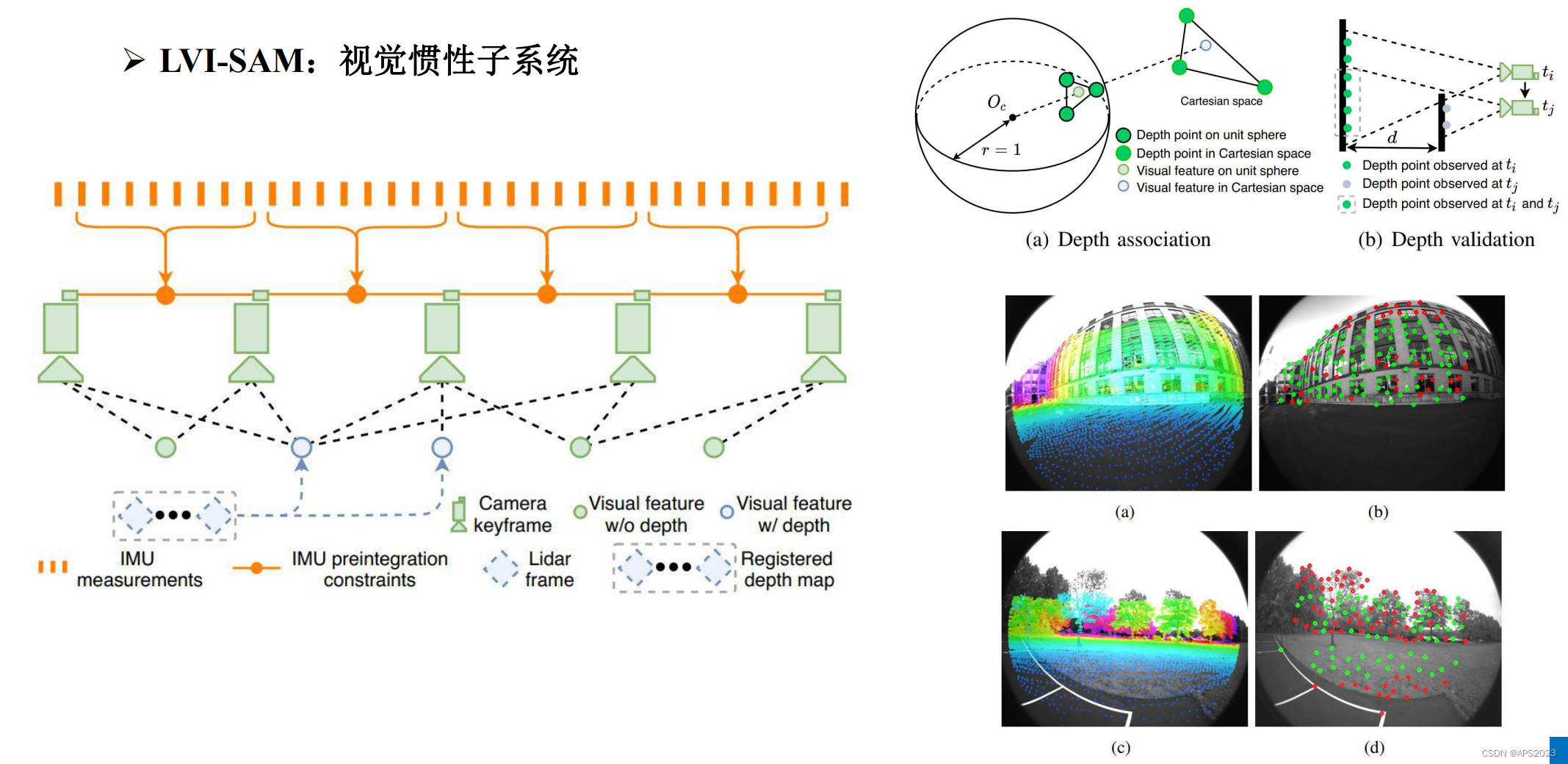
LVI-SAM简介:由视觉惯性子系统和激光惯性子系统构成。
由于激光雷达可以测量到环境的几何信息,它和IMU融合可以快速的进行初始化。我们可以用激光惯性里程计输出的结果辅助视觉SLAM进行初始化,让其更快更准确的进行初始化,激光点云我们可以借助外参投影到图象中去辅助视觉特征进行深度提取最后融合激光-视觉-IMU的信息进行联合因子图优化。