目录
1.2.1 检测有没有外部通知的回环信息detectLoopClosureExternal
1.2.2 检测内部回环 detectLoopClosureDistance
1.2.3 取出回环候选帧的点云 loopFindNearKeyframes
1.3 发布可视化回环信息 /lio_sam/mapping/loop_closure_constraints
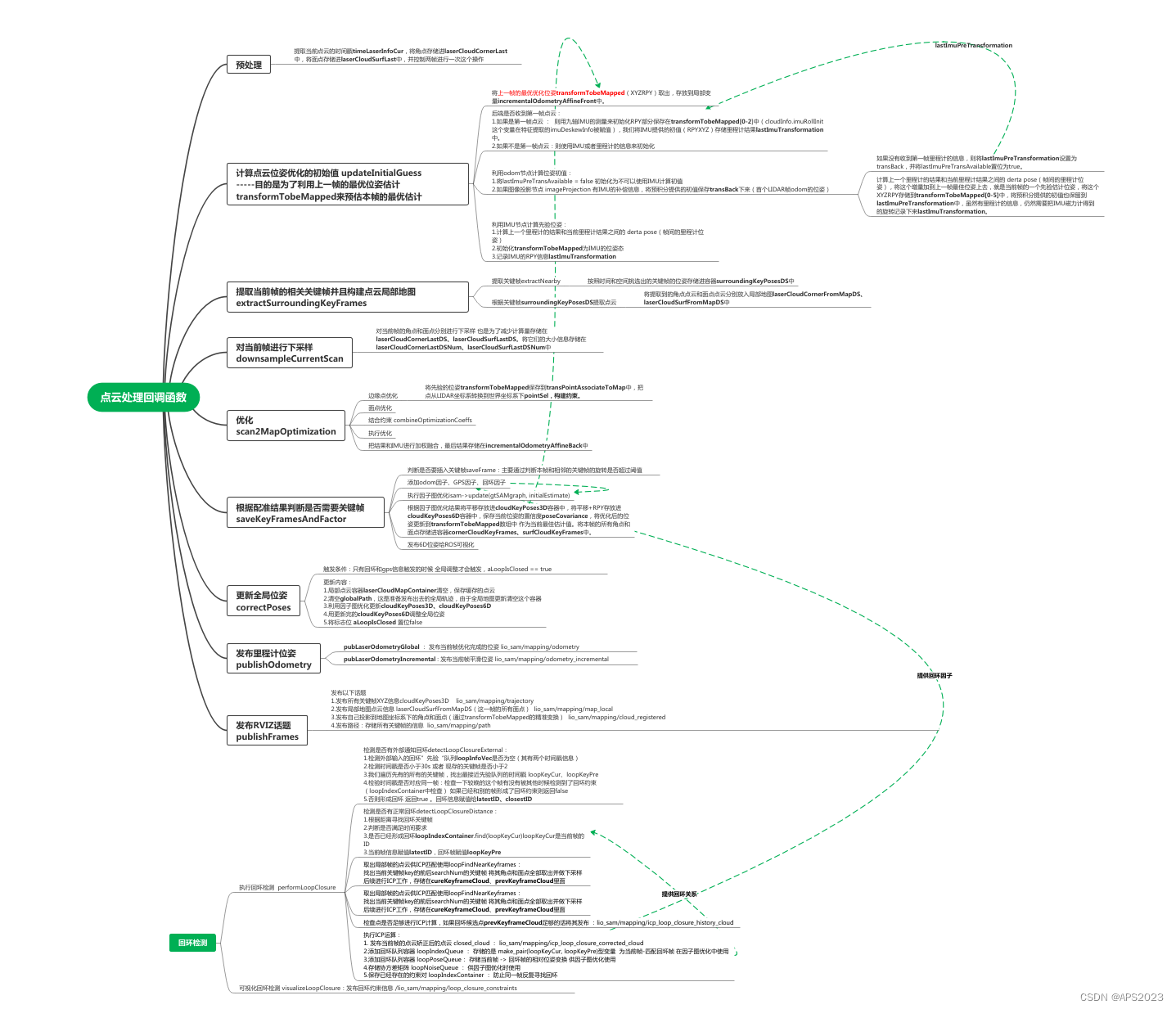
0 流程图
1 闭环检测线程分析
1.1 闭环检测主进程
程序通过这行代码进入闭环检测主线程:
// 回环检测线程 std::thread loopthread(&mapOptimization::loopClosureThread, &MO);回环检测主要分为两个部分:检测回环、回环可视化。如果只是作为一个里程计则不需要回环。
void loopClosureThread() { // 如果只作为一个独立的里程计 (如果不进行回环检测 则退出这个线程) if (loopClosureEnableFlag == false) return; // 设置回环检测的速率 1HZ ros::Rate rate(loopClosureFrequency); while (ros::ok()) { // 执行完一段sleep一段时间 否则该线程占用CPU特别高 rate.sleep(); // 执行回环检测 performLoopClosure(); // 可视化回环检测 visualizeLoopClosure(); } }
1.2 执行回环检测
1.2.1 检测有没有外部通知的回环信息detectLoopClosureExternal
bool detectLoopClosureExternal(int *latestID, int *closestID) { // this function is not used yet, please ignore it int loopKeyCur = -1; int loopKeyPre = -1; std::lock_guard<std::mutex> lock(mtxLoopInfo); // 外部的先验回环信息队列 if (loopInfoVec.empty()) return false; // 取出回环信息 这里把时间戳作为回环信息 double loopTimeCur = loopInfoVec.front().data[0]; double loopTimePre = loopInfoVec.front().data[1]; loopInfoVec.pop_front(); // 如过两个回环帧之间的时间差小于30s就算了 if (abs(loopTimeCur - loopTimePre) < historyKeyframeSearchTimeDiff) return false; int cloudSize = copy_cloudKeyPoses6D->size(); // 如果现存的关键帧小于2那也没有意义 if (cloudSize < 2) return false; // latest key loopKeyCur = cloudSize - 1; // 遍历所有的关键帧 找到离后面一个时间戳更接近关键帧的ID for (int i = cloudSize - 1; i >= 0; --i) { if (copy_cloudKeyPoses6D->points[i].time >= loopTimeCur) loopKeyCur = round(copy_cloudKeyPoses6D->points[i].intensity); else break; } // previous key loopKeyPre = 0; // 找到距离前时间戳更近的关键帧ID for (int i = 0; i < cloudSize; ++i) { if (copy_cloudKeyPoses6D->points[i].time <= loopTimePre) loopKeyPre = round(copy_cloudKeyPoses6D->points[i].intensity); else break; } // 如果两个是同一关键帧 就没什么意思了 if (loopKeyCur == loopKeyPre) return false; // 检查一下较晚的这个帧有没有被其他时候检测到了回环约束 如果已经和别的帧形成了回环约束 auto it = loopIndexContainer.find(loopKeyCur); if (it != loopIndexContainer.end()) return false; // 两个帧的索引输出 *latestID = loopKeyCur; *closestID = loopKeyPre; return true; }检测是否有外部通知回环detectLoopClosureExternal步骤如下:
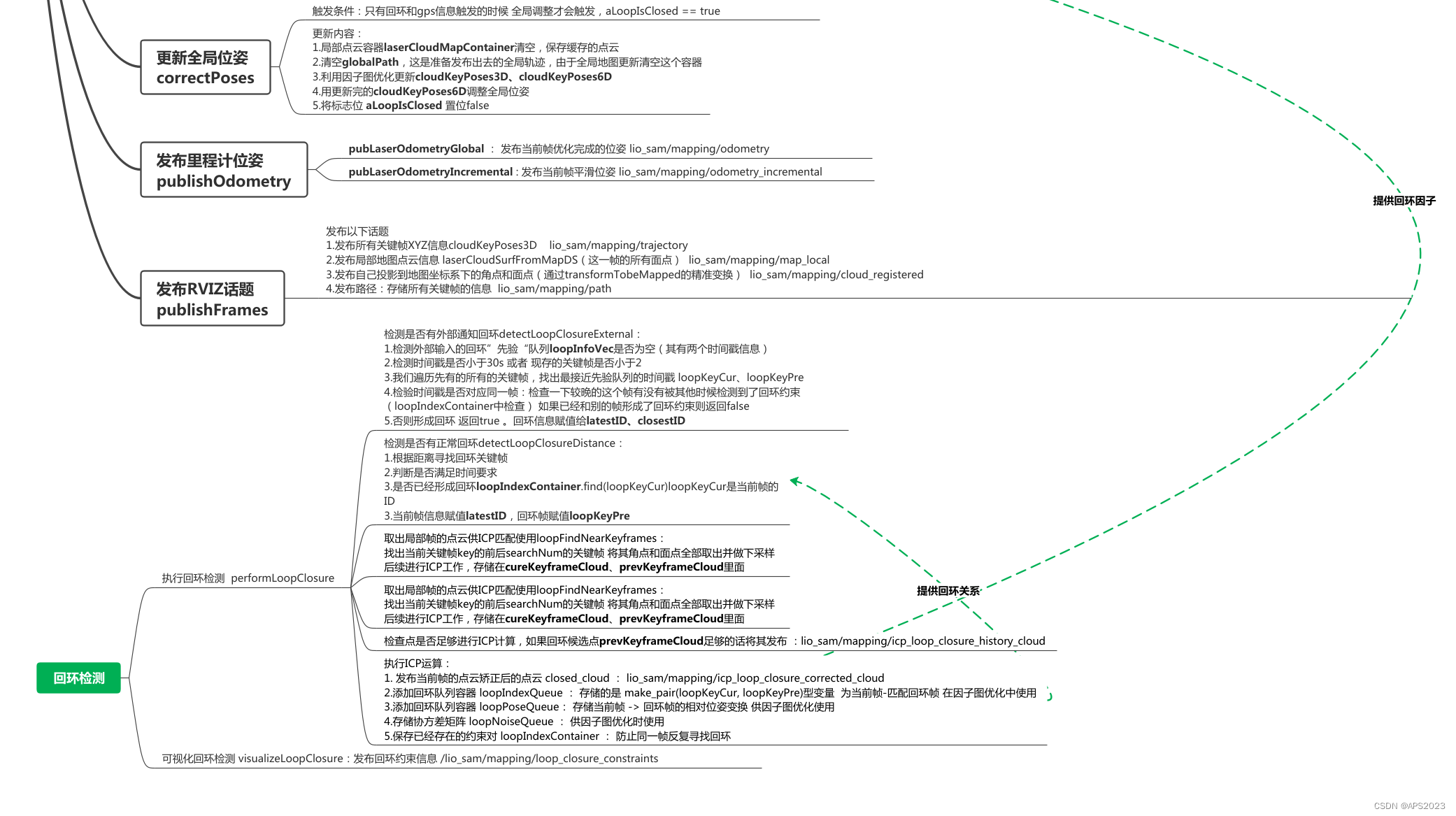
1.检测外部输入的回环”先验“队列loopInfoVec是否为空(其有两个时间戳信息)
2.检测时间戳是否小于30s 或者 现存的关键帧是否小于2
3.我们遍历先有的所有的关键帧,找出最接近先验队列的时间戳 loopKeyCur、loopKeyPre
4.检验时间戳是否对应同一帧:检查一下较晚的这个帧有没有被其他时候检测到了回环约束(loopIndexContainer中检查) 如果已经和别的帧形成了回环约束则返回false
5.否则形成回环 返回true 。回环信息赋值给latestID、closestID
1.2.2 检测内部回环 detectLoopClosureDistance
bool detectLoopClosureDistance(int *latestID, int *closestID) { // 检测最新帧是否和其他帧形成回环 所以后面一帧的ID是最后一个关键帧 // copy_cloudKeyPoses3D 拷贝的 cloudKeyPoses3D int loopKeyCur = copy_cloudKeyPoses3D->size() - 1; int loopKeyPre = -1; // check loop constraint added before // 检查一下当前帧是否和别的帧形成了回环 如果有就算了 auto it = loopIndexContainer.find(loopKeyCur); if (it != loopIndexContainer.end()) return false; // find the closest history key frame std::vector<int> pointSearchIndLoop; std::vector<float> pointSearchSqDisLoop; // 把只包含关键帧位姿XYZ信息的点云填充kdtree kdtreeHistoryKeyPoses->setInputCloud(copy_cloudKeyPoses3D); // 根据最后一个关键帧的平移信息 寻找距离它一定距离内的其他关键帧 historyKeyframeSearchRadius = 15 kdtreeHistoryKeyPoses->radiusSearch(copy_cloudKeyPoses3D->back(), historyKeyframeSearchRadius, pointSearchIndLoop, pointSearchSqDisLoop, 0); // 遍历当前候选帧 for (int i = 0; i < (int)pointSearchIndLoop.size(); ++i) { int id = pointSearchIndLoop[i]; // 必须满足时间上超过一定阈值 才认为是一个有效的回环 30s // timeLaserInfoCur是当前点云帧的时间戳 if (abs(copy_cloudKeyPoses6D->points[id].time - timeLaserInfoCur) > historyKeyframeSearchTimeDiff) { // 此时推出了 loopKeyPre = id; break; } } // 如果没有找到回环或者找到自己身上了 则认为此次回环失败 if (loopKeyPre == -1 || loopKeyCur == loopKeyPre) return false; // 当前帧 *latestID = loopKeyCur; // 回环候选帧 *closestID = loopKeyPre; return true; }检测是否有正常回环detectLoopClosureDistance:
1.根据距离寻找回环关键帧
2.判断是否满足时间要求
3.是否已经形成回环loopIndexContainer.find(loopKeyCur)loopKeyCur是当前帧的ID
3.当前帧信息赋值latestID,回环帧赋值loopKeyPre
1.2.3 取出回环候选帧的点云 loopFindNearKeyframes
找出当前关键帧key的前后searchNum的关键帧 将其角点和面点全部取出并做下采样后续进行ICP工作。
void loopFindNearKeyframes(pcl::PointCloud<PointType>::Ptr& nearKeyframes, const int& key, const int& searchNum) { // extract near keyframes nearKeyframes->clear(); // 关键帧数量 int cloudSize = copy_cloudKeyPoses6D->size(); // searchNum为搜索范围 for (int i = -searchNum; i <= searchNum; ++i) { // 找到这个idx int keyNear = key + i; if (keyNear < 0 || keyNear >= cloudSize ) continue; // 否则把对应角点和面点的点云转换到世界坐标系下面去 // cornerCloudKeyFrames 在saveKeyFramesAndFactor中赋值 是vector类型 存储着所有关键帧的角点信息 *nearKeyframes += *transformPointCloud(cornerCloudKeyFrames[keyNear], ©_cloudKeyPoses6D->points[keyNear]); *nearKeyframes += *tr ansformPointCloud(surfCloudKeyFrames[keyNear], ©_cloudKeyPoses6D->points[keyNear]); } if (nearKeyframes->empty()) return; // downsample near keyframes // 把点云下采样 pcl::PointCloud<PointType>::Ptr cloud_temp(new pcl::PointCloud<PointType>()); downSizeFilterICP.setInputCloud(nearKeyframes); downSizeFilterICP.filter(*cloud_temp); *nearKeyframes = *cloud_temp; }取出的点云存放在nearKeyframes中。
// extract cloud // 检测出回环之后开始计算两帧的位姿变换 pcl::PointCloud<PointType>::Ptr cureKeyframeCloud(new pcl::PointCloud<PointType>()); pcl::PointCloud<PointType>::Ptr prevKeyframeCloud(new pcl::PointCloud<PointType>()); { // 当前帧就把自己取了出来 loopFindNearKeyframes(cureKeyframeCloud, loopKeyCur, 0); // 稍早一点的就把自己和周围一些点云取出来 也就是构成一个帧到局部地图的一个匹配信息 loopFindNearKeyframes(prevKeyframeCloud, loopKeyPre, historyKeyframeSearchNum); // 如果点云数目太少就算了 if (cureKeyframeCloud->size() < 300 || prevKeyframeCloud->size() < 1000) return; lio_sam/mapping/icp_loop_closure_history_cloud prevKeyframeCloud存放的是当前帧回环候选帧及周围的点云 if (pubHistoryKeyFrames.getNumSubscribers() != 0) // 把局部地图发布出去的点云供rviz可视化使用 publishCloud(pubHistoryKeyFrames, prevKeyframeCloud, timeLaserInfoStamp, odometryFrame);检查点是否足够进行ICP计算,如果回环候选点prevKeyframeCloud足够的话将其发布 :lio_sam/mapping/icp_loop_closure_history_cloud
1.2.4 执行ICP计算位姿变换 ICP solver
这段代码使用了点云库(Point Cloud Library,PCL)中的IterativeClosestPoint类来执行点云配准。下面是对各个函数的解释:
setMaxCorrespondenceDistance函数用于设置最大对应距离,即两个点之间允许的最大距离。在这里,距离设置为historyKeyframeSearchRadius的两倍。
setMaximumIterations函数设置迭代的最大次数,这里设置为100次。
setTransformationEpsilon函数设置变换的收敛阈值。当两次变换之间的差异小于该阈值时,认为算法已经收敛。这里的阈值设置为1e-6。
setEuclideanFitnessEpsilon函数设置欧式适配度的收敛阈值。欧式适配度是指点云配准前后的均方根误差(Root Mean Square Error,RMSE),当误差小于该阈值时,认为算法已经收敛。这里的阈值设置为1e-6。
setRANSACIterations函数设置RANSAC算法的迭代次数。RANSAC算法用于估计初始变换矩阵,将其用作点云配准的初始猜测。在这里,迭代次数设置为0,即禁用RANSAC算法。
通过这些设置,代码为ICP配准算法提供了一些参数,以控制算法的收敛性和准确性。
创建一个名为icp的静态对象,类型为pcl::IterativeClosestPoint<PointType, PointType>// 这段代码使用了点云库(Point Cloud Library,PCL)中的IterativeClosestPoint类来执行点云配准。下面是对各个函数的解释: // setMaxCorrespondenceDistance函数用于设置最大对应距离,即两个点之间允许的最大距离。在这里,距离设置为historyKeyframeSearchRadius的两倍。 // setMaximumIterations函数设置迭代的最大次数,这里设置为100次。 // setTransformationEpsilon函数设置变换的收敛阈值。当两次变换之间的差异小于该阈值时,认为算法已经收敛。这里的阈值设置为1e-6。 // setEuclideanFitnessEpsilon函数设置欧式适配度的收敛阈值。欧式适配度是指点云配准前后的均方根误差(Root Mean Square Error,RMSE),当误差小于该阈值时,认为算法已经收敛。这里的阈值设置为1e-6。 // setRANSACIterations函数设置RANSAC算法的迭代次数。RANSAC算法用于估计初始变换矩阵,将其用作点云配准的初始猜测。在这里,迭代次数设置为0,即禁用RANSAC算法。 // 通过这些设置,代码为ICP配准算法提供了一些参数,以控制算法的收敛性和准确性。 // 创建一个名为icp的静态对象,类型为pcl::IterativeClosestPoint<PointType, PointType> static pcl::IterativeClosestPoint<PointType, PointType> icp; // 设置最大对应距离为historyKeyframeSearchRadius的两倍 icp.setMaxCorrespondenceDistance(historyKeyframeSearchRadius*2); // 设置最大迭代次数为100 icp.setMaximumIterations(100); // 设置变换的收敛阈值为1e-6 icp.setTransformationEpsilon(1e-6); // 设置欧式适配度的收敛阈值为1e-6 icp.setEuclideanFitnessEpsilon(1e-6); // 设置RANSAC算法的迭代次数为0(禁用RANSAC算法) icp.setRANSACIterations(0); // 将cureKeyframeCloud设置为ICP算法的源点云输入 icp.setInputSource(cureKeyframeCloud); // 将prevKeyframeCloud设置为ICP算法的目标点云输入 icp.setInputTarget(prevKeyframeCloud); // 创建一个名为unused_result的指针,指向一个PointCloud对象 pcl::PointCloud<PointType>::Ptr unused_result(new pcl::PointCloud<PointType>()); // 调用icp.align函数,将ICP算法应用于输入的源点云和目标点云,并将结果存储在unused_result中 icp.align(*unused_result); // 检查ICP是否收敛且得分是否满足要求 if (icp.hasConverged() == false || icp.getFitnessScore() > historyKeyframeFitnessScore) return; // 把修正后的当前点云发布出去 // lio_sam/mapping/icp_loop_closure_corrected_cloud 发布ICP修正后的当前关键帧的点云信息 if (pubIcpKeyFrames.getNumSubscribers() != 0) { pcl::PointCloud<PointType>::Ptr closed_cloud(new pcl::PointCloud<PointType>()); pcl::transformPointCloud(*cureKeyframeCloud, *closed_cloud, icp.getFinalTransformation()); publishCloud(pubIcpKeyFrames, closed_cloud, timeLaserInfoStamp, odometryFrame); } // Get pose transformation float x, y, z, roll, pitch, yaw; Eigen::Affine3f correctionLidarFrame; // 获得两个点云的变换矩阵结果 // cureKeyframeCloud 向 prevKeyframeCloud 变换的矩阵 correctionLidarFrame = icp.getFinalTransformation(); // transform from world origin to wrong pose // 找到当前帧的位姿结果 Eigen::Affine3f tWrong = pclPointToAffine3f(copy_cloudKeyPoses6D->points[loopKeyCur]); // transform from world origin to corrected pose // 将ICP的结果补偿回去 就是稍晚帧的更为准确的位姿结果 Eigen::Affine3f tCorrect = correctionLidarFrame * tWrong;// pre-multiplying -> successive rotation about a fixed frame // 将当前帧的位姿转换成平移 + 欧拉角 pcl::getTranslationAndEulerAngles (tCorrect, x, y, z, roll, pitch, yaw); // from是修正后的当前帧的点云位姿 gtsam::Pose3 poseFrom = Pose3(Rot3::RzRyRx(roll, pitch, yaw), Point3(x, y, z)); // to是修正前的稍早的点云位姿 不做修正 gtsam::Pose3 poseTo = pclPointTogtsamPose3(copy_cloudKeyPoses6D->points[loopKeyPre]); gtsam::Vector Vector6(6); // 使用ICP的得分作为噪声的约束项 float noiseScore = icp.getFitnessScore(); Vector6 << noiseScore, noiseScore, noiseScore, noiseScore, noiseScore, noiseScore; // 转换成gtsam的格式 noiseModel::Diagonal::shared_ptr constraintNoise = noiseModel::Diagonal::Variances(Vector6); // Add pose constraint // 将两帧索引 两帧相对位姿和噪声作为回环的约束送入队列 mtx.lock(); // 回环帧的队列 回环帧 -- 匹配的回环帧 loopIndexQueue.push_back(make_pair(loopKeyCur, loopKeyPre)); // poseFrom 变换到 poseTo 的相对位姿变换存储在队列中 供因子图优化使用 loopPoseQueue.push_back(poseFrom.between(poseTo)); // 存储协方差矩阵 loopNoiseQueue.push_back(constraintNoise); mtx.unlock(); // add loop constriant // 保存已存在的约束对 loopIndexContainer[loopKeyCur] = loopKeyPre;执行ICP运算:
1. 发布当前帧的点云矫正后的点云 closed_cloud : lio_sam/mapping/icp_loop_closure_corrected_cloud
2.添加回环队列容器 loopIndexQueue : 存储的是 make_pair(loopKeyCur, loopKeyPre)型变量 为当前帧-匹配回环帧 在因子图优化中使用
3.添加回环队列容器 loopPoseQueue: 存储当前帧 -> 回环帧的相对位姿变换 供因子图优化使用
4.存储协方差矩阵 loopNoiseQueue : 供因子图优化时使用
5.保存已经存在的约束对 loopIndexContainer : 防止同一帧反复寻找回环
1.3 发布可视化回环信息 /lio_sam/mapping/loop_closure_constraints
void visualizeLoopClosure() { // 如果没有回环约束就算了 if (loopIndexContainer.empty()) return; visualization_msgs::MarkerArray markerArray; // loop nodes // 回环约束的两帧作为node添加 // 先定义下node的信息 visualization_msgs::Marker markerNode; markerNode.header.frame_id = odometryFrame; markerNode.header.stamp = timeLaserInfoStamp; markerNode.action = visualization_msgs::Marker::ADD; markerNode.type = visualization_msgs::Marker::SPHERE_LIST; markerNode.ns = "loop_nodes"; markerNode.id = 0; markerNode.pose.orientation.w = 1; markerNode.scale.x = 0.3; markerNode.scale.y = 0.3; markerNode.scale.z = 0.3; markerNode.color.r = 0; markerNode.color.g = 0.8; markerNode.color.b = 1; markerNode.color.a = 1; // loop edges // 两帧之间约束作为edge添加 visualization_msgs::Marker markerEdge; markerEdge.header.frame_id = odometryFrame; markerEdge.header.stamp = timeLaserInfoStamp; markerEdge.action = visualization_msgs::Marker::ADD; markerEdge.type = visualization_msgs::Marker::LINE_LIST; markerEdge.ns = "loop_edges"; markerEdge.id = 1; markerEdge.pose.orientation.w = 1; markerEdge.scale.x = 0.1; markerEdge.color.r = 0.9; markerEdge.color.g = 0.9; markerEdge.color.b = 0; markerEdge.color.a = 1; // 遍历所有回环约束 for (auto it = loopIndexContainer.begin(); it != loopIndexContainer.end(); ++it) { int key_cur = it->first; int key_pre = it->second; geometry_msgs::Point p; p.x = copy_cloudKeyPoses6D->points[key_cur].x; p.y = copy_cloudKeyPoses6D->points[key_cur].y; p.z = copy_cloudKeyPoses6D->points[key_cur].z; // 添加node和edge markerNode.points.push_back(p); markerEdge.points.push_back(p); p.x = copy_cloudKeyPoses6D->points[key_pre].x; p.y = copy_cloudKeyPoses6D->points[key_pre].y; p.z = copy_cloudKeyPoses6D->points[key_pre].z; markerNode.points.push_back(p); markerEdge.points.push_back(p); } markerArray.markers.push_back(markerNode); markerArray.markers.push_back(markerEdge); // /lio_sam/mapping/loop_closure_constraints 回环约束信息 pubLoopConstraintEdge.publish(markerArray); }发布回环约束信息 /lio_sam/mapping/loop_closure_constraints。