解决了在 ROS melodic / noetic 下 cv_bridge 与 opencv4 版本冲突导致的 opencv 操作 导致 Segmentation fault (core dumped) 的问题。
问题描述
在 ubuntu18.04 ROS melodic 下整理好 ORBSLAM3 ROS 功能包后,编译通过,但是运行节点时出现段错误:Segmentation fault (core dumped)。
发现错误发生在使用 opencv4 的 cv::FileStorage 读取 yaml 文件处,而这个错误在运行非 ROS 版本的 ORBSLAM3 程序时并不会发生。
即以下代码无法执行:
cv::FileStorage fsSetting("yaml文件路径", cv::FileStorage::READ);
if(!fsSettings.isOpened()){
cerr << "Failed to open settings file at: " << path << endl;
exit(-1);
}
当然除了cv::FileStorage,其他 opencv 的操作也可能导致错误。
最后发现在 CMakeLists.txt 中不添加 cv_bridge 包,cv::FileStorage 就能正常读取文件:
find_package(catkin REQUIRED COMPONENTS
# cv_bridge
)
后来在ubuntu20.04 ROS noetic 下同样是编译通过,运行节点出现段错误,但是出现段错误的点不在 cv::FileStorage 读取 yaml 文件处。
因为 melodic 版本的 cv_bridge 功能包中所用 opencv 版本为 opencv3,所以原因应该是 cv_bridge 与 opencv4 版本冲突。
noetic 版本的 cv_bridge 功能包使用的是 opencv4,但是同样会因为 opencv4 版本不一致出现冲突,而在 catkin_make 结束后该冲突只以 warning 的形式提示。
解决方法
解决问题的方法是通过将 cv_bridge 和 我们自己功能包的依赖设为同一版本的 opencv。
采用重新编译 cv_bridge 功能包的方法,解决该冲突问题。
-
下载 cv_bridge
下载 noetic 版本的 cv_bridge。(noetic 版本的 cv_bridge 在 melodic 下也能使用,不过要做一些修改,后续会说明)
下载地址:https://github.com/ros-perception/vision_opencv/tree/noetic
下载完成后,将 cv_bridge 拷贝到 ros 工作空间的 src 文件夹下。
为了不影响原来的包,将该文件夹重命名为 cv_bridge_new,并且将文件夹下 CMakeLists.txt 文件中 project 名称修改为 cv_bridge_new:project(cv_bridge_new)并且修改 package.xml 中包的名称:
<package format="2"> <name>cv_bridge_new</name> ...在 CMakeLists.txt 文件中指定我们自己的功能包中所用的 opencv4:
... set(OpenCV_DIR opencv路径/opencv/build) set(_opencv_version 4) find_package(OpenCV 4 QUIET) ... -
编译 cv_bridge
cd 到工作空间的根目录,执行catkin_make
在 noetic 版本下直接编译成功,生成名为 cv_bridge_new 的包。
接下来在自己的功能包中使用 cv_bridge_new 包就行。可跳过去看第 3 步。如果是 melodic ,会出现两个问题:
① 编译过程中会报错:Could not fild the following Boost libraries: boost_python37找不到 boost_python37 库。
在 /usr/lib 文件夹下查找 boost_python ,其实是有这个库的,只不过名字尾缀不为python37,而是 python3。
可以通过建立软链接的方式让 CMake 找到该库,网上有解决方案。
也可以直接修改 CMakeLists.txt 文件:... if(PYTHONLIBS_VERSION_STRING VERSION_LESS "3.8") # Debian Buster find_package(Boost REQUIRED python3) ...② 重新编译,发现还是会有错误。
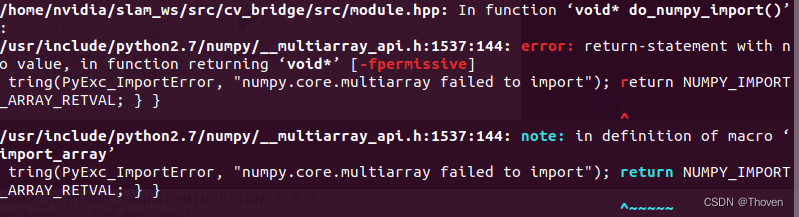
参考博客1,修改 cv_bridge_new/src/module.hpp 文件下void* do_numpy_import()函数为:static void do_numpy_import( ) { import_array( ); }修改完成后就能成功通过编译。
-
使用 cv_bridge_new 包
在自己的功能包中,修改 CMakeList.txt 文件:find_package(catkin REQUIRED COMPONENTS cv_bridge_new )修改 package.xml 文件:
... <build_depend>cv_bridge_new</build_depend> ... <exec_depend>cv_bridge_new</exec_depend> ...注意源文件不需要做任何修改,即不需要修改源文件 include 的 cv_bridge 的头文件名称,虽然我们编译生成的包名修改为了 cv_bridge_new。(参考博客 [2] 中修改源文件的步骤是错误的)
重新编译,运行节点就能正常使用 opencv4 。
参考
[1] 解决ROS配置中cv_bridge问题:https://zhuanlan.zhihu.com/p/347455336
[2] ROS学习:cv_bridge与opencv版本冲突三种解决方案:https://blog.csdn.net/qinqinxiansheng/article/details/120219388