一文教你彻底学会IIC协议
一.概况SPI
SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设备接口,是一种高速全双工的通信总线。它被广泛地使用在 ADC、 LCD 等设备与 MCU 间,要求通讯速率较高的场合。这里可以对比我写的另外一篇博客一文教你彻底学会IIC协议
1.信号线:SPI具有SCK,MOSI,MISO ,CS线 (区别于IIC只有CLK,SDA).。
2.寻址方式: SPI是通过CS片选信号来选择从机(IIC是通过寻址找到从设备)
3.通信速率:SPI速率较快(可达fPCLK/2),一般用于高速设备之间通信(区别于IIC)

二.SPI连接
2.1 一主一从
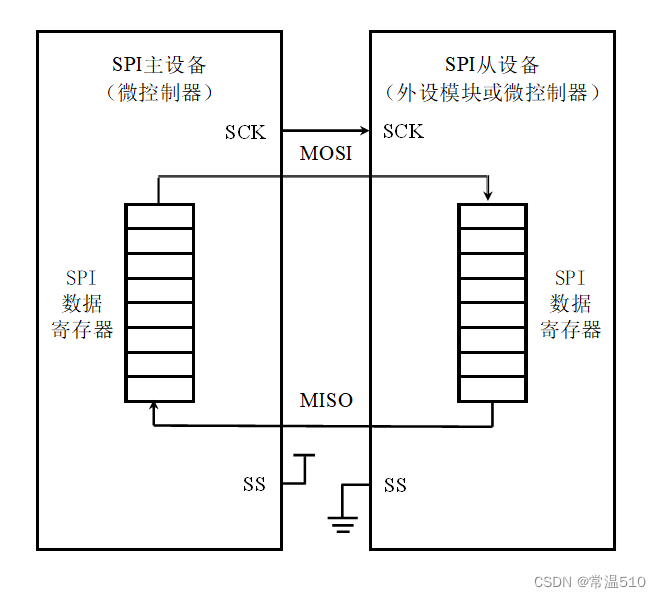
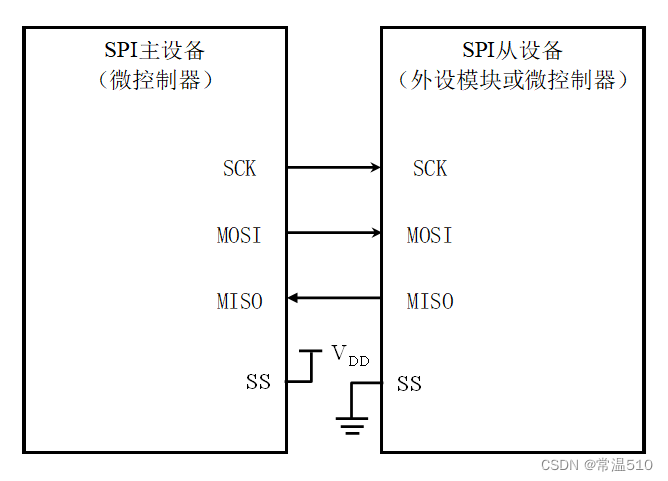
在“一主一从”的SPI互连方式下,只有一个SPI主设备和一个SPI从设备进行通信。这种情况下,只需要分别将主设备的SCK、MOSI、MISO和从设备的SCK、MOSI、MISO直接相连,并将主设备的SS置高电平,从设备的SS接地(即置低电平,片选有效,选中该从设备)即可。
2.2 一主多从
在“一主多从”的SPI互连方式下,一个SPI主设备可以和多个SPI从设备相互通信。这种情况下,所有的SPI设备(包括主设备和从设备)共享时钟线和数据线,即SCK、MOSI、MISO 3根线,并在主设备端使用多个GPIO引脚来选择不同的SPI从设备。

三.SPI通信过程
讲通信过程之前,先讲一下极性和相位。后面才能理解后序采样过程。
3.1 CPOL(极性)和CPHA(相位)
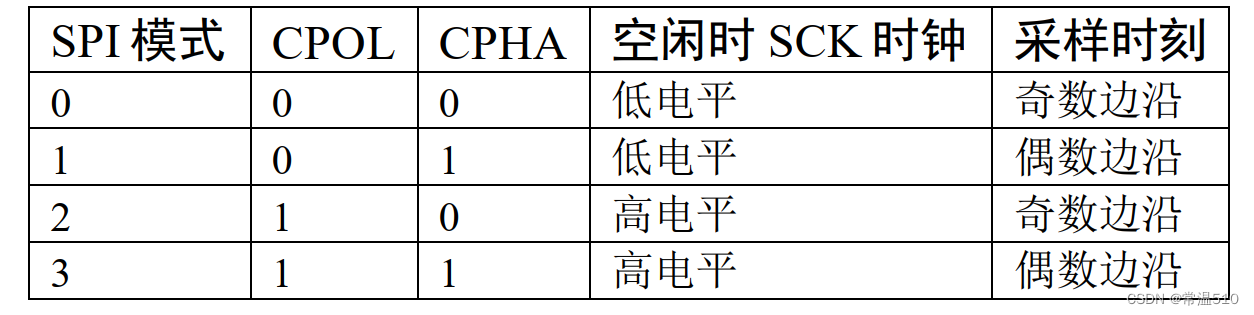
CPHA(时钟相位)位被清“0”,数据在SCK时钟的奇数(第1、3、5…个)跳变沿采样.
CPHA(时钟相位)位被置“1”,数据在SCK时钟的偶数(第2、4、6…个)跳变沿采样.
CPOL位为“0”时就是SCK在空闲时为0, CPOL位为“1”时就是SCK空闲时为1。
所以说,CPOL决定了第一个沿是上升沿还是下降沿。如果SCK空闲是为0,那第一个沿为上升沿。如果SCK空闲时为1,那第一个沿为下降沿。
那么总的来说,CPHA和CPOL决定了是上升沿采样还是下降沿采样。
所以总共有4种组合,决定了SPI有4种模式,总的表格如下:
3.2 SPI时序图
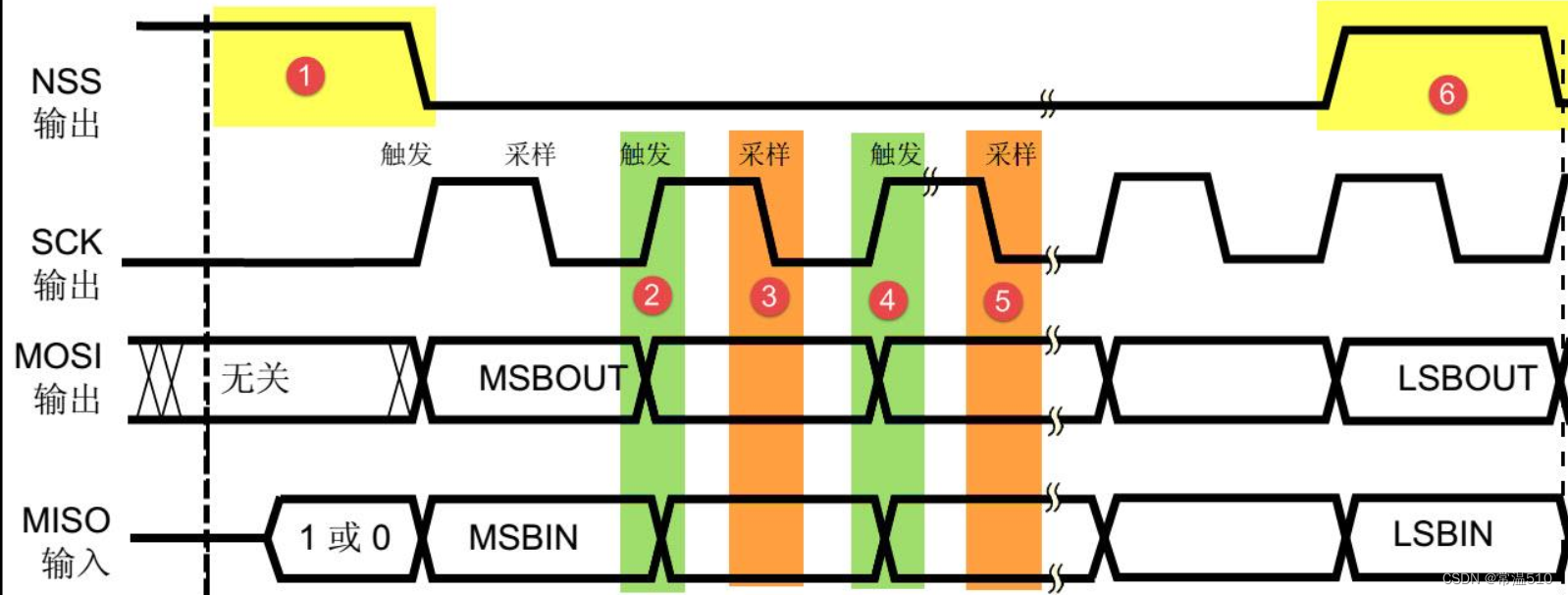
这是一个主机的通讯时序,我们以SPI模式0为例。 NSS、 SCK、 MOSI 信号都由主机控制产生,而 MISO 的信
号由从机产生,主机通过该信号线读取从机的数据。 MOSI 与 MISO 的信号只在 NSS 为低
电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
3.1 SPI起始信号
NSS 信号线由高变低,是 SPI 通讯的起始信号。 NSS 是每个从机各自独占的信号线,当从机在自己的 NSS 线检测到起始信号后,就知道自己被主机选中了,开始准备与主机通讯。
3.2 SPI停止信号
NSS 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
3.3 数据的有效性
SPI 使用 MOSI 及 MISO 信号线来传输数据,使用 SCK 信号线进行数据同步。 MOSI 及MISO 数据线在 SCK 的每个时钟周期传输一位数据,且数据输入输出是同时进行的。数据传输时, MSB 先行或 LSB 先行并没有作硬性规定,但要保证两个 SPI 通讯设备之间使用同样的协定, MOSI 及 MISO 的数据在 SCK 的上升沿期间变化输出,在SCK 的下降沿时被采样。即在 SCK 的下降沿时刻, MOSI 及 MISO 的数据有效,高电平时表示数据“1”,为低电平时表示数据“0”。在其它时刻,数据无效, MOSI及 MISO 为下一次表示数据做准备。SPI 每次数据传输可以 8 位或 16 位为单位,每次传输的单位数不受限制。
四.代码实例
这里以和Flash通信为例,下面是一个初始化代码
void SPI_FLASH_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能SPI时钟 */
RCC_APB2PeriphClockCmd( RCC_APB2Periph_SPI1, ENABLE );
/* 使能SPI引脚相关的时钟
1.片选引脚 2.SCK时钟引脚 3.MISO引脚 4.MOSI引脚 */
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOA|
RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOA, ENABLE );
/* 配置SPI的 CS引脚,普通IO即可 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 配置SPI的 SCK引脚*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 配置SPI的 MISO引脚*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 配置SPI的 MOSI引脚*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/* 停止信号 FLASH: CS引脚高电平*/
GPIO_SetBits(GPIOA,GPIO_Pin_4);
/* SPI 模式配置 */
// FLASH芯片 支持SPI模式0及模式3,据此设置CPOL CPHA
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;//全双工模式
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //主机
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //8位
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //极性高
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //偶边沿
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //软件控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4; //速率4分频
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //高位先行
SPI_InitStructure.SPI_CRCPolynomial = 7; //数据校验 --一般不需要
SPI_Init(FLASH_SPIx , &SPI_InitStructure); //初始化结构体
/* 使能 SPI */
SPI_Cmd(SPI1 , ENABLE);
}