来源:专知
本文为论文介绍,建议阅读5分钟
我们的方法有效地增强了时空交通预测模型的对抗性鲁棒性。
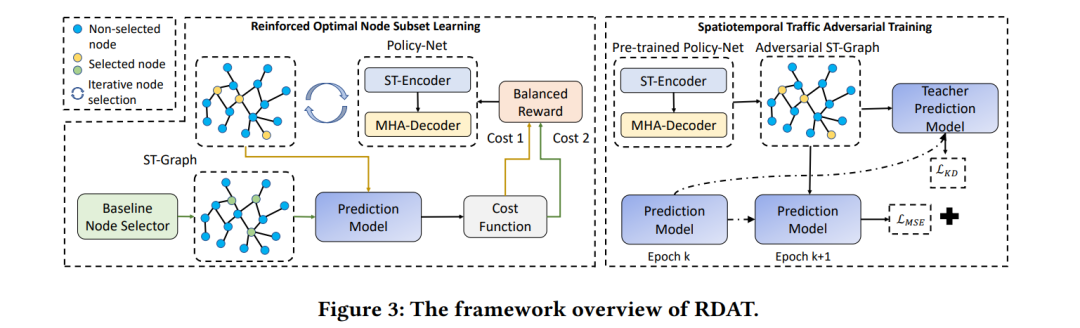
在智能交通系统(ITS)中,基于机器学习的预测模型通常用于预测交通模式并提供全市服务。然而,现有的大多数模型容易受到对抗攻击的影响,这可能导致预测不准确,从而产生诸如拥堵和延误等负面后果。因此,提高这些模型的对抗性鲁棒性对于ITS至关重要。在本文中,我们提出了一种新颖的框架,将对抗性训练融入时空交通预测任务。我们证明,为静态领域设计的传统对抗性训练方法不能直接应用于交通预测任务,因为它们未能有效地防御动态对抗攻击。接着,我们提出了一种基于强化学习的方法来学习对抗性示例的最优节点选择策略,这同时增强了动态攻击的防御能力并减少了模型过拟合。此外,我们引入了一个自知识蒸馏正则化模块,以克服在训练过程中由于不断变化的对抗节点而导致的“遗忘问题”。我们在两个真实世界的交通数据集上评估了我们的方法,并证明了其优于其他基线。我们的方法有效地增强了时空交通预测模型的对抗性鲁棒性。我们的框架源代码可在 https://github.com/usail-hkust/RDAT 上找到。