葡萄采摘定位论文汇总
基于改进的Yolov5和自然环境中的采摘点的定位 2023
Identifcation of table grapes in the natural environment based on an improved Yolov5 and localization of picking points
期刊: Precision Agriculture
摘要: 针对自然环境中餐桌葡萄采摘点定位的特点,提出了一种基于Yolov5的Yolov5-CBAM-第四检测层解耦(Yolov5- CFD)网络,实现了葡萄和茎的识别。同时,利用几何方法实现了采摘点的快速定位。首先,为了提高骨干网模块的特征提取能力,通过整合卷积块注意模块(CBAM)的注意机制进行了改进。其次,针对一个小目标是隐蔽性检测的问题,在颈部模块中添加了第四层检测。此外,本文借鉴Yolox的解耦结构,对Yolov5的头部模块进行了改进,优化了网络的分类和回归性能。此外,采用几何方法快速准确地定位餐桌葡萄的采摘点。为了验证所提出的网络模型的有效性,我们使用了大约10,000张葡萄图像进行训练。结果表明,Yolov5s-CFD模型的检测精度、召回率、mAP_0.5和mAP_0.5:0.95分别分别为0.857、0.804、0.855、0.642。Yolov5m-CFD模型的检测精度、召回率、mAP_0.5和mAP_0.5:0.95分别分别为0.986、0.987、0.993和0.910。此外,还将选择点定位的成功率与相应的网络结构进行了比较。结果表明,与初始Yolov5s相比,Yolov5s-CFD模型的选点定位成功率提高了11.53%,Yolov5m-CFD模型的成功率比初始Yolov5提高了5.84%。虽然改进后的Yolov5模型的识别时间比初始的Yolov5模型增加了,但它仍然是可以接受的。充分满足餐桌葡萄机械化采的要求,为葡萄机械化采提供了理论依据。
附图:
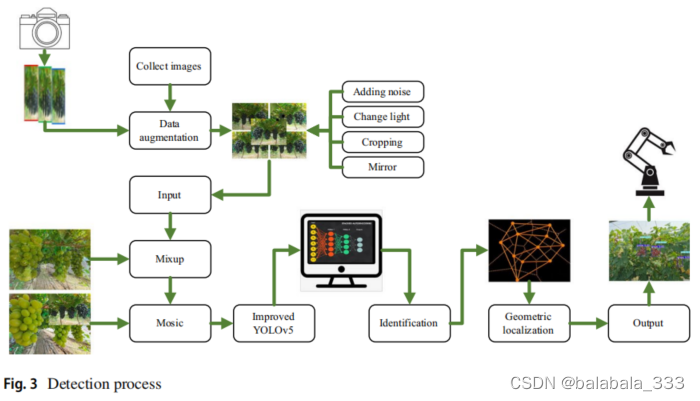
首先,对Yolov5的v6.0进行改进,对餐桌葡萄和葡萄茎进行训练和检测。然后,分别提取葡萄茎的信息。最后,用几何方法得到了餐桌葡萄的采摘点。所提方法的概述如上图。
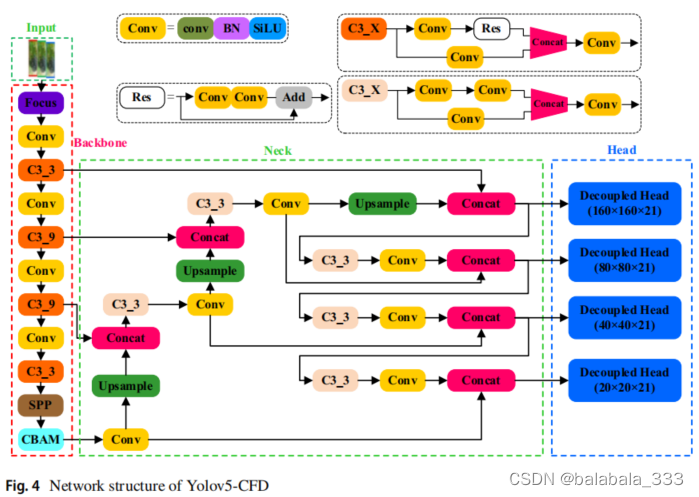
改进主要在Backbone、Head和Neck部分:为避免多卷积导致有效特征信息的丢失,在主干模块的末端添加了CBAM模块,改进Head模型,分别进行了分类和回归任务;在Neck模块中增加了一个小目标识别的检测层。
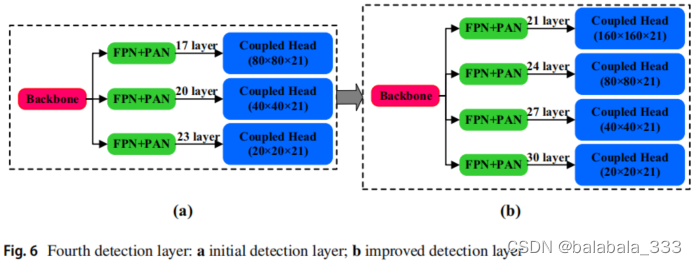
特征金字塔FPN和像素聚合网络PAN的葡萄和果梗特征图,输出作为检测层的输入即模型的21、24、27、30层。
 输入后由Conv2D_BN_SiLU来处理输入的特征图,该特征由卷积层、BN层和SiLU激活函数组成。
输入后由Conv2D_BN_SiLU来处理输入的特征图,该特征由卷积层、BN层和SiLU激活函数组成。
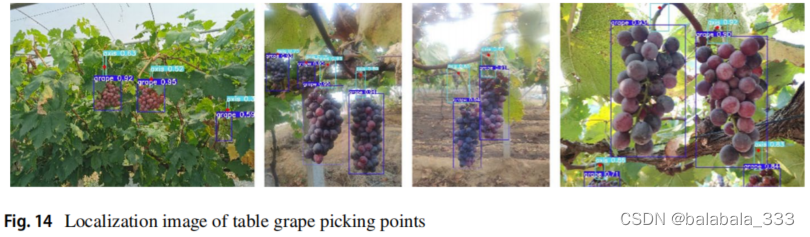
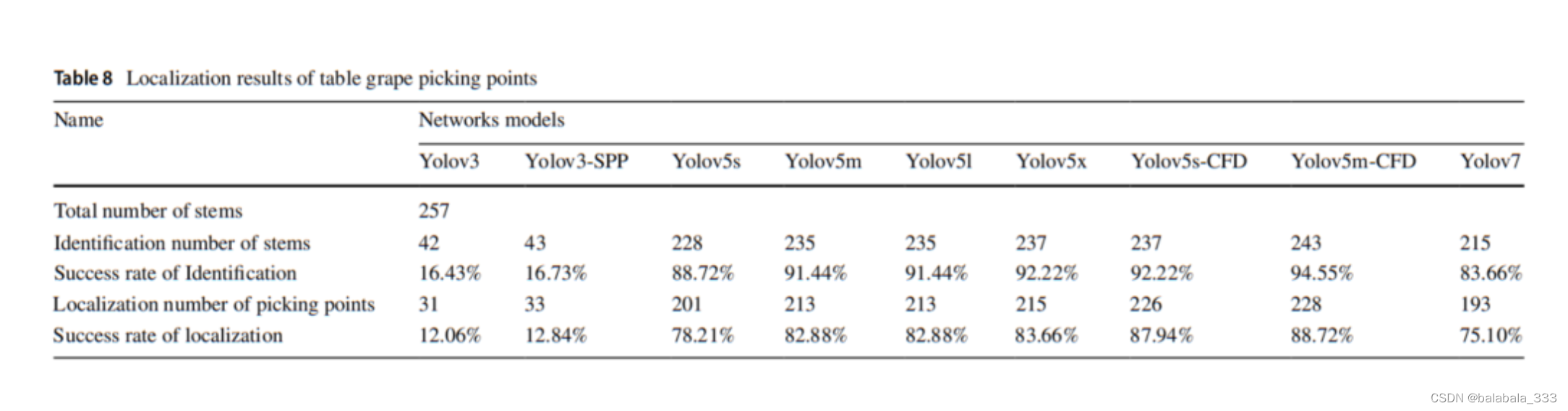
长距离的葡萄果梗像素比较低,通过K-means聚类算法、OTSU算法和调色方法提取葡萄果梗;
果梗图像的高宽比作为果梗分类依据,实现采摘定位:
1.高/宽大于等于3时认为果梗垂直不弯曲,果梗图像的中点作为采摘点
2.高/宽小于3时认为果梗弯曲,弯曲点位于图像的上部,颜色比背景深,以图像中心正上方的点作为采摘点
以下是消融实验:
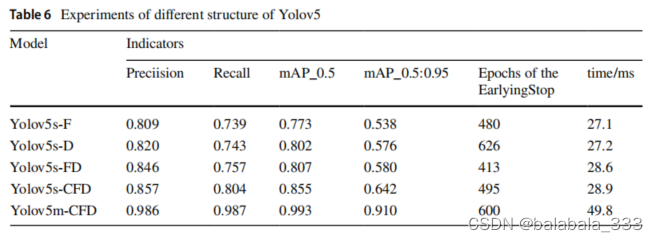
yolov5的不同实验
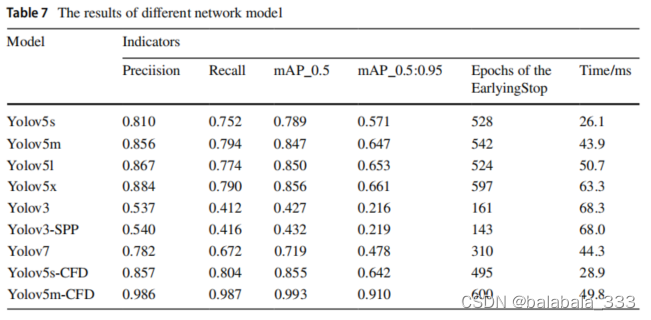
不同网络模型的结果
Yolov5s, Yolov5m, Yolov5l, Yolov5x, Yolov3, Yolov3-SPP, Yolov7,
Yolov5s-D (Yolov5s-Decoupled), Yolov5s-F (Yolov5s-Fourth Detection Layer), Yolov5s
FD (Yolov5s-Fourth Detection Layer-Decoupled), Yolov5s-CFD (Yolov5s-CBAM-Fourth
Detection Layer-Decoupled), Yolov5m-CFD (Yolov5s-CBAM-Fourth Detection Layer
Decoupled).进行对比