引言
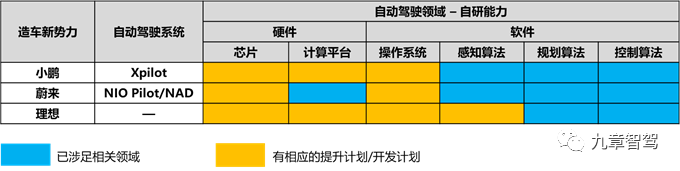
随着“智能化”浪潮的到来,国内外各大车企开始了自动驾驶领域的军备竞赛;国内造车新势力如蔚来、小鹏、理想等都在摩拳擦掌、各展神通,只为到2025年之前能够获得自动驾驶赛道的一张入门券;
一、自动驾驶系统纵向演进路径
1. 蔚来-自动驾驶系统纵向演进路径
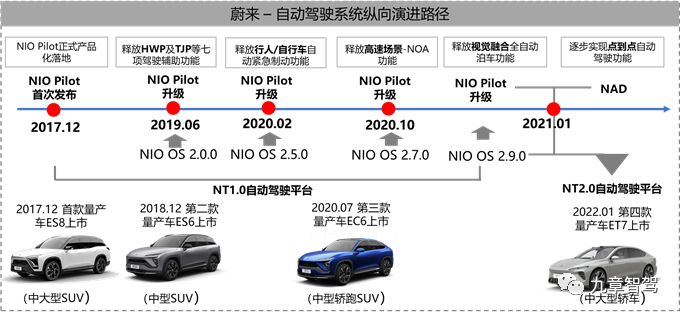
蔚来-自动驾驶系统纵向演进路径
2017年12月,在蔚来日“NIO Day”首次发布了驾驶辅助系统NIO Pilot;
2019年6月,车机系统NIO OS通过OTA升级到NIO OS 2.0.0版本,NIO Pilot系统完成首次重大升级,新增了7项功能,包括高速自动辅助驾驶、拥堵自动辅助驾驶、转向灯控制变道、道路交通标识识别、车道保持功能、前侧来车预警、自动泊车辅助系统;
2020年2月,车机系统NIO OS升级到2.5.0版本,NIO Pilot系统新增自动紧急制动(行人及自行车)、超车辅助以及车道内避让功能;
2020年10月,车机系统NIO OS升级到2.7.0版本,NIO Pilot系统加入了高精地图的使用,新增了自动辅助导航驾驶功能(NOA);在后方横穿车辆预警功能的基础上,增加了主动制动功能;将驾驶员疲劳监测功能进行了升级,新增了摄像头对对驾驶员面部、眼部以及头部姿态特征的识别信息,通过多种信息进行综合判定;
2021年1月,车机系统NIO OS升级到2.9.0版本,NIO Pilot系统新增视觉融合全自动泊车、车辆近距离召唤;对NOA功能进行优化:增强了该功能在主动变道与汇入/驶离主路场景下的稳定性;
2021年1月,在蔚来日“NIO Day”发布了自动驾驶系统NAD,包含NIO Aquila蔚来超感系统和NIO Adam蔚来超算平台;并且将逐步实现覆盖高速、城区、泊车等全场景下的点到点的自动驾驶功能体验。
2. 小鹏-自动驾驶系统纵向演进路径
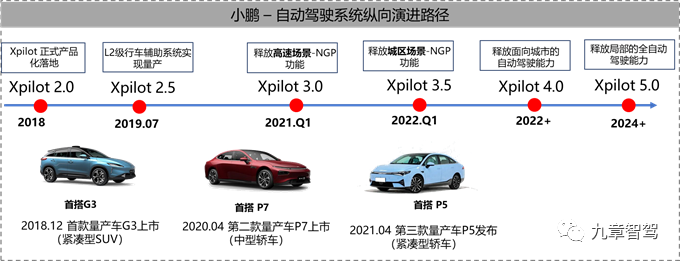
小鹏-自动驾驶系统纵向演进路径
1)Xpilot2.0:自动驾驶辅助系统Xpilot的首个正式产品落地化版本
2019年1月,首次向小鹏G3用户推送OTA升级,升级的Xpilot2.0系统新增了车辆钥匙召唤功能;优化了自动泊车功能:自动泊车将适配更多场景,支持带有阴影的停车位,地锁识别更加精准;
2019年6月,通过OTA向小鹏G3用户推送Xmart OS 1.4版本,升级完成后的小鹏G3将具备ICA智能巡航辅助功能(60km/h以上LCC车道居中辅助);
2)Xpilot2.5:L2级行车辅助系统实现量产应用
2019年7月,通过OTA向G3用户推送了Xmart OS 1.5版本,升级完成后的小鹏G3将具备自动变道辅助、交通拥堵辅助等驾驶辅助功能;
3)Xpilot3.0:释放高速场景NGP-自动导航辅助驾驶功能
2020年第二季度:XPILOT 3.0硬件系统在小鹏P7上实现搭载应用;
2020年第四季度:XPILOT 3.0的基础功能完成交付,即通过OTA开放ACC/LCC/ALC等功能;
2021年第一季度:通过OTA向P7用户推送了Xmart OS 2.5.0版本,通过这次升级,搭载XPILOT 3.0系统的小鹏P7具备了高速道路-NGP自动导航辅助驾驶功能;
2021年6月:开始了Xmart OS 2.6.0版本的公测,通过这次升级,Xpilot3.0系统新增停车场记忆泊车、智能远光灯以及驾驶员状态监测;同时对NGP自动导航辅助驾驶功以及车道居中功能进行了优化;
4)Xpilot 3.5:释放城区场景NGP-自动导航辅助驾驶功能
Xpilot 3.5增加了城市场景NGP功能,并对停车记忆泊车功能进行了优化
计划于2021年第四季度开始向用户交付小鹏P5, Xpilot3.5系统中的城市场景NGP功能将于年底开始内部用户测试,并于2022年初通过OTA提供给用户;
3. 理想-自动驾驶系统纵向演进路径

理想车型开发与自动驾驶系统纵向演进路径
理想汽车的自动驾驶研发进展与蔚来、小鹏这两家相比稍微靠后一些,但自从2020年7月公司赴美IPO,以及9月原伟世通首席架构师王凯加入理想后,理想汽车明显加快了自动驾驶领域的研发步伐;
李想在2020年的一次访谈中公布了理想汽车自动驾驶发展的路线图:
1)2021-2022年:实现自动导航辅助驾驶功能;
2)2023年:推出全新车型理想X01 - 配备支持L4级自动驾驶能力的硬件系统
3)2024年:在量产车型上,通过OTA实现L4级自动驾驶能力
二、自动驾驶系统 - 感知方案
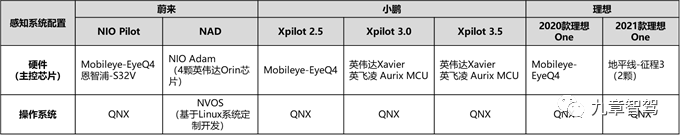
附表1:三家造车势力-感知系统解决方案对比
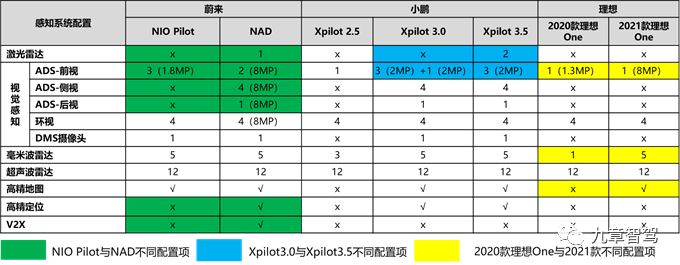
注:√ 有此配置,×无此配置
1. 蔚来-自动驾驶系统感知解决方案

NIO Pilot 和 NAD系统感知方案对比
注:1)√有此配置 ,N/A 不适用,— unknown
2)蔚来ET7的11个800万高清摄像头中有部分摄像头的供应商是联创电子;通过查询联创电子官网,了解到该公司在车载摄像头的应用领域主要是环视和后视,因此可推断蔚来ET7的环视摄像头很大概率是由联创电子供货。
相较于NIO pilot系统,NAD系统的感知解决方案更加完善:
摄像头方面-增加了侧视和后视ADS摄像头;但是ADS前视却由3个摄像头变成了2个摄像头;
注:原因推测-NAD系统采用ADS前视摄像头*2+侧前视摄像头(瞭望塔式布局)*2+前置激光雷达*1,完全能够覆盖到NIOpilot系统采用三目摄像头情况下的视野探测范围;
激光雷达-增加了一个前置激光雷达
新增C-V2X通讯模块;
1)NIO Pilot- 感知系统
感知传感器:ADS摄像头*3+环视摄像头*4+毫米波雷达*5+超声波雷达*12+DMS摄像头*1
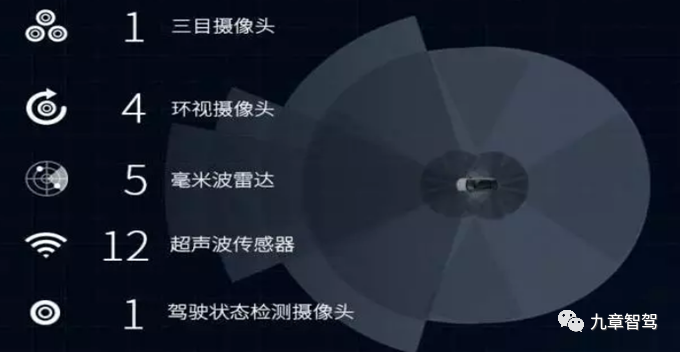
NIO Pilot 传感器配置(图片来源:蔚来官网)
重点传感器介绍:
a. 前视摄像头:三目摄像头(180万像素,蔚来自主研发)
52°中距离摄像头:主要用于一般性道路状况监测
28°长焦远距离摄像头:探测远距离目标和红绿灯
150°广视角近距离摄像头:探测车身侧面和短距离插队的车辆
三目摄像头主要实现的功能如下图所示:
实现功能:道路标识识别、远近光自动控制、车道偏离预警、车道自动保持、紧急制动辅助、前向碰撞预警

三目摄像头功能实现(图片来源–蔚来官网)
b.毫米波雷达:1个前置长距离雷达 + 4个角雷达
实现功能:车道变换预警、车辆盲点监控、侧方开门预警、前向来车预警、后向来车预警

毫米波雷达功能实现(图片来源–蔚来官网)
2) NAD- 感知系统
蔚来Aquila超感系统:感知传感器 + 高精度定位单元(GPS+IMU)+车路协同感知V2X
感知传感器:激光雷达*1 + ADS摄像头*7 + 环视摄像头*4 + 毫米波雷达*5+超声波雷达*12
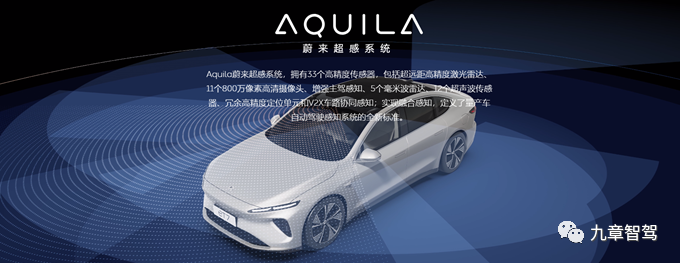
蔚来超感系统(图片来源–蔚来官网)
重点传感器介绍:
a、激光雷达(图达通- Falcon)性能参数:
类型:双轴旋转镜扫描式混合固态激光雷达
探测距离:250m@10%反射率
FOV(H&V):120°*30°
角分辨率(H&V):0.06°*0.06°
激光波长:1550nm
b.ADS高清摄像头:
7颗ADS摄像头(8MP):前视*2(前风挡)+ 侧前视*2(车顶前部两侧)+ 侧后视*2(翼子板) + 后视*1(车顶后部居中)
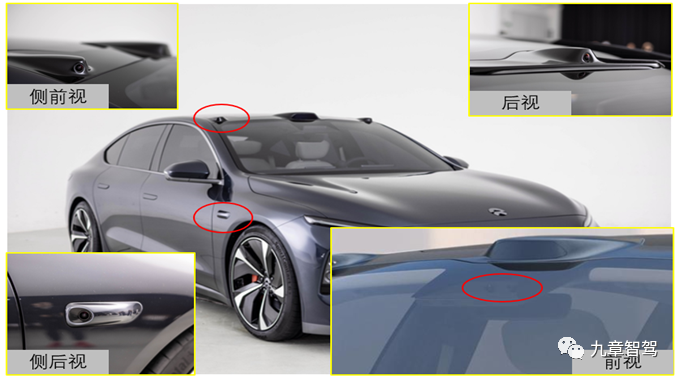
ADS摄像头布置位置示意图
侧前视摄像头-瞭望塔布局:传感器视线可有效越过遮挡,减小盲区
减小盲区:在城市场景下,传感器视线很容易被绿化带和车辆遮挡,相较于安装在 B 柱和后视镜的摄像头,部署在车顶的高位侧前摄像头,能够减小盲区;
作为前向视觉冗余:布置在车顶高位侧前摄像头,因位置高,故视野广,提高了前向视觉的冗余度。即使前向主摄像头不工作,依靠两个高位侧前摄像头,仍然可以实现前向视觉的完整感知。
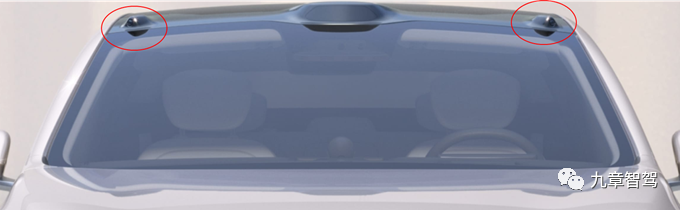
蔚来ET7侧前视摄像头(图片来源-蔚来官网)
2. 小鹏 - 自动驾驶系统感知解决方案

不同版本Xpilot 系统感知方案对比
注:√有此配置,N/A 不适用,— unknown
Xpilot 3.0 相比于Xpilot2.5 :
ADS摄像头:前视摄像头由单目升级成三目摄像头+1颗前置单目摄像头,增加侧视(4颗)和后视(1颗)共5颗摄像头
增加了1颗驾驶员监控摄像头
毫米波雷达:新增了两颗后置角雷达
新增了高精地图的应用
Xpilot 3.5 相比于Xpilot3.0:
ADS摄像头:前视中去掉了1颗前置单目摄像头
注:原因推测- Xpilot3.5 系统中在车辆前部布置有两颗激光雷达,完全可替代之前的单目摄像头,起到感知冗余的作用。
激光雷达:新增了2颗前置激光雷达
1)Xpilot 2.5 - 感知系统
感知系统配置:ADS摄像头*1+环视摄像头*4+毫米波雷达*3+超声波雷达*12
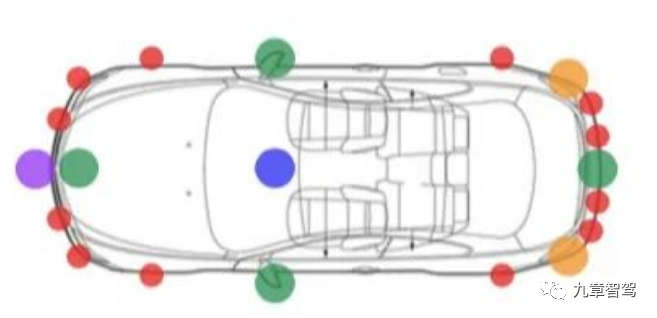
Xpilot 2.5 传感器配置(图片来源:网络)
注:紫色圆圈-前置中距毫米波雷达*1,橙色圆圈-后置近距毫米波雷达*1,绿色圆圈-环视摄像头*4,蓝色圆圈-前置主摄像头*1,红色圆圈-超声波雷达*12。
重点传感器介绍:
a. 前置毫米波雷达(博世-MRR Evo14)
中距离雷达:拥有广角/窄角两种探测角度,探测距离分别为:100米和160米;布置于前保险杠中间位置,主要用于前方目标物的探测与追踪。
b.后置毫米波雷达(博世)
近距离雷达:探测距离0.36~80m;布置于后保险杠两侧,主要用于车身两侧后方障碍物的探测
2) Xpilot 3.0 - 感知系统
感知系统配置:感知传感器 + 高精度地图(高德)+高精度定位
感知传感器:ADS摄像头*9+环视摄像头*4+毫米波雷达*5+超声波雷达*12+DMS摄像头*1
重点传感器介绍:
9颗ADS摄像头:前置三目(前风挡)+前置单目(前风挡)+侧前视*2(后视镜底座)+侧后视*2(翼子板)+后视*1(牌照板上部)
a. 前置三目摄像头:
长距离窄视角摄像头(28°):主要用于前向移动物体探测,如自动紧急制动,自适应巡航,前向碰撞预警
性能参数:探测距离150m以上,分辨率-1828*948,像素-2MP,帧率-15fps
中距离主摄像头(52°):主要用于交通信号灯识别、车道识别以及前方移动物体的探测, 如 交通信号灯探测,自动紧急制动,自适应巡航,前向碰撞预警,车道偏离预警
性能参数:像素-2MP,帧率-60fps
短距离广视角摄像头(100°):主要用于防加塞、雨量探测以及交通信号灯识别
性能参数:像素-2MP,帧率-60fps
b. 前置单目-安全冗余感知摄像头(前风挡):像素-2MP,帧率-69fps
作用:作为前置三目摄像头感知失效情况下的感知冗余传感器
3) Xpilot 3.5 - 感知系统
感知系统配置:感知传感器+高精度地图(高德)+高精度定位
感知传感器:激光雷达*2+ADS摄像头*8+环视摄像头*4+毫米波雷达*5+超声波雷达*12+DMS摄像头*1
重点传感器介绍
a.激光雷达(大疆Livox-HAP)性能参数:
类型:双棱镜扫描式混合固态激光雷达
探测距离:150m@10%反射率)
FOV(H&V):120°*30°
角分辨率(H&V):0.16°*0.2°
激光波长:905nm
b.8颗ADS摄像头:前视*3(前风挡,2MP像素)+ 侧前视*2(后视镜底座)+ 侧前视*2(翼子板)+ 后视*1(牌照板上部)

小鹏P5 – ADS摄像头布置位置示意图
3. 理想-自动驾驶系统感知解决方案

理想汽车自动驾驶系统感知方案对比
注:√有此配置 ,N/A 不适用,— unknown,(E)据推测
2021款理想One相比2020款理想One的感知系统:
a.前置摄像头性能参数提升:老款理想One前置单目摄像头为130万像素,水平视角52°;新款理想One配置的单目摄像头为800万像素,水平视角120°
b.增加了毫米波雷达数量:新增加了4个角雷达
1)2020款理想One - 感知系统
传感器配置:ADS摄像头*1+环视摄像头*4+毫米波雷达*1+超声波雷达*12

理想one 传感器布置示意图
注:上图可以看到前风挡位置有3颗摄像头:a. 上方的2颗中只有②为ADS摄像头,即用于行驶过程中的驾驶辅助摄像头;b. 另外1颗摄像头①为数据采集与收集摄像头,专门用于收集道路信息和驾驶场景等数据信息,便于后续对相关算法的训练与优化;c. 最下方的③摄像头为行车记录仪摄像头;
重点传感器介绍:
前置单目ADS摄像头(豪威科技-OV10642)和环视摄像头(豪威科技-OV10640)
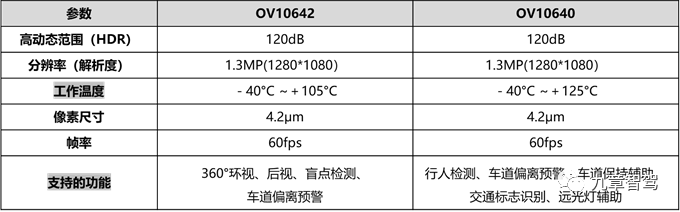
OV10642与OV10640性能参数对比
2)2021款理想One – 感知系统
传感器配置:ADS摄像头*1+环视摄像头*4+毫米波雷达*5+超声波雷达*12
重点传感器介绍:
a. 前置单目摄像头:8MP像素,水平视角120°,探测距离200m
b. 毫米波角雷达:博世第五代雷达,水平视角120°,探测距离110m
3)理想X01 - 感知系统
感知系统配置:激光雷达*1+ADS摄像头*8(E)+环视摄像头*4+毫米波雷达*5(E)+超声波雷达*12+DMS摄像头*1
三、自动驾驶系统 - 计算平台
附表2. 三家造车新势力自动驾驶系统计算平台对比
1.蔚来 – 自动驾驶系统计算平台
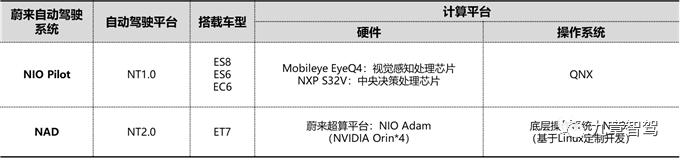
蔚来自动驾驶计算平台信息梳理
1)NIO Pilot 自动驾驶计算平台
硬件:Mobileye-EyeQ4芯片(感知处理运算)+恩智浦-S32V芯片(决策处理运算)
a. EyeQ4性能参数:算力-2.5 TOPS,功耗-3W,响应时间-20ms,制程工艺-28nm,芯片类型-ASIC
b. S32V 性能参数:算力-9200 DMIPS,处理器-4核64位CPU Arm®Cortex®-A53 1GHZ ,4核32位CPUArm®Cortex®-M4 133MHZ
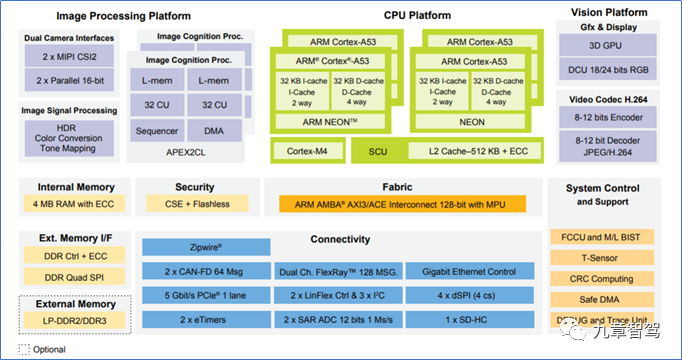
S32V 结构框图(图片来源-NXP官网)
2)NAD 自动驾驶计算平台
蔚来超算平台NIO Adam(由4颗英伟达Orin芯片构成)性能:
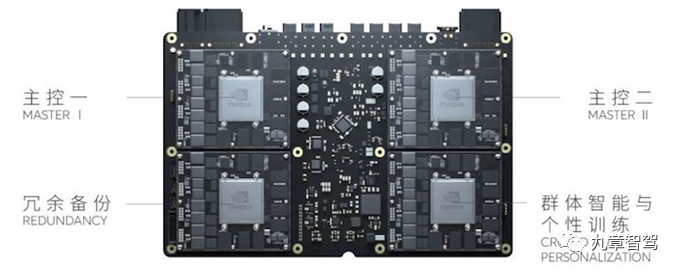
蔚来超算平台-NIO Adam(图片来源:蔚来官网)
4*高性能专用芯片:2颗主控芯片+1颗冗余备份芯片+1颗群体智能与个性训练专用芯片
—— 2主控芯片:实现NAD算法的全栈运算,包含多方案相互校验感知,多源的高精度定位,多模态的预测与决策;充足的算力确保NAD系统能够游刃有余地去处理复杂交通场景;
—— 1冗余备份芯片:任何一个主芯片失效,NAD都可以确保安全
—— 1群体智能与个性训练专用芯片:可以加快NAD的进化进度,同时又可以针对每个用户的用车环境进行个性化的本地训练,提升每位用户的自动驾驶体验;
超级图像处理流水线:超高带宽的图像接口,ISP每秒可处理64亿像素
超高骨干数据网络:将所有传感器和车辆系统的信号输入实时无损地分配到每一算力核心
2.小鹏–自动驾驶系统计算平台
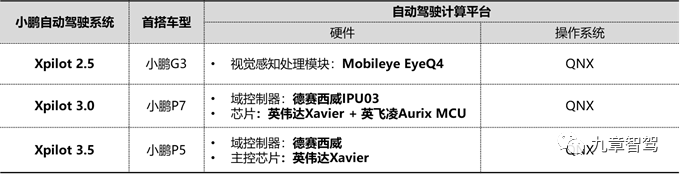
Xpilot系统计算平台信息梳理
1)XPilot 2.5 自动驾驶计算平台
硬件:采用 Mobileye的EyeQ4 模块
EyeQ4芯片:算力-2.5 TOPS,功耗-3W,响应时间-20ms,制程工艺-28nm 芯片类型-ASIC
2)Xpilot 3.0自动驾驶计算平台
Xpilot3.0 计算平台:英伟达Xavier SoC+ 英飞凌Aurix MCU
a.英伟达Xavier SoC:算力-30TOPS,功耗-30W,安全等级-ASIL D, 视频处理器-8K HDR,CPU-定制8核ARM架构,GPU-512核VoltaGPU
b.英飞凌Aurix MCU:(RISC处理器核心、微控制器和DSP整合在一个MCU)
算力-1.7DMIPS/MHz,时钟频率-单核300MHz,制程-40nm,安全等级-ASIL D
通过下面的Xpilot3.0系统的软件堆栈可以看出:
自研部分包括:XPU的平台软件(Xpilot系统架构)以及Xpilot 系统应用层软件:包括OTA、诊断服务、虚拟化、摄像头服务、CAN服务、自动驾驶应用(感知、定位、预测、路径规划等)等
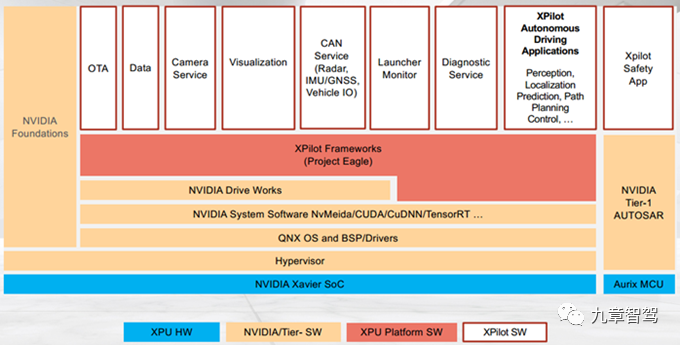
Xpilot 3.0系统软件堆栈(图片来源–小鹏)
3.理想–自动驾驶系统计算平台
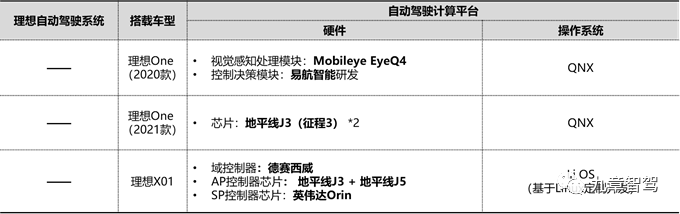
理想自动驾驶计算平台信息梳理
1)2020款理想One搭载的自动驾驶计算平台
图像感知处理模块:采用Mobileye EyeQ4芯片
控制决策模块:由易航智能研发
2)2021款理想One搭载的自动驾驶计算平台
处理芯片:地平线征程3*2

征程3基础参数信息梳理
3)理想X01搭载的自动驾驶计算平台
硬件:
自动驾驶域控制器:德赛西威
主控芯片:SP控制器芯片-英伟达Orin-x
操作系统:理想X01将搭载其自研的实时操作系统Li OS
Li OS基于Linux内核深度定制开发,定制开发的部分包括:a. 内核的文件系统、IO系统和Boot引导等核心部分; b. 与其它应用层通讯的中间件部分;应用层部分则选择与战略供应商合作开发;
四、自动驾驶系统 – 功能实现
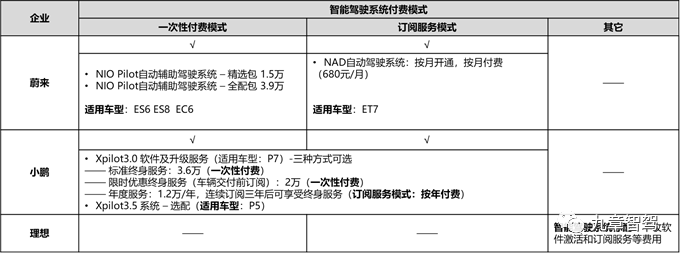
附表3:三家造车新势力智能驾驶系统付费模式对比
附表4:三家造车新势力自动驾驶系统实现功能对比

注:√ 有此配置,×无此配置

1.蔚来–自动驾驶系统功能实现
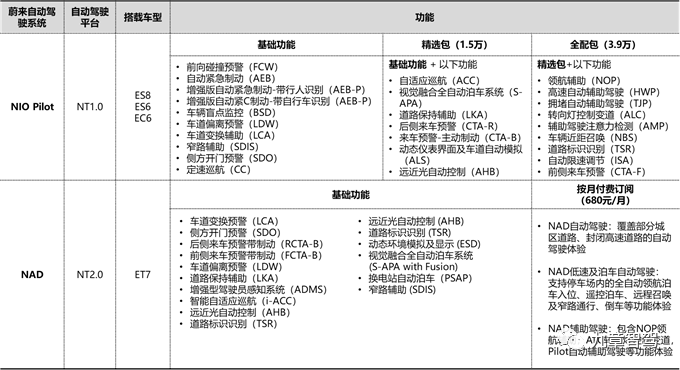
NIO Pilot 和NAD所能实现的功能
1)NIO Pilot系统基础功能免费,对于精选包和全配包采用一次性付费模式;
2)NAD采用按月订阅付费的模式:除一些基础功能外,如果想要拥有NAD的完整功能需采用“按月开通、按月付费”的服务订阅模式,即ADaaS(AD as a Service)。
3)NAD系统会在NIO Pilot系统的基础上,新增一些基于场景的、集成式的高阶自动驾驶类功能:换电站自动泊车,NAD低速及泊车自动驾驶等功能
2. 小鹏–自动驾驶系统功能实现
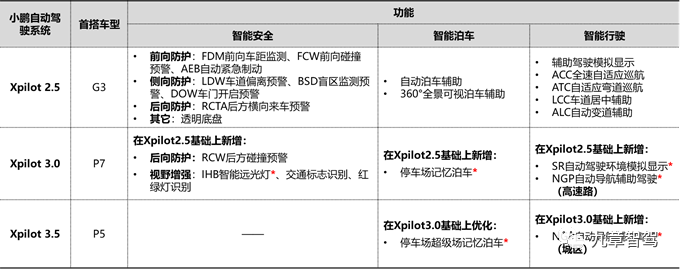
Xpilot系统实现的功能
注:带“*”的功能,属于选配装置,后期订阅付费后可通过OTA升级获取
1)Xpilot 3.0相比Xpilot 2.5:
Xpilot 3.0具备较强软件升级能力,后续通过OTA升级能力可新增:智能远光灯、停车场记忆泊车、NGP自动导航辅助驾驶(高速路)、SR自动驾驶环境模拟显示
2)Xpilot 3.5相比Xpilot 3.0:
稳定性提升:可更好地解决黑夜、逆光、弱光、隧道明暗交替等疑难场景;
新增城市场景NGP-自动导航辅助驾驶功能
提升停车记忆泊车功能体验:在停车场更好应对出入库车辆、对向来车、行人穿梭、连续直角弯等复杂场景
3. 理想–自动驾驶系统功能实现
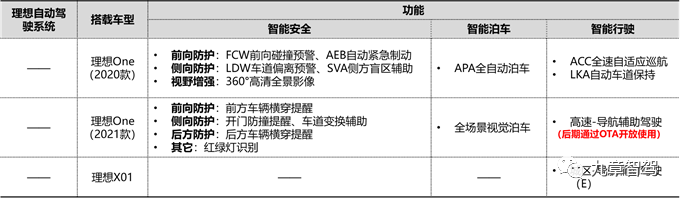
理想-自动驾驶系统实现的功能对比
1)2020款理想One:主要是实现L2级驾驶辅助功能,在L2+高级别驾驶辅助功能上有所欠缺;
a. 由于车辆没有配置能够监控车辆后方的长距离传感器,比如说毫米波雷达或侧后视/后视ADS摄像头,因此在快速行驶时车辆后方防护能力较弱;较难以较好地实现车辆后方碰撞预警、并线辅助以及自动变道等功能;
b. 前向传感器的感知能力具有一定的局限性
在2020年理想One接连发生追尾大货车的事故,这些事故原因主要有以下两种情况:第一:理想One当时开启了辅助驾驶功能,但前车侵入本车道1/3-1/2时,ADAS仍未识别前车;第二:理想One的辅助驾驶感知传感器对侧前方车辆识别能力较差,对于在光线弱的黑夜更是形同虚设。
因此,除了软件算法因素之外,传感器前向感知能力的局限性也是另外一个重大原因,首先2020款理想One的前置摄像头是单目,且视场角为52°,并且车辆两侧也没有布置角雷达,对于光线较弱的情况下感知能力较差,因此对于侧面快速插入的车辆识别较晚。
因此2021款理想One自动驾驶系统相关硬件配置的升级也自然是情理之中的事情了。
2)2021款理想One:前置摄像头采用800万的高清摄像头,水平视角120°,并且增加了4个角雷达,增强了对后方以及前方两侧中长距离目标物体的感知能力;相比老款理想One,增加了红绿灯识别功能、前方车辆横穿提醒、后方车辆横穿提醒、开门防撞提醒等功能;
结语
1. 从三家造车新势力的自动驾驶研发规划及自研布局来看,他们的战略布局方向较为一致,均是想要打造全栈自研的自动驾驶能力;因为未来车型的硬件将会趋同,企业的软件能力或者说软硬件一体化能力将是其核心壁垒;
2. 在未来高阶自动驾驶的感知解决方案上,三家造车新势力均将采取激光雷达+毫米波雷达+摄像头多种传感器冗余感知的“强感知”路线;但自动驾驶技术的进化,除了要软硬结合外,数据更是关键,只有不断积累中国复杂路况下的本土用户数据,持续优化软件算法,才能打造出差异化的自动驾驶体验;中国本土企业更了解中国特色的道路场景,中国用户的驾驶习惯,所以有机会能更先一步迭代出在中国场景下体验更好的自动驾驶技术;比如适用中国道路下的一些特色功能:加塞预警、夜间超车提醒、大货车规避等;
3. 在自动驾驶计算平台方面,蔚来、小鹏、理想三家早期均是选择较为封闭的Mobileye解决方案,导致其难以有效获取和利用底层视觉数据,因此后期纷纷转向选择与开放程度更高的英伟达合作;未来有实力的企业将形成AI芯片自研+自动驾驶域控制器自研(合作开发)的研发模式,如此模式,再结合自研的软件算法,能够充分发挥出自动驾驶计算平台的最优性能;
4. 在量产车型的功能实现方面,更加注重用户具体使用场景的落地;从用户场景出发,逐步实现停车、高速、城区三大场景下点到点的自动驾驶;
5. 当前自动驾驶技术处于不断迭代发展的阶段,OTA可以实现车辆软件快速迭代,进而能够持续为已经交付给用户的车辆增加新的功能或优化现有功能;但新功能的OTA也是跟硬件强相关的,如果硬件不支持,单靠软件照样无法实现。但现在量产车型上安装的硬件大都还无法做到一步到位,OEM只能凭各自的实力尽力而为-“能向前兼容,尽量向前兼容”。
备注:
1)跟作者交流请添加作者企业微信号(扫描下方二维码);加微信前请务必说明自己所在公司、岗位及真实姓名,否则无法验证通过,多谢理解。

2)如果您有兴趣给《九章智驾》投稿(“转型经历总结”及“知识积累整理”两个方向),请扫描以下二维码加孙利的企业微信。加微信时务必备注您的真实姓名及岗位等信息,谢谢。

推荐阅读(超连接):
我们的个人命运,三分靠打拼,七分靠产业红利——《九章智驾》创刊词
参考资料:
1. 蔚来NIO全新的自动驾驶系统NAD解析
https://mp.weixin.qq.com/s/NKc0cP6Fc_xRlp-ui4lc7A
2. NIOPilot 领航辅助:如何定义全球第二?
https://www.bilibili.com/read/cv7878209/
3.比特斯拉更稳重 抢先体验蔚来NOP领航辅助驾驶
https://www.sohu.com/a/423524857_118021
4.蔚来公布自动驾驶进展:放弃纯视觉路线,做多传感器融合
https://www.sohu.com/a/301101089_256868
5. 蔚来NIO自动辅助驾驶Pilot升级之路(附超全功能详解)
https://mp.weixin.qq.com/s/QiS0e6Yye54IIYRtvi_C-A
6. 从2019的PPT,再探小鹏P7的自动驾驶(XPilot3.0)
https://zhuanlan.zhihu.com/p/148570354
7.从G3到P7,2.5到3.0,小鹏 XPILOT 高级辅助驾驶系统进化史
http://www.evask360.com/article-996.html
8. 小鹏自动驾驶副总裁:自动驾驶、系统架构领航功能演进及P7案例分析
https://www.sohu.com/a/355060121_99957909
9. ICA智能巡航辅助开放 小鹏G3智能驾驶进入L2级时代
https://www.sohu.com/a/320206563_117727
10.从G3到P7,2.5到3.0 小鹏XPILOT高级辅助驾驶系统进化史
https://mp.weixin.qq.com/s/tOZouR8t_-Ixlg4CN9y3TA
11.一张图概览小鹏P7供应商
https://mp.weixin.qq.com/s/jG7sz8GGgtaXnzdE4h6Lyw
12.小鹏P7OTA升级说明会核心信息
https://zhuanlan.zhihu.com/p/347364948
13.成功率99.99%,小鹏披露OTA关键数据,即将推送新功能令人惊喜
https://mp.weixin.qq.com/s/SW3qXhVWJnNG0kJqhl0b9w
14. 从诺基亚到新造车,一位首席架构师决定投身“理想”
https://zhuanlan.zhihu.com/p/254823116
15.对话理想 CTO 王凯:解密 2025 自动驾驶企业的入场门票
https://zhuanlan.zhihu.com/p/256204278
16.豪威集团全方位车载视觉解决方案,为理想 ONE 汽车装上智能驾驶之“慧眼”
https://mp.weixin.qq.com/s/TRNG0UOhDJywQbUZo9rKCA
17.如何看待理想 ONE 自动辅助驾驶系统?
https://www.sohu.com/a/337831069_607980
18.李想首度公布理想汽车自动驾驶路线图
https://mp.weixin.qq.com/s/wWQhZIdchK1i_X4pZkjSZQ
19.李想的「爆款」战略:探索用户需求的本质,并不是以用户为中心
https://mp.weixin.qq.com/s/UMEBONbjyGKGufk3F2R04g
20.拥有豪华硬件配置 理想 X01 配置疑似曝光
https://chejiahao.autohome.com.cn/info/8765333
21.理想ONE再次追尾大货车!警方已发通报称理想ONE全责
https://mp.weixin.qq.com/s/vMpB16HF_UyuvTbd_6ViUw