国际汽车工程师学会(SAEInternational)于2014年发布了自动驾驶的六级分类体系,美国国家公路交通安全管理局(NHTSA)原本有自己的一套分类体系,但在2016年9月转为使用SAE的分类标准。今天绝大多数主流自动驾驶研究者已将SAE标准当作通行的分类原则。
SAE标准将自动驾驶技术分为0级、1级、2级、3级、4级、5级,共六个级别。具体的级别划分和描述如下页图表99所示:
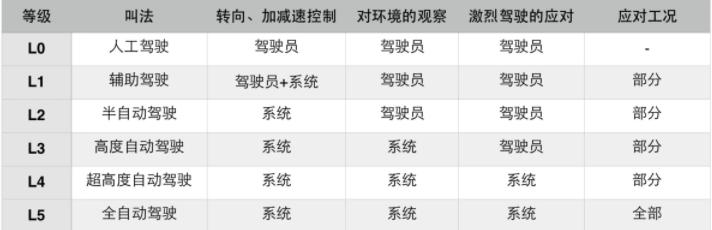
L0所指的是预警和少量保护辅助功能,主要包括夜视(NV,Night Vision),行人检测(PD,Pedestrian Detection),交通标志识别(TSR,Traffic Sign Recognition ) ,车道偏离警告(LDW,Lane Departure Warning) ,盲点监测(BSM,Blind Spot Monitoring ),后排平交路口交通警报(CTA,Rear-Cross Traffic Alert R)这类预警功能。系统只会向驾驶员给出警告,人的手(转向)、脚(刹车)仍然控制车辆。
L1阶段车辆开始介入制动与转向其中一项控制,分担驾驶员的工作,主要有自适应巡航(ACC,Adaptive Cruise Control)、车道保持功能(LKA,Lane Keep Assist)紧急制动刹车(AEB,Automatic Emergency Braking)等功能。
L2阶段车辆开始接管纵向与横向的多个控制,但驾驶员需要监控驾驶环境也就是说司机注意力仍然要保持驾车状态,出现问题时以便随时接管车辆。L2和L1,最大的区别就是对转向的控制上,横向和纵向系统需要进行融合。在这个层级,自动系统的错误感知和判断有驾驶员随时纠正,大多数车企都能提供这个系统。L2 可以通过速度和环境分割成不同的使用场景,如环路低速堵车、高速路上的快速行车和驾驶员在车内的自动泊车;
L3 :自动系统既能完成某些驾驶任务,也能在某些情况下监控驾驶环境,但驾驶员必须准备好重新取得驾驶控制权(自动系统发出请求时)。所以在该层级下,驾驶者仍无法进行睡觉或者深度的休息。在 L2 完成以后,车企的研究领域是从这里延伸的。由于 L3 的特殊性,目前看到比较有意义的部署是在高速 L2 上面做升级。代表车型为搭载特斯拉的Autopilot1.0系统的Model S、Model X。但是不错并不是很好,毕竟Autopilot系统还是掉过几次链子,比如在阳光照射下,直接装上白色大货车的,有直接撞马路牙子的。在恶略天气也是不推荐使用的。第2级技术和第3级技术之间,存在相当大的跨度。
L4 :自动系统在某些环境和特定条件下,能够完成驾驶任务并监控驾驶环境;L4的部署,目前来看多数是基于城市的使用,可以是全自动的代客泊车,也可以是直接结合打车服务来做。这个阶段下,在自动驾驶可以运行的范围内,驾驶相关的所有任务和驾乘人已经没关系了,感知外界责任全在自动驾驶系统,这里就存在着不同的设计和部署思路了;
L5 :自动系统在所有条件下都能完成的所有驾驶任务。
我们所说的自动驾驶系统(ADS),通常是在 3~5 层级,随着层级的提高,对系统的要求也随之提高。由于目前自动驾驶的分级,特别是 L3 和 L4 处在还没有大规模应用在实际生活之中,我们对待这个需求就存在着一些认知上的争议。