本文转自:http://www.cheyun.com/content/10421
自动驾驶分级傻傻分不清,是大家普遍存在的问题。这里我根据分级标准文件,重点谈一下我的看法。NHTSA(国家高速路安全管理局)和SAE(国际汽车工程师协会)的自动驾驶分级可以分别在官网下载,下面是一个中文版两个等级的汇总表格。

△图1 分级的中文参考
等级0 无自动化水平
如果是驾驶员控制,哪怕你有各种警告,我们也可以列举一排现阶段还没介入的ADAS功能,这些也都在等级0里面。
此等级的特点:只有环境感知,功能目的是辅助增强驾驶员对环境和危险的感知能力。
驾驶员操作:如图2所示,方向盘、油门、刹车一个都不能少。
现有车辆主要的功能体现:
1.夜视 Night Vision(NV)
2.行人检测 Pedestrian Detection (PD)
3.交通标志识别 Traffic Sign Recognition (TSR)
4.车道偏离警告 Lane Departure Warning (LDW)
5.盲点监测 Blind Spot Monitoring (BSM)
6.后排平交路口交通警报 Rear-Cross Traffic Alert (RCTA)

△图2 驾驶员的操作概览
等级1 特定功能的自动化
驾驶员完全主导。车辆会介入控制1项或者多项。多项功能同时出现的时候,这些功能是工作是分开的。驾驶员可以放弃部分控制权(方向盘、油门&刹车之一),给系统来接管。
此等级特点:此项是大部分公司目前在做的,大部分的功能都是单独一个ECU来开发。
驾驶员操作:如图3所示,在ACC情况下,油门和刹车不用;在AEB情况下,刹车可不用(这里不刹车不代表不碰撞,伤害小一些)。
现有车辆主要功能体现:
1.自适应巡航控制系统 Adaptive Cruise Control (ACC)
2.自动紧急制动 Automatic Emergency Braking (AEB)
小结:所以L1和L0之间的距离,就是介入整车控制的过程,L0只有感知给驾驶员报警,L1需要帮助驾驶员来在一个横向或纵向驾驶车辆,注意这里的横向和纵向两个功能是分开的。

△图3 L1一般是分布式架构
以LKA车道保持辅助系统为例,在驾驶员注意力不集中或疲劳驾驶出现车辆偏转时,系统进行主动修正、转向干预,当检测到驾驶员操作转向信号灯时,系统进入被动模式,如上图4所示其系统架构是放在独立的系统ECU里面完成的,与其他ACC控制器不相关。
等级2 组合功能
驾驶员和汽车来分享控制权。系统同时具有纵向和侧向的自动控制,且具备两项以上。驾驶员可以放弃主要控制权,驾驶员需要观察周围情况,并提供安全操作。驾驶员必须随时待命,在系统退出的时候随时接上。
此等级特点:系统需要进行融合,需要两个ECU进行配合,系统之间进行高度耦合。
驾驶员操作:只要用眼睛看就行,在某些时候车辆自己可以运行。
这里的核心问题,是由于系统的不够智能或者没办法提前预知自己不行,退出的警告时间非常短
小结:L2和L1的区别,主要就是系统工作,驾驶员在系统能工作的时候,只要用眼睛就可以了。

△图4 L2需要进行融合,处理决策需要多输入
以丰田AHAC公路自动驾驶辅助(Automated Highway Driving Assist)系统为例。该系统由两个子系统组成,分别为协作自适应巡航控制(Cooperative-adaptive Cruise Control)和车道跟踪控制(Lane Trace Control),开启过程中驾驶员可以完全脱离方向盘,系统可利用无线电自动调整车速及车距,这里是分布式系统往融合式系统前进了一步。
等级3 有限度的自动驾驶
在某些环境条件下,驾驶员可以完全放弃操控,交给自动化系统进行操控。如果系统需要人员做一些操作,驾驶员偶尔来帮下忙。驾驶员不需要全身关注看车外的情况。
此等级特点:系统某些条件下完全负责整个车辆的操控了
驾驶员操作:系统需要提示帮忙的时候回来,其他时候可以放松;当系统不行的时候,需要驾驶员来帮助
小结:L3和L2的区别,就是不需要驾驶员时时刻刻盯着,系统需要高度的鲁棒性,在特定工作的情况下,系统不允许退出。
下图5是AUDI的zFAS,基本上把好几个模块都放在一起,形成了完整的控制系统,包括整套中央数据(地图合成和环境合成目标)、驾驶决定以及驾驶规划。硬件上把控制器内部的一堆设备进行整合,主要是由多个芯片单元所组成。由此可见L2到L3核心上的突破是容纳决策的控制器,这算是一个决定性的跨越和壁垒,也是一般车企不投入大量资源很难突破的。

△图5 AUDI zFAS的域控方案
△图6 AUDI zFAS的域控框架
等级4 全自动驾驶
只要输入出发地和目的地,责任完全交给车辆端。
英国的工程机械技术公司里卡多的PPT里面,给了一个L2到L4的自动驾驶参考路径。

△图7 L2~L4进化图
我们拿典型的L2等级高级辅助驾驶,作为例子。比如ACC自动巡航和LKA车道保持(它的前置路径是LDW车道保健配上EPS接入方向)。如果将这两个功能合在一起控制,其本身就需要算法的和控制的强耦合。而从L2到L3之前,则需要高功能安全等级的控制器、实现人类驾驶决策功能的AI功能,以及与驾驶功能安全相关的车联网V2V和车联系统支持。L3到L4则需要高精度的地图和各种路谱扫描能力强的感知系统来做支持。
小结:各个阶段的晋级并非那么简单,需要的评估测试如下图所示。
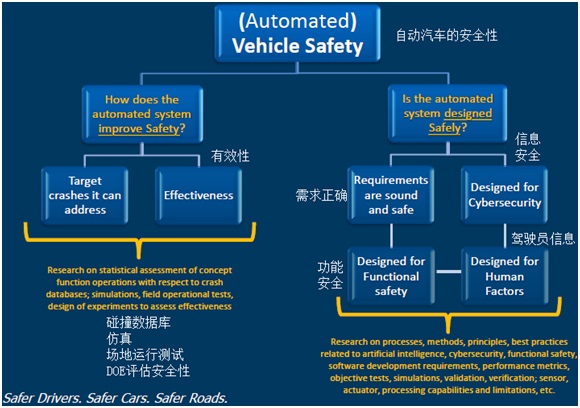
△图8 自动车辆安全性评估
从测试验证角度来讲,对L1等级的功能,完成本级安全性和测试方案以及效果即可得到验证。而更高阶的系统安全性和有效性,需要长期接受挑战和迭代。测试验证时,需要从L1开始一层层往上逐级测试,然后再通过大量的系统性的组合再测试保证安全性。L1→L2→L3不存跳跃测试这种方法,除非对整个系统结构进行重构优化,但是验证路径还是采取的逐步完成和实施的。