前言
在上篇教程中,基于运动学模型和dlqr离散时间线性二次型调节器原理搭建了轨迹跟踪的demo,恰好家里有一块树莓派,于是我突发奇想,把控制算法刷写进树莓派中,然后通过和Matlab/simulink的通信,Simulink中跑车辆模型。这样一个简单的验证平台就可以搭建起来啦。前提是这样的平台是完全不具备产品化的试验价值,该上Labcar或者Simulator的就上,由于个人买不起“大冰箱”,就自己搭建个简易的玩一玩,因此本次教程适合个人业余玩家,职业玩家谢绝参赛。本次教程只谈过程,细节问题不会描述的十分详细,有问题可以在下方评论区讨论。
一、实验准备
1.安装Ubuntu和Ros的树莓派开发板一块;
2.安装Matlab/Simulink的电脑一台;
3.网线,u盘等其他外设。
我对这类控制器在环仿真平台的搭建有两种理解。一种是带ROS的,一种是不带ROS的。我分别用两种架构图描述一下。
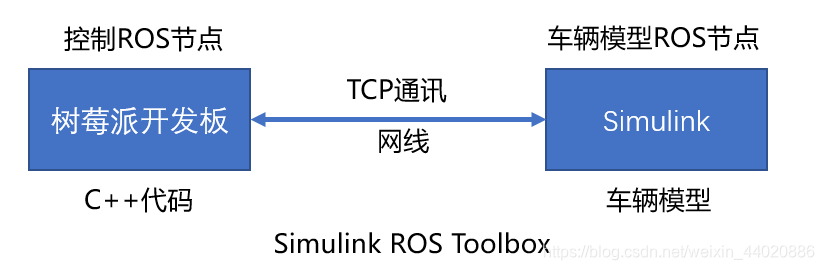
上图也是本次实验需要用到的,核心就是ROS架构。Matlab和树莓派都运行ROS。Matlab跑win,树莓派跑ubuntu。两个硬件用网线连接。需要您按照Matlab ROS工具箱。
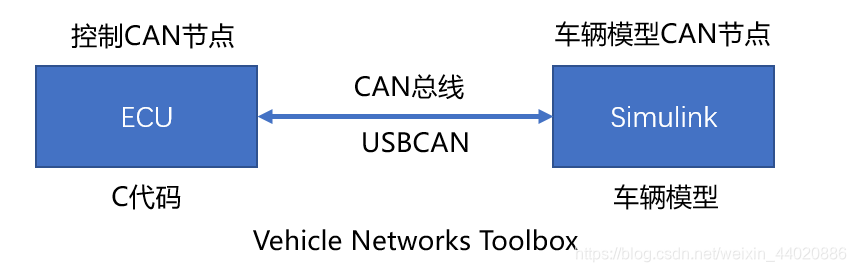 上图是第二种我也会用到的一种架构。对于普通单片机跑C代码,通过USBCAN(Simulink仅支持以下四家的CAN设备:Kvaser;Peak;Vector;NI)接入电脑,使用Simulink车辆通讯工具箱完成CAN或者CANFD通讯。如果你使用Instrument Toolbox也可以使用RS232,TCP,UDP通信。这个看您的单片机通讯接口了。我平时会用到PCAN,这个相对来说便宜点。当然你也可以反向做快速原型操作,只是Matlab是非实时的,验证一下大致控制策略是没有问题的。
上图是第二种我也会用到的一种架构。对于普通单片机跑C代码,通过USBCAN(Simulink仅支持以下四家的CAN设备:Kvaser;Peak;Vector;NI)接入电脑,使用Simulink车辆通讯工具箱完成CAN或者CANFD通讯。如果你使用Instrument Toolbox也可以使用RS232,TCP,UDP通信。这个看您的单片机通讯接口了。我平时会用到PCAN,这个相对来说便宜点。当然你也可以反向做快速原型操作,只是Matlab是非实时的,验证一下大致控制策略是没有问题的。
二、具体实施
1.Ubuntu ROS和Matlab通信
网络上许多教程都讲过如何进行ROS和Matlab的通信。为了大家看得懂,我就再讲一次如何连接。
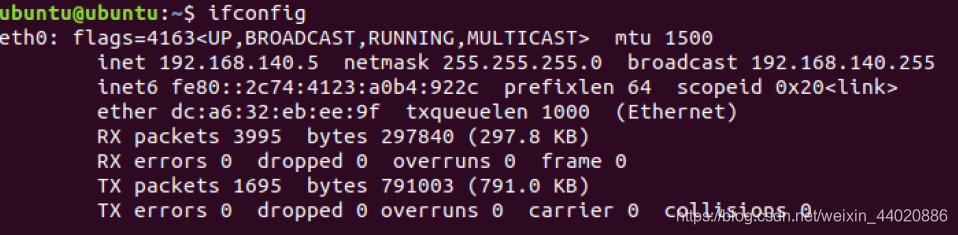
首先用网线将树莓派和笔记本电脑连上,在树莓派的终端输入:ifconfig 即可查看树莓派的ip地址。
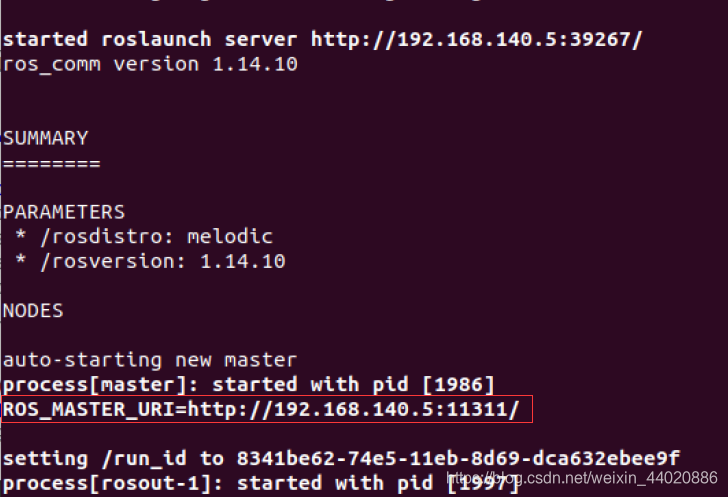
其次,在Home界面下键入 Ctrl +H 显示隐藏文件,双击打开 .bashrc 文件,在最后一行输入树莓派的IP地址,保存文件,退出终端。新建终端键入:roscore 启动ROS,观察ROS_MASTER_URI是否是树莓派IP,红框所示。

以上就完成了树莓派的操作。下面打开Matlab,输入以下代码,将树莓派作为主节点,Matlab作为从节点。

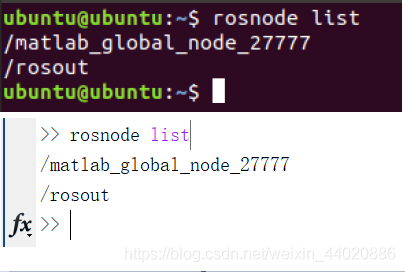
从图片可以看到Matlab与树莓派已经完成了通讯。无论从Ubuntu还是Matlab,都可以看到节点信息。
2.控制算法部署树莓派
下图即在上篇博客中搭建的轨迹跟踪控制算法,我将模型只留出控制算法部分,因为此部分才是刷写进实际控制器中的。
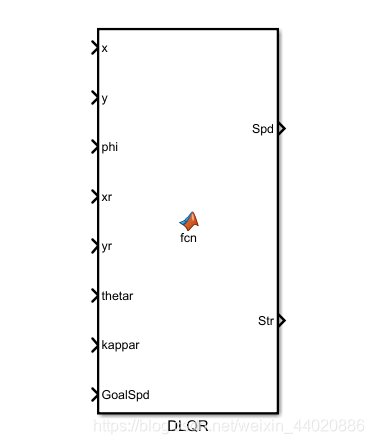
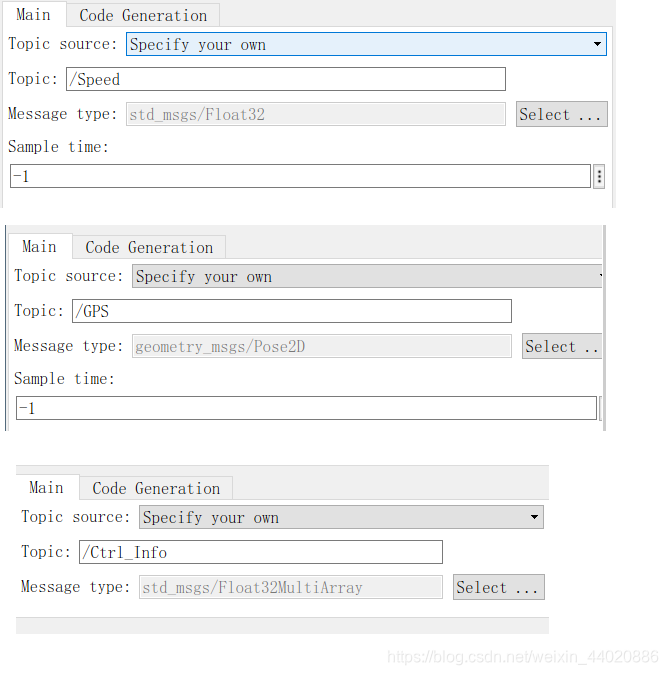
那么结合Simulink ROS工具箱,新建几个Topics,Message type选择ROS自带的。通过一顿操作即可完成下面的匹配,从下图可以看到。参考路径xr,yr,kr,thetar的数据保存在Model Workspace中。整个模型目前有三个话题。控制算法订阅了GPS话题(x、y、横摆角)和Speed(期望车辆行驶速度)话题,并且发布了Ctrl话题,其中包括速度和前轮转角数据。
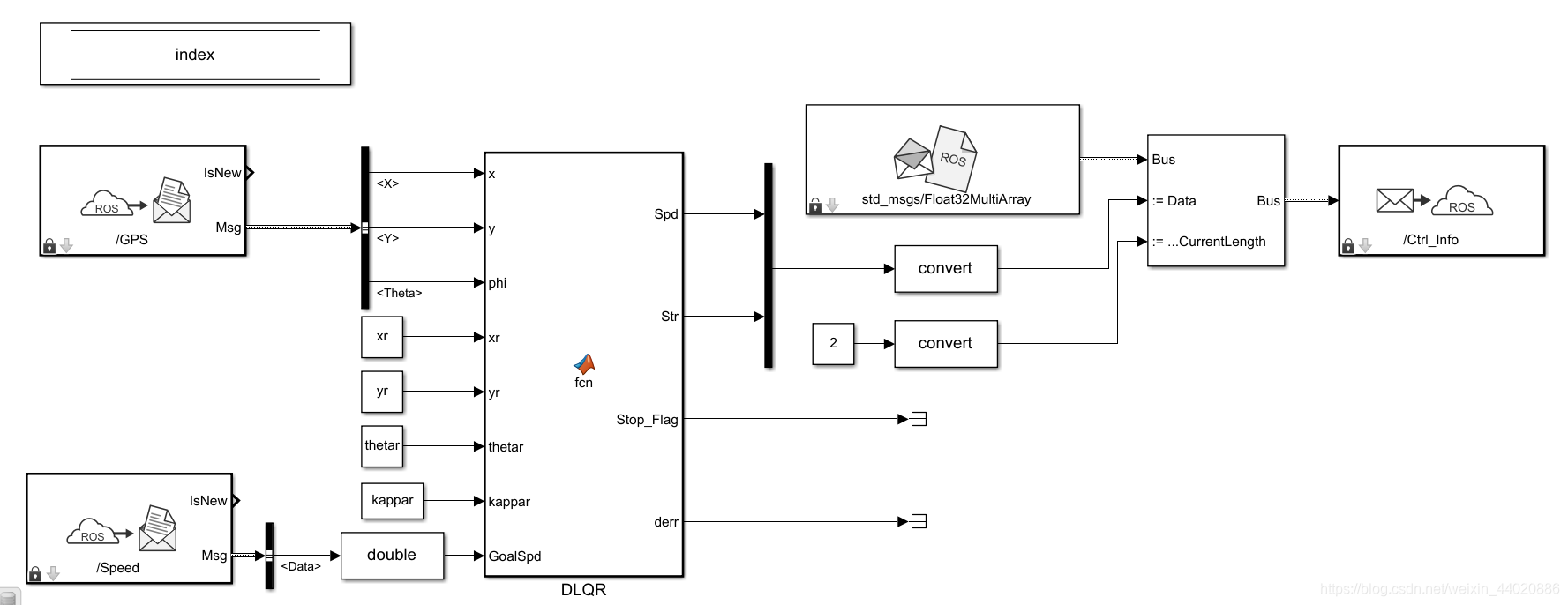
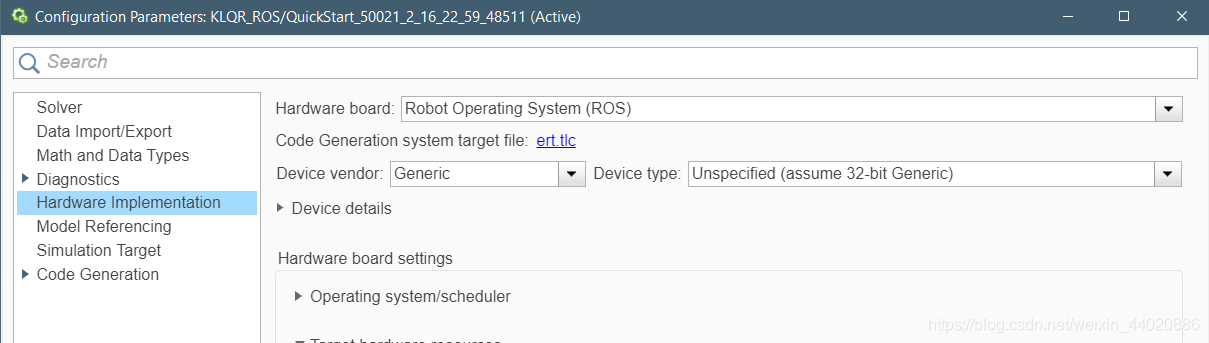
如果您没有用过Simulink ROS toolbox,你可能对上面的模型不理解,建议跟着看两个简单的Examples就可以熟悉了。接下来,就需要对该模型进行C++代码生成,需要您的Simulink中有Embedded Coder工具箱。进入设置界面,进入Hardware Implementation 选择Hardware board为ROS。当然这里您用ROS2也是可以的。
然后回到模型界面,直接ctrl+B编译模型,等待编译完成(注意:如果您将树莓派作为主节点,请确保树莓派系统已经完成了roscore,不然会报丢主节点错误)。模型编译完成,会弹出代码生成报告。当然你不做SiL测试直接用代码也行,毕竟是个人玩家,不那么讲究。在你的Matlab工作目录下会出现一个tgz后缀的压缩包,名字和模型名字一样。
这里面就是节点代码,将这个压缩包解压到该名字的文件夹里,拷贝到U盘中,直接放入树莓派ROS工作空间的SRC源文件目录下。如下图所示,可以看到我的工作空间就这一个文件夹。
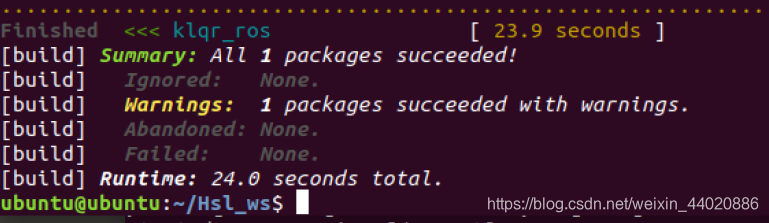
然后,编译该源文件即可。在工作空间输入 catkin build 即可。

等待片刻,可以看到已经将代码完成编译。报错是不会报错的,因为模型是正确的,这一点Matlab还是做得非常完美的,就是强(尬吹一下)。
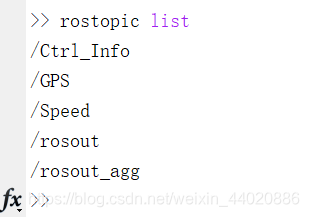
编译完成过程,设置环境变量后,直接rosrun即可。接下来,节点就run起来,那么在matlab中输入 rostopic list就可以看到树莓派发布和订阅的话题了,至此在树莓派上的工作就全部完成了。

3.Simulink车辆模型环境
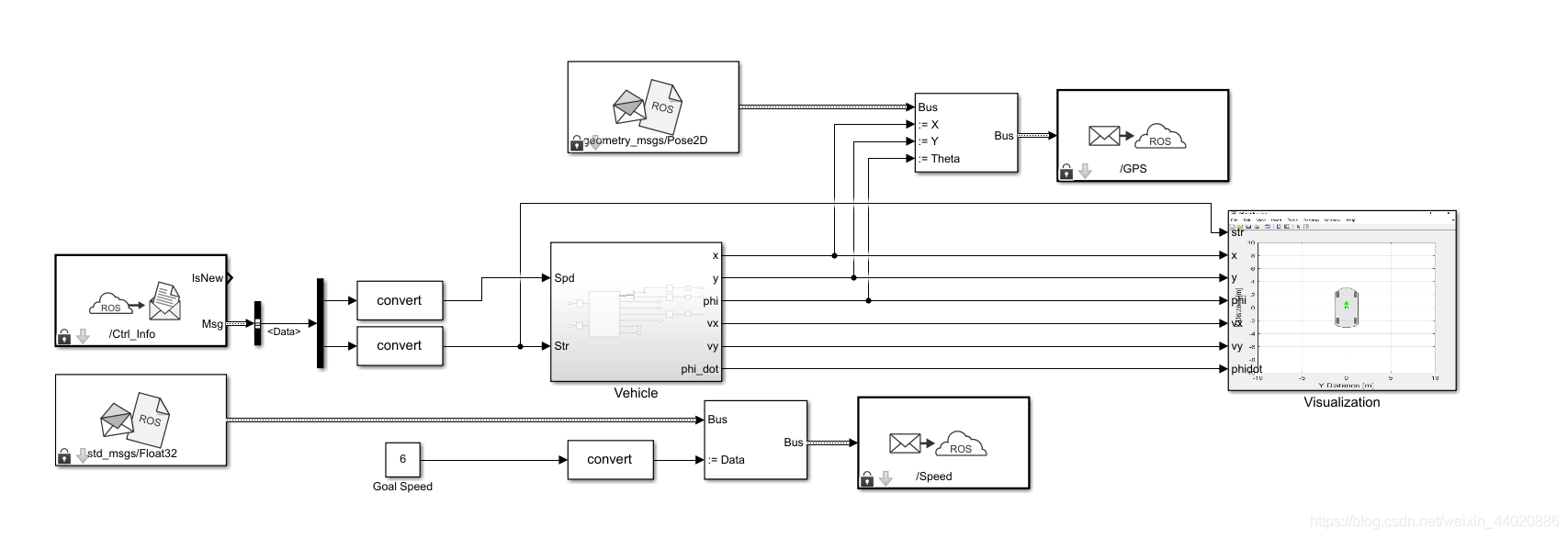
在此需要郑重声明下,Simulink不是实时仿真,TCP传输也会有延迟,所以验证算法只能说可以做,但是完全达不到实时的工业级别要求。既然树莓派发布了Ctrl话题以及需要订阅GPS话题和Speed话题(树莓派需要期望车速,那么车辆模型就需要提供接口,这里的模型用prescan也好,carsim也好,车辆动力学工具箱也好,都是可以的。将ROS订阅和发布匹配树莓派ROS即可。车辆模型我用了上一篇博客的车辆动力学工具箱模型,为了省事。下图就是搭建好的模型了,已经完全匹配了ROS节点。
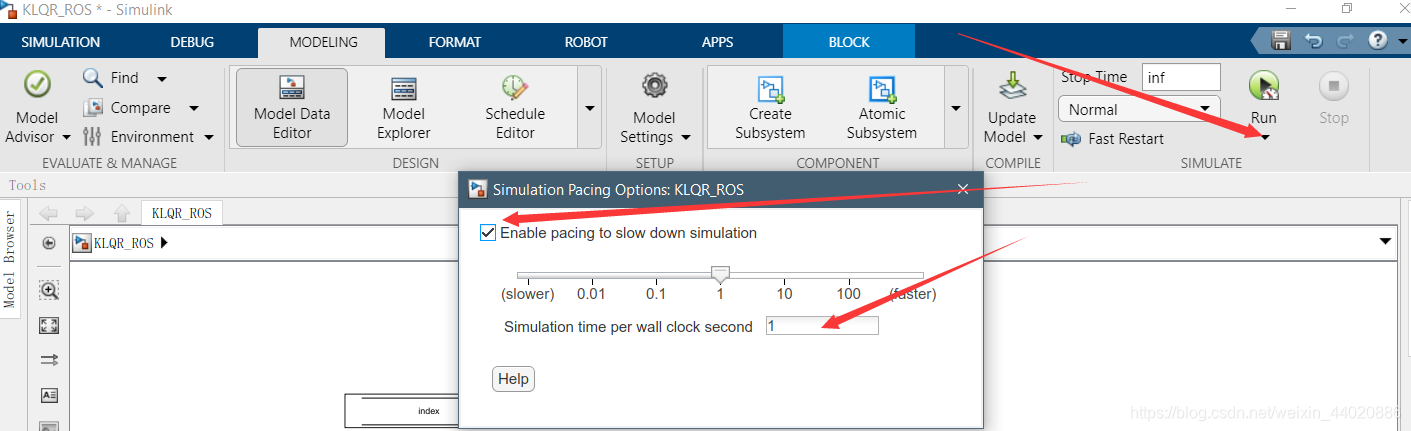
需要注意的是:Simulink仿真中可以实时,需要Simulink real-time 工具箱中的模块,我的2019b没有此工具箱,就通过以下方式,使仿真和实际同步,这个原则就是在Simulink能计算得过来的时候同步,算不过来了还是同步不了,就会很慢。
搭建完成后,直接run起来就可以了。可以看见车辆还是按照期望轨迹跑了起来。我将硬件在环的仿真结果和离散仿真的实际结果进行了对比。
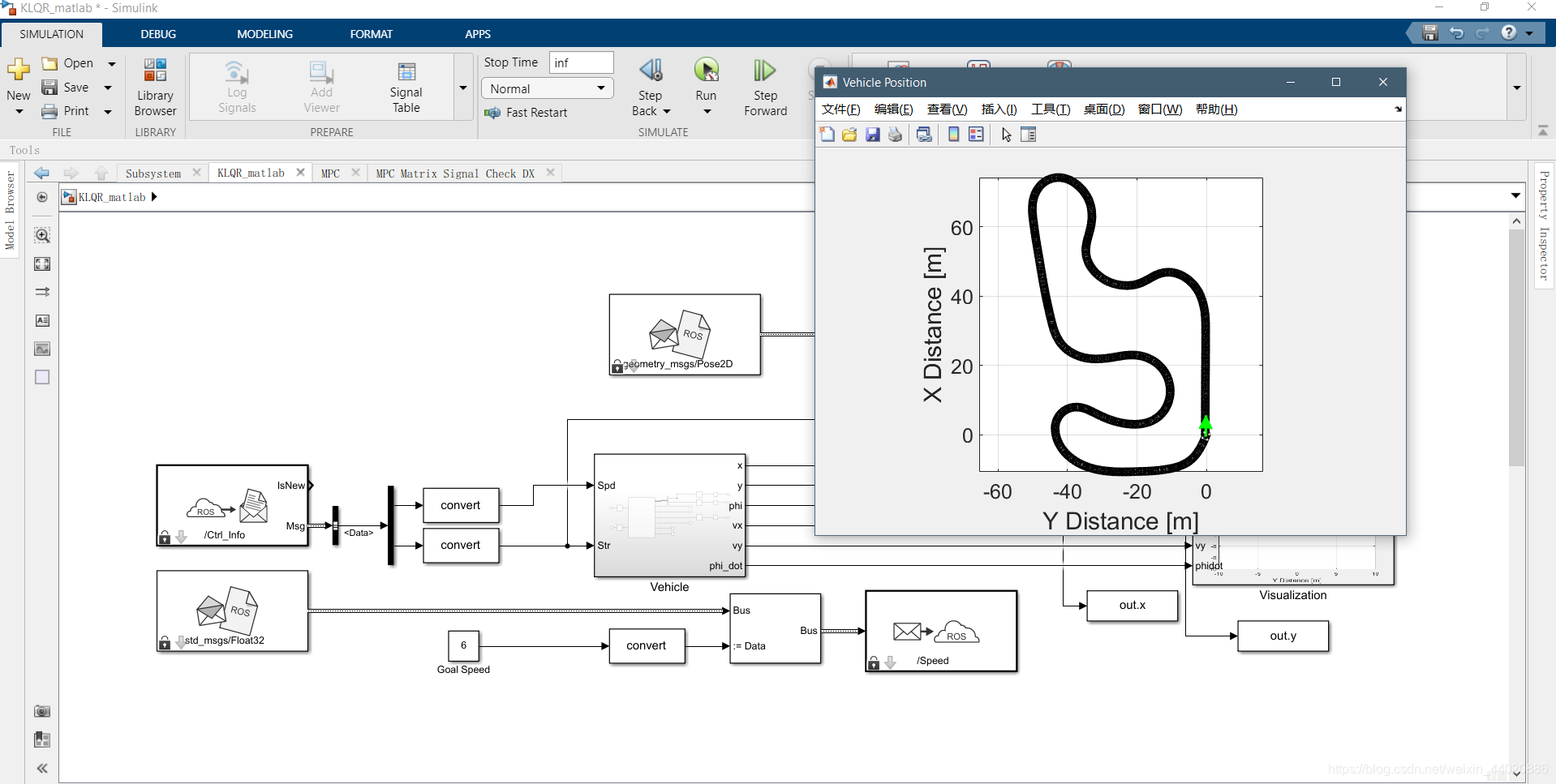
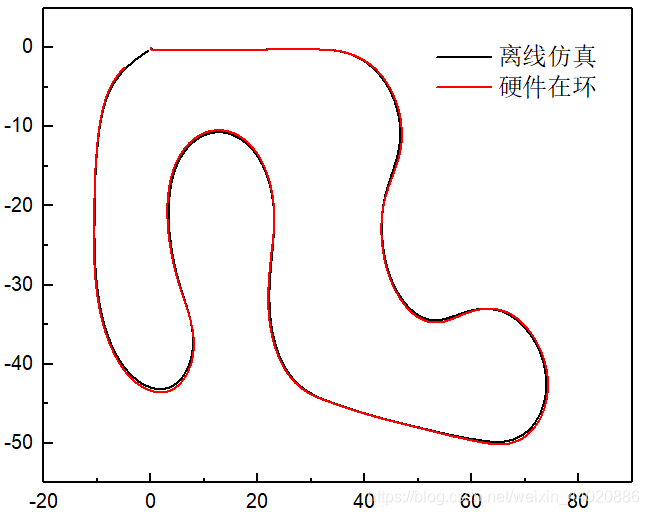
为了考虑树莓派的实际性能,我将控制周期设置为了50ms,并且黎卡提方程最大迭代次数为1500。离线仿真用的是10ms,黎卡提方程最大迭代次数为5000。可以看见,轨迹还是有差别的,具体因素太多了,这里就不一一分析了。
总结
本文针对个人玩家搭建的硬件在环平台,适用人群为个人玩家或者我这种在校学生用来做快速验证的。树莓派作为一款性能还算不错的嵌入式设备(比Arduino性能好多了)还是值得一用的,Jetson Nano也很好,Matlab也支持GPU代码生成直接部署。搭建这样简单平台的难点就在你能不能熟练地在Matlab环境下使用ROS工具箱,也大致浏览下help就可以快速上手。如果您将罗技G29或者游戏手柄装上,就可以实现驾驶员和控制器都在环的仿真啦!如果您对本次分享有疑问,评论私信交流。