1、
AutolaborOS 基于
Ubuntu Mate和ROS Kinetic,增加web管理
2、 Autolabor 1
软件结构:
Arduino Mega 2560 主要运行PID程序,负责执行串口收到的指令,控制马达以指定速度旋转,同时对编码器计数,向上层软件报告轮胎实际转动脉冲数.
详细功能可以参考此部分源代码,位于U盘 Arduino 源代码目录中.
Raspberry Pi 3
为机器人主要软件环境平台,内部运行Linux系统Debian发行版,在这之上运行Indigo 版本 ROS系统, 实现机器人所有功能.
诸如控制底盘运动,SLAM,导航各功能,均以软件包的形式,运行在ROS系统之上. 通过一个Launch文件可以将各功能模块配置在同一个启动文件内,实现需要彼此配合的功能.
http://wiki.ros.org/roslaunch
PC 并不是必须的部分,在Autolabor1中,此部分主要作用是运行ROS工具软件rviz用以观察SLAM输出的地图以及指示导航目标. 您完全可以通过二次开发, 将此部分功能移植到手机上或者省略(例如自行指示目标)
由于ROS是一个分布式的系统,只要所有ROS节点连接在同一个Core上,无论功能包运行在哪个硬件上(Raspberry Pi 或者 PC) 对于系统来说并无差别.
3、
A
utolabor 1 硬件
结构:
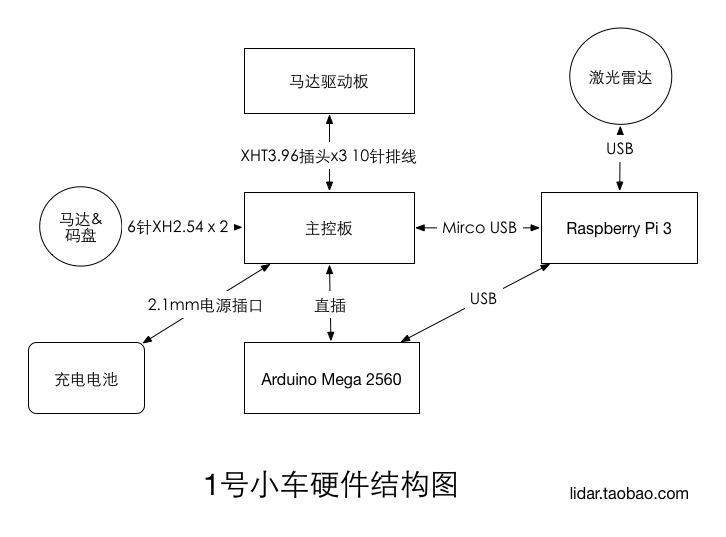
主控板
并没有芯片元件,只起到转接的作用,直插在Arduino Mega 2560之上.
电池 为12.6V 6800mah 锂离子聚合物电池,正常情况可以使用1-2小时. 如需更换更大容量电池,可以到此店铺选用,可兼容适用.
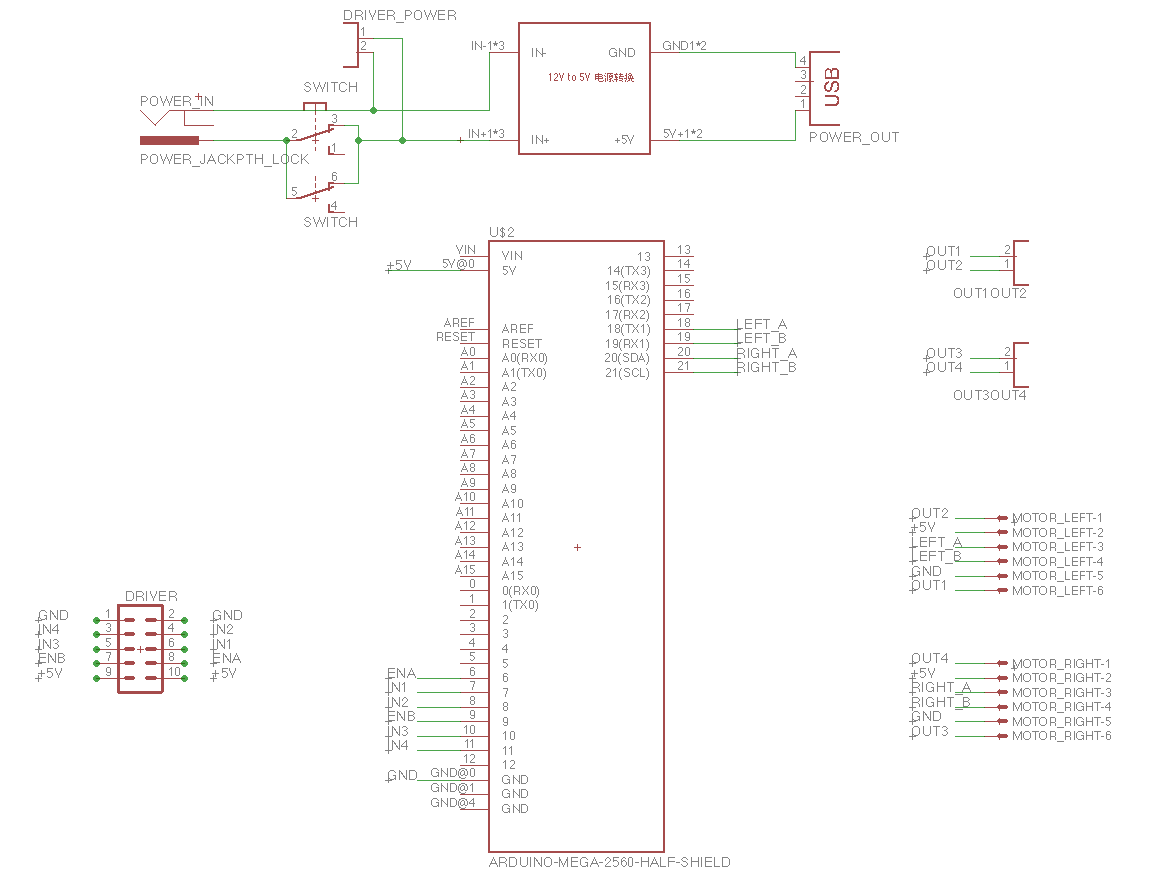
电路原理图:
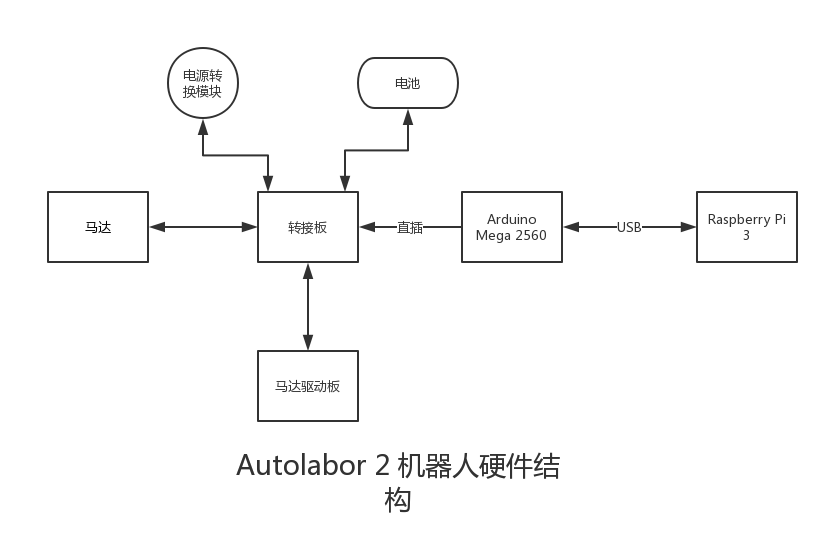
2、Autolabor 2



ROS底盘使用说明:
ros_arduino_python,此ros包和小车通讯。
另需ros_arduino_bridge
teleop_twist_keyboard 键盘控制
ls/dev指令确定arduino在raspberry的串口地址(虚拟)。修改权限
底盘配置:https://v.qq.com/x/page/z0506x9q8yn.html?start=519
自定义底盘使用:
小车通过串口指令控制,3个命令:
1、指定轮子按速度旋转:m 左轮速度 右轮速度: m 100 -50
2、读取编码器数据:e
3、重置,清零编码器:r
USB线连接arduino控制板及PC,PC使用串口工具发送指令。
硬件介绍:
Raspberry Pi 3b开发板提供
4个USB接口
移动部分
Arduino Mega 2560开发板搭载PID算法结合马达上的霍尔传感器,可以精确控制轮胎旋转速度.同时Arduino还会提供ROS系统所需要的里程计信息。
驱动部分采用双路180W大功率驱动器,单路可以提供最大80W驱动能力,具有较大的驱动冗余。

硬件介绍视频:
https://v.qq.com/x/page/y0506dtsi6f.html?start=63
使用:
连接到树莓派的Linux系统:
Linux/Mac SSH命令,windows使用Putty等工具。
工具使用方法可以参考
autolabor 机器人默认的IP是 192.168.1.1 用户名 pi 密码 raspberry
默认启动脚本
默认情况下Linux系统在启动后会执行脚本 /etc/rc.local 里的内容
vim /etc/rc
.local 进行编辑
打开后:
cd
/root
./startautolabor. sh
./startautolabor. sh
startautolabor.sh 是 Autolabor的自动启动脚本,该脚本的内容如下.
source /opt/ros/indigo/setup.bash
export ROS_MASTER_URI=http://192.168.1.1:11311/
export ROS_IP=192.168.1.1
roslaunch /opt/ros/indigo/share/rosbridge_server/launch/rosbridge_websocket.launch
export ROS_MASTER_URI=http://192.168.1.1:11311/
export ROS_IP=192.168.1.1
roslaunch /opt/ros/indigo/share/rosbridge_server/launch/rosbridge_websocket.launch
其中第二行和第三行配置了ROS MASTER的IP地址和本机IP地址.
最后一行启动了 rosbridge_websocket.launch 文件,这个文件内配置的节点实现控制底盘和手机通讯的功能.
#注释,增加自己脚本
cd /root
#./startautolabor
.sh
myrobot .sh
myrobot .sh
也可以根据需要修改startautolabor.sh的内容,例如替换成自己需要的IP地址,执行自己需要的launch文件.
默认roslunch文件:rosbridge_websocket.launch文件中,默认配置了两个节点
ros_arduino_python
rosbridge_websocket
rosbridge_websocket
其中ros_arduino_python负责与下位机Arduino通讯,将cmd_vel指令转化为Arduino需要的PID指令,从而控制马达以指定速度旋转.同时会读取Arduino提供的编码器数据,向ROS系统发布里程计数据.
rosbridge_websocket是实现手机遥控的核心部件,它负责实现手机端与ros系统的通讯功能.当手机端需要订阅某个topic时,会通过websocket像rosbridge_websocket发起订阅的申请, 由rosbridge向其通知ros系统内部topic新的消息. rosbridge 可以通过tcp udp 和 websocket 通讯, autolabor2中使用的websocket的实现方式.
手机客户端:
基于ROSBridge和Unity3D开发: http://autolabor.cn/autolabor2/dev-u3d/
3、Autolabor 2.5
在2代的基础上搭载rplidar a1改进版激光雷达,搭载Autolabor OS,Autolabor OS :超级账户 root 密码 autolabor