模拟客户端生成小乌龟服务请求生成小乌龟
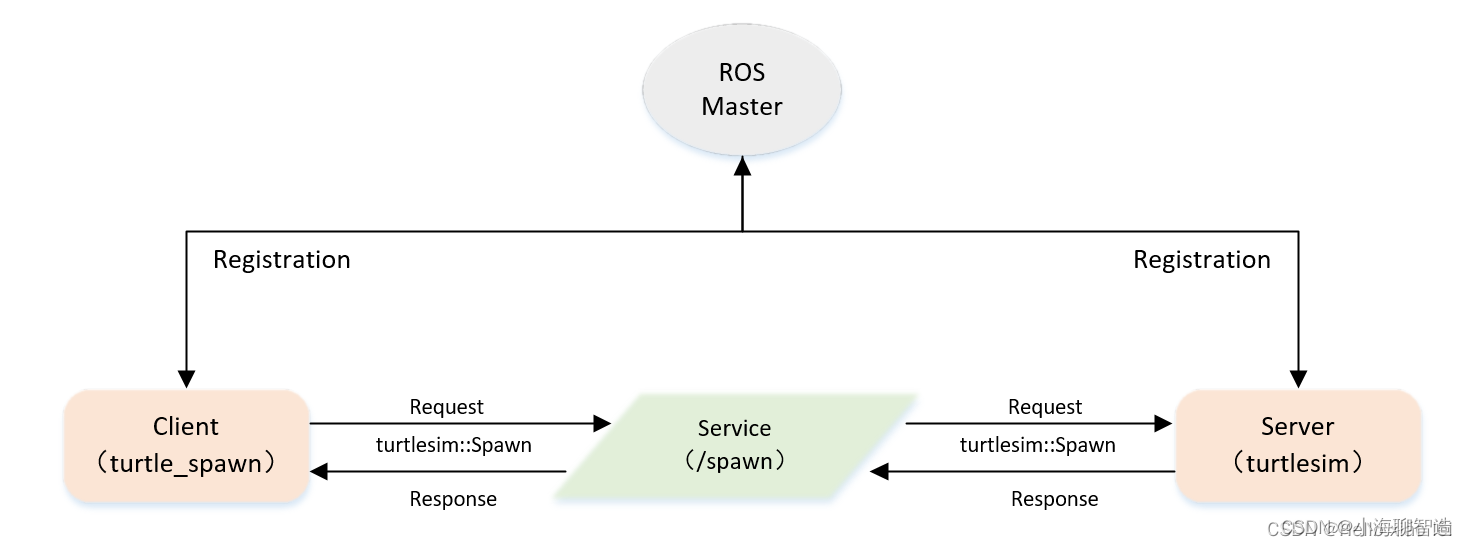
一、话题模型
Sever端是海龟仿真器/turtlesim,Client端是待实现的程序,其作为Response的节点,并产生Request的请求,发给Server端。Server端收到Request请求后产生一只海龟,回馈一个Response给Client海龟产生是否成功。Service的名称为/spawn,中间传输消息的数据结构为turtlesim::Spawn。ROS Master负责管理节点。
生成小乌龟的方式:
第一种 :
通过一下的命令就可以生成第二个小乌龟
rosservice call /spawn 4 4 0 turtle2
turtle2 是小乌龟的名字
第二种:
二、创建功能包
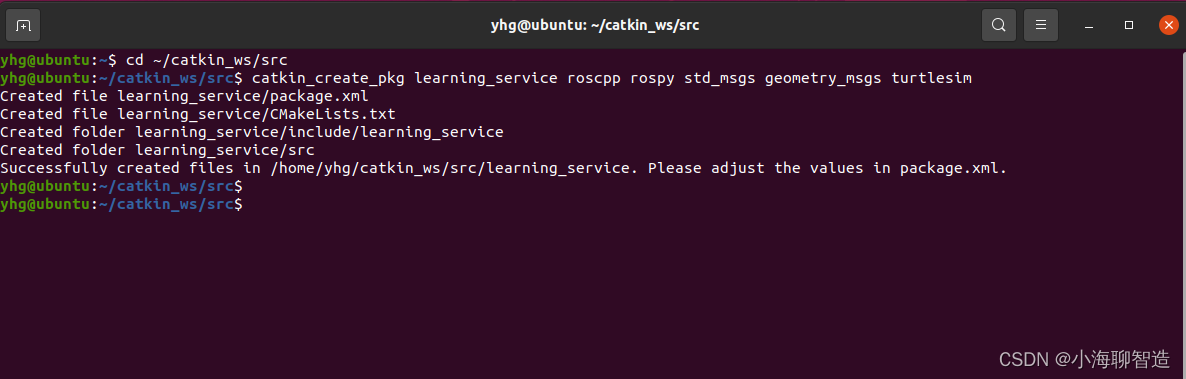
创建新的功能包 learning_service
cd ~/catkin_ws/src
catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
三 创建客户端Client代码
在learning_service/src新建文件turtle_spawn.cpp
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
四 配置CMakeLists.txt编译规则:
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${
catkin_LIBRARIES})
编译:
cd ~/catkin_ws
catkin_make
如有权限问题切到root 用户继续执行
五 测试
启动ros 主服务
roscore
启动小乌龟的服务
rosrun turtlesim turtlesim_node
启动模型客户端服务
rosrun learning_service turtle_spawn
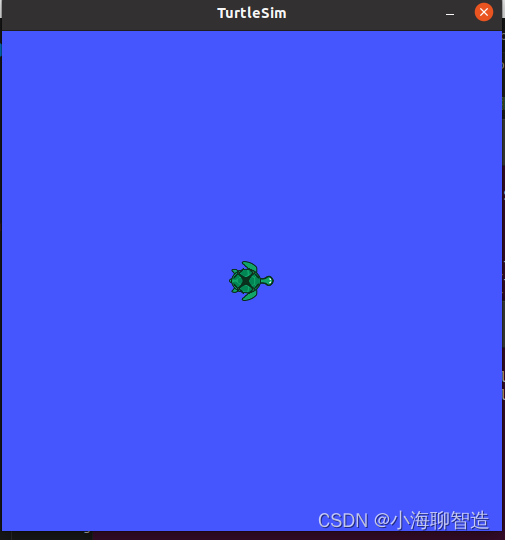
运行效果:
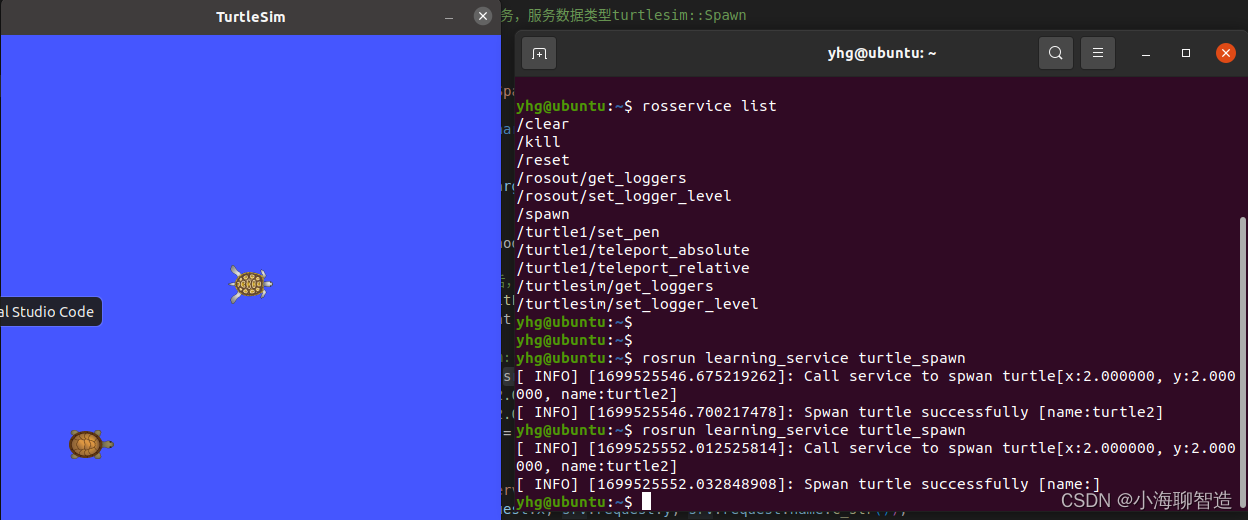
从图中可以看到下面的那个小乌龟就是通过启动模型客户端的动作产生的