经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
2.2 汽车雷达架构
从顶层来看,基本的汽车雷达由发射器,接收器和天线组成。图2.2给出了一种简化的单通道连续波雷达结构[2]。这种结构适用于大多数连续波雷达。根据不同的波形类型,雷达不同部分的实际硬件实现可能会有所不同。在发射端(Tx),一个信号合成器被用来产生不同的波形。然后,产生的波形被放大并由发射天线发射。有一部分产生的信号被送入接收器,作为本地振荡器(LO)。在接收器(Rx)侧,接收器天线接收来自目标的反射信号。接收信号首先在接收机信道上经过一系列放大和滤波处理。然后是一个正交下变频器,它将接收到的信号与LO混合以产生基带信号。下变频后,基带信号被采样到数字域进行进一步处理。
如前所述,图2.2中的简化架构并不适用于所有类型的连续波雷达,因为它们的波形多种多样。例如,为了支持多个信道,许多设计在发射机中有一个额外的调制,以帮助接收器从不同的发射机信道分离信号。有些设计在发射机信道中有移相器来支持波束形成。另一个例子是,在接收端,并不总是需要正交下变频器,在某些情况下,单通道直接下变频器也可以工作。
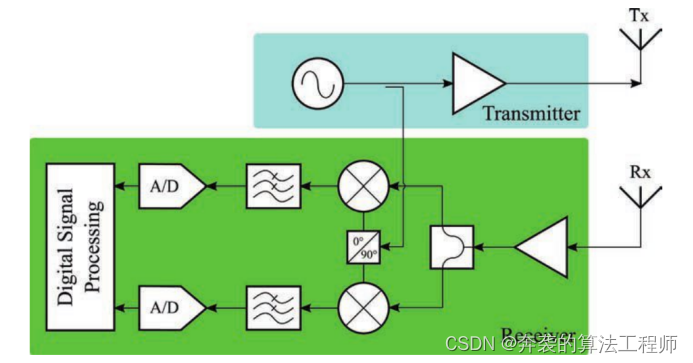
图2.2 简化的单通道雷达架构
2.2.1 发射机
对于汽车雷达来说,其发射机在决定整个系统的灵敏度和距离分辨率方面起着重要的作用。使用更高的发射功率和高增益天线改善信号并增加雷达在更远距离探测较小目标的能力。此外,发射更宽的BW提高了雷达对近距离目标的识别能力。然而,汽车雷达发射机使用的频带和最大发射功率也受到当局的高度管制。由于电磁波广泛应用于现代技术,特别是电信领域,为了防止不同用户之间的干扰,电磁波的产生和传输受到国家法律的严格管制,并由国际电信联盟(ITU)这一国际机构进行协调。对于汽车雷达应用,全球有四个专用频段,包括24 GHz和77 GHz频段。表2.1显示了目前汽车雷达可用的频段。
表2.1 汽车雷达频段
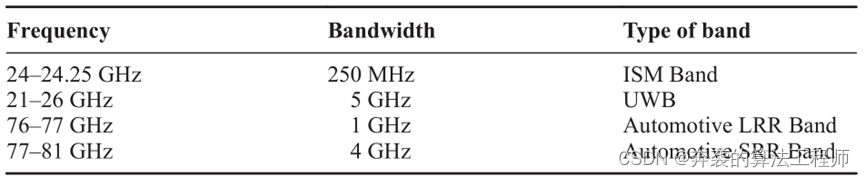
24 ~ 24.25 GHz范围内的250 MHz BW是ISM (industrial, scientific and medical)保留频段,与未授权和授权的业务共享。由于这是一个共享频段,因此受到干扰的可能性很高。21 ~ 26 GHz的5 GHz超宽带(UWB)对发射功率的要求非常严格,限制了其在短距离上的应用。两个更高的频段,包括76-77GHz用于远程雷达(LRR)和77-81GHz用于短程雷达(SRR),已经由大多数国家的当局分配。由于以下优点,这两个较高的频段是汽车雷达的选择频段。首先,77 GHz频段范围从76 GHz到81 GHz, BW超过4 GHz。宽BW增加了雷达的距离分辨率,使其能够区分近距离目标。频率越高,波长越短,速度测量的分辨率和精度也越高。此外,较短的波长也有助于减小汽车雷达的天线尺寸。由于77 GHz频段专用于汽车雷达应用,因此该法规还允许该频段具有更高的发射功率。在79 GHz工作的汽车雷达的授权最大有效各向同性辐射功率(EIRP)为55 dBm,最坏情况下的平均EIRP频谱密度低于-3 dBm/MHz[3]。另一方面,24GHz频段的峰值限制为20dbm EIRP。
信号合成器,也称为波形发生器,是汽车雷达最重要的部件之一。信号合成器能够为不同的应用产生各种类型的波形。图2.3给出了波形的四个常见例子。第一种波形是单音信号,它是多普勒雷达中使用的未调制正弦波。FMCW波形是一种线性调制信号,其频率随时间线性变化。步进频率连续波波形的频率增加/减少呈阶梯状。移频键控波形具有交变频率。对于汽车雷达来说,FMCW波形是目前使用最广泛的波形,因为它易于锁相环(PLL)产生,并且从基带获取距离信息的效率很高。在本章中,FMCW波形将作为讨论的主要示例,尽管大多数原理适用于其他波形。
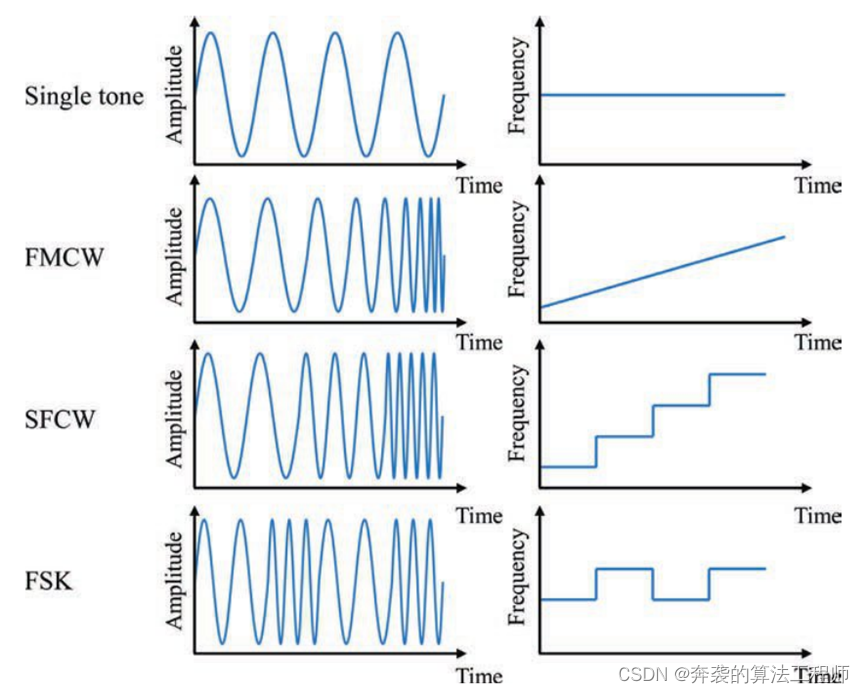
图2.3 不同类型波形
2.2.2 接收机
接收机的主要目的是对接收到的回波进行相干下变频,得到基带信号。如图2.2所示,接收到的信号被分成两个通道。一个通道与LO信号混合,LO信号是发射信号的副本,以获得基带的同相或“I”通道。另一个通道与90°相移的LO信号混合以获得基带的正交相位或“Q”通道。假设发射信号为f(t),则接收回波r(t)可表示为:
![]() (2.2)
(2.2)
式中t为时间,δ t为雷达与目标之间电磁波的往返时延,A为信号幅度变化量。混频后基带信号rb (t)可简单表示为:
![]() (2.3)
(2.3)
式中*表示复信号的共轭。在下面的章节中,FMCW波形将用于详细讨论(2.2)和(2.3)。
在现代汽车雷达中,基带信号的处理通常采用数字信号处理。因此,有必要将模拟基带信号转换为数字表示。模数转换中最基本的问题是选择合适的采样率。Nyquist抽样定理[4]提供了指导,这里不再讨论。
2.2.3 天线和天线阵列
在雷达系统中,天线或天线阵列对雷达的灵敏度和角分辨率起着至关重要的作用。雷达系统中使用了各种类型的天线。对于汽车雷达,贴片天线是最广泛使用的,因为它们的低成本和易于制造。图2.4给出了两个贴片天线的示例[5]。图2.4(a)为3元串联馈电贴片天线,图2.4(b)为5元串联馈电贴片天线。天线最重要的特性是它的增益、波束宽度和旁瓣电平。天线远场辐射方向图P(θ, φ)通常用来描述天线相对于天线轴向(θ, φ)方向的辐射强度。
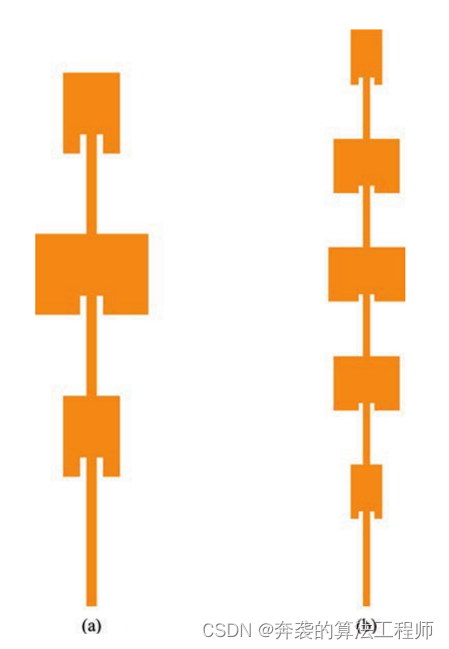
图2.4 贴片天线的示例[5](a) 3元串联馈电贴片天线和(b) 5元串联馈电贴片天线。
图2.5显示了图2.4(a)中3元串联馈电贴片天线的远场辐射方向图。E平面对应于与电场平行的平面,在图2.4(a)中平行于天线的垂直截面。H平面为与磁场平行的平面,垂直于图2.4(a)中天线的垂直截面。E面半功率波束宽度(HPBW)为48.6°,H面半功率波束宽度为81.5°。对于图2.4(b)中的天线,由于其长度较长,其增益较高,但E-平面HPBW较窄。
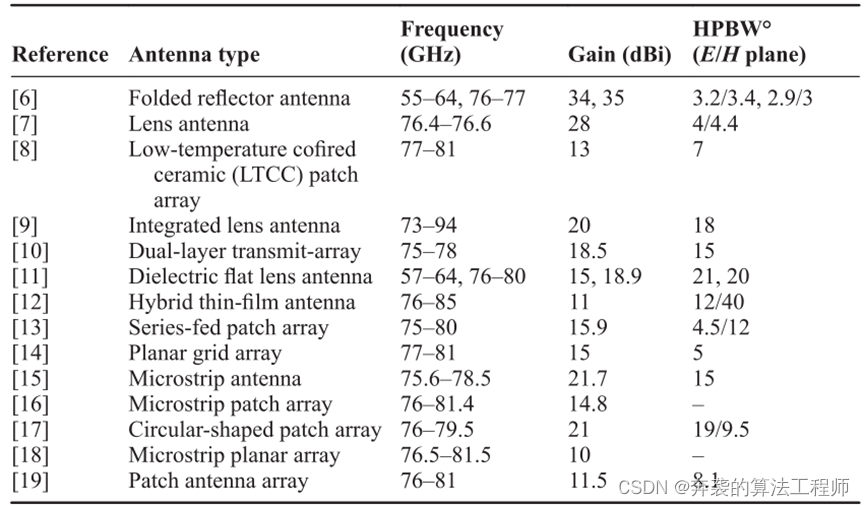
除了流行的贴片天线外,其他类型的天线,如衬底集成波导天线和透镜天线,也广泛应用于汽车雷达中。表2.2列出了文献中几种77 GHz低成本汽车雷达平面天线。
天线阵列是协同工作的天线单元的集合。天线阵列使雷达能够发现与雷达相关的目标的角度。通过控制各阵元的相位和幅度,阵元能够将主波束引导到感兴趣的角度,甚至形成多波束。另一方面,阵列中空点的方向也可以调整,可以用来抑制强干扰。图2.6给出了一个简单的八元线性阵列的例子。假设阵列元素为各向同性辐射元素。该线性阵列的阵列因子可表示为[1]:
 (2.3)
(2.3)
![]() (2.4)
(2.4)
式中N为阵元个数,k = 2π/λ为波数。λ是波长,yn是第n个阵元的位置,ϕ是方位角。ωn是第n个阵元的权值,对应于激励的相位和振幅等属性。

图2.5 仿真的3元串联馈电贴片天线的H面和E面方向图
表2.2 汽车雷达频率带
考虑一个常见的情况,相邻阵元之间的间距d = λ/2,(2.4)可以化简为:
 (2.6)
(2.6)
具有均匀激励,这里
![]() (2.7)
(2.7)

图2.6 八阵元线性阵列
对应的阵列因子如图2.7所示。该模式的主瓣指向0,副瓣电平约为-11 dB。如果元素的相位被调谐,例如:
![]() (2.8)
(2.8)
对应的阵列因子如图2.8所示,这里方向图主瓣转到了-20°。
通过调整每个阵元的相位和幅度,可以实现更复杂的波束形成。图2.9所示的一个例子是(2.8)中的权重乘以40 dB旁瓣电平的道尔夫-切比雪夫窗[20]。
阵列因子假设阵元是各向同性辐射单元。对于具有真实辐射单元的阵列,其全辐射Parray(ϕ)为阵列因子与单元辐射方向图P(ϕ)的乘积[1]:
![]() (2.9)
(2.9)

图2.7 均匀激励的阵列因子
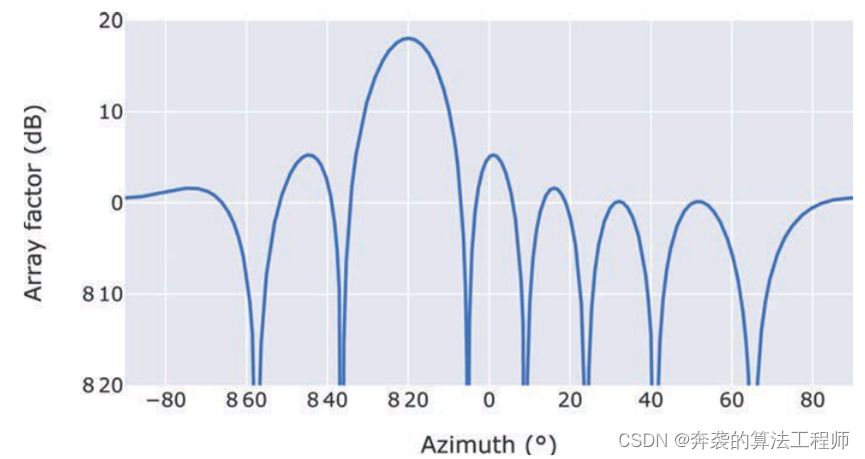
图2.8 权重为式(2.8)的阵列因子
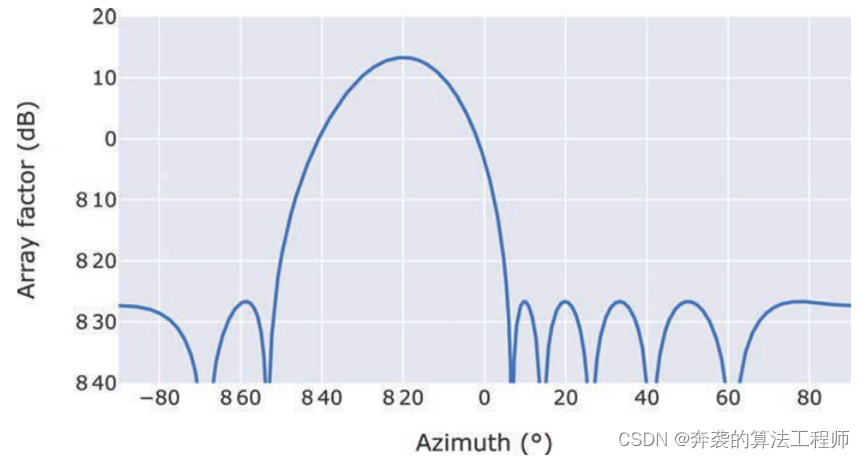
图2.9 权重为式(2.8)乘上道尔夫-切比雪夫窗的阵列因子