手机传感器中的加速度传感器
期末做的是计步器APP,所以对加速度传感做了些研究哈哈,下面我就讲讲我学习的一下东西。
1、什么是加速度传感器?
首先传感器,顾名思义,就是将对象的变化感受传达给设备的一种工具,在Android中使用加速度传感器可以帮助我们识别手机的姿态及运动状态。经常听到的有方向传感器,重力感应器,加速度传感器,心率传感器等等。不同版本系统安卓机支持的传感器会不同,所以开发时要选择支持加速度传感器的安卓系统版本。
2、 加速度的求取
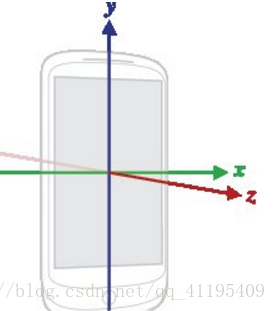
由于手机会固定受到地球重力加速度,因此传感器的读数是受此影响后的数值。
假如我们的手机是垂直摆放,机头朝上。那么x,z轴均无加速度,y轴上会固定受到地球重力加速度的影响。
此时,由于y轴向上为正方向,因此重力加速度为负值,y轴的加速度就为:
ay=a−(−g)=a+9.81
因此竖直静止时,三轴的加速度近似于:
(ax,ay,az)=(0,9.81,0)
反之在垂直摆放,机头朝下(倒立摆放)时。y轴方向是向下的,因此这时地球加速度为+9.81。这种情况下y轴的加速度:
ay=a−g=a−9.81
静止时有近似值:
(ax,ay,az)=(0,−9.81,0)
3、使用加速度传感器与其他传感器的方法大致相同,通过调用系统API就可以实现。分为以下几步:
1.获取SensorManager
2.使用SensorManager获取加速度传感器
3.创建自定义的传感器监听函数,并注册
4.相对应的,在合适位置实现注销监听器的调用
4、献上我的学习代码
public class MainActivity extends Activity{
private static final String TAG = “SensorTest”;
private Sensor mAccelerometer;
private TestSensorListener mSensorListener;
@Override
protected void onCreate(Bundle savedInstanceState)
{
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
initViews();
// 初始化传感器
mSensorListener = new TestSensorListener();
mSensorManager = (SensorManager) getSystemService(Context.SENSOR_SERVICE);
mAccelerometer = mSensorManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
{
super.onResume();
// 注册传感器监听函数
mAccelerometer, SensorManager.SENSOR_DELAY_UI); }

@Override
protected void onPause()
{
super.onPause();
{
mSensorInfoA = (TextView) findViewById(R.id.sensor_info_a);
}
class TestSensorListener implements SensorEventListener {
@Overridepublic void onSensorChanged(SensorEvent event)
{
// 读取加速度传感器数值,values数组0,1,2分别对应x,y,z轴的加速度
Log.i(TAG, “onSensorChanged: ” + event.values[0] + “, ” + event.values[1] + “, ” + event.values[2]);
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy)
{
Log.i(TAG, “onAccuracyChanged”);
}
}
}
5计步器
计步器需要手机硬件加速度传感器的支持,而计步器的开发可以用手机自己的传感器也可以用Google内置
计步器开发。这里我选择自己的手机传感器。
6、传感器运行后计步器的工作原理
使用这个传感器时会检测传感器的变化,得到传感器三轴的值(x,y,z)然后计算他们的平均值,这样做的目的是为了平衡在某一个方向数值过大造成的数据误差,然后将该值与上一时间点的值进行比较,判断是否为波峰或波谷,如果是就相应的保存下来。
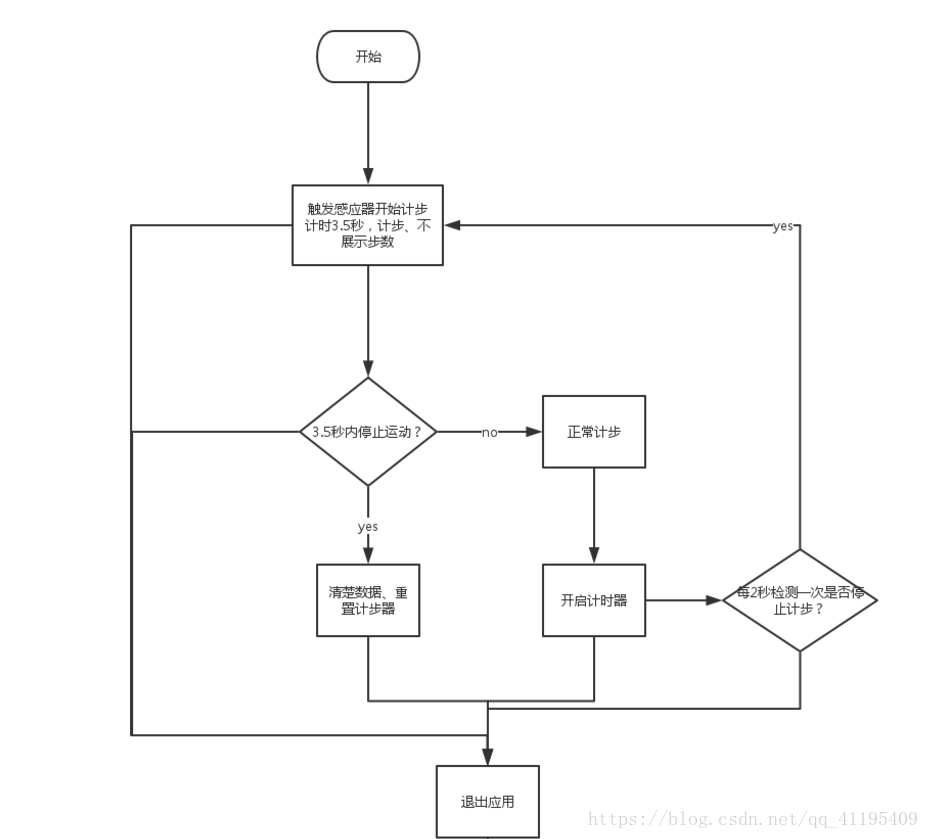
如果检测到了波峰,并且符合时间差以及阈值的条件,则判定位1步,如果符合时间差条件,波峰波谷差值大于initialValue,则将该差值纳入阈值的计算中。同时为防止微小震动对计步的影响,我们将计步分为3个状态——准备计时、计时中、计步中。注意:这里要设计的更加符合实际的运动情况,让软件会分辨有效和无效的步数!!!
所谓“计时中”是在3.5秒内每隔0.7秒对步数进行一次判断,看步数是否仍然在增长,如果不在增长说明之前是无效的震动并没有走路,得到的步数不计入总步数中;反之则将这3.5秒内的步数加入总步数中。
之后进入“计步中”状态进行持续计步,并且每隔2秒去判断一次当前步数和2秒前的步数是否相同,如果相同则说明步数不在增长,计步结束。
为了更直观的理解,附上一张图(原谅我的盗图)
7、实现代码MainActivity.java
public class MainActivity extends AppCompatActivity implements View.OnClickListener,ensorEventListener {
private SensorManager sManager;
private Sensor mSensorAccelerometer;
private TextView tv_step;
private Button btn_start;
private int step = 0; //步数
private double oriValue = 0; //原始值
private double lstValue = 0; //上次的值
private double curValue = 0; //当前值
private boolean motiveState = true; //是否处于运动状态
private boolean processState = false; //标记当前是否已经在计步
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
sManager = (SensorManager) getSystemService(SENSOR_SERVICE);
mSensorAccelerometer = sManager.getDefaultSensor(Sensor.TYPE_ACCELEROMETER);
sManager.registerListener(this, mSensorAccelerometer, SensorManager.SENSOR_DELAY_UI);
bindViews();
}
private void bindViews() {
tv_step = (TextView) findViewById(R.id.tv_step);
btn_start = (Button) findViewById(R.id.btn_start);
btn_start.setOnClickListener(this);
}
@Override
public void onSensorChanged(SensorEvent event) {
double range = 1; //设定一个精度范围
float[] value = event.values;
curValue = magnitude(value[0], value[1], value[2]); //计算当前的模
//向上加速的状态
if (motiveState == true) {
if (curValue >= lstValue) lstValue = curValue;
else {
//检测到一次峰值
if (Math.abs(curValue - lstValue) > range) {
oriValue = curValue;
motiveState = false;
}
}
}
//向下加速的状态
if (motiveState == false) {
if (curValue <= lstValue) lstValue = curValue;
else {
if (Math.abs(curValue - lstValue) > range) {
//检测到一次峰值
oriValue = curValue;
if (processState == true) {
step++; //步数 + 1
if (processState == true) {
tv_step.setText(step + ""); //读数更新
}
}
motiveState = true;
}
}
}
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {}
@Override
public void onClick(View v) {
step = 0;
tv_step.setText("0");
if (processState == true) {
btn_start.setText("开始");
processState = false;
} else {
btn_start.setText("停止");
processState = true;
}
}
//向量求模
public double magnitude(float x, float y, float z) {
double magnitude = 0;
magnitude = Math.sqrt(x * x + y * y + z * z);
return magnitude;
}
@Override
protected void onDestroy() {
super.onDestroy();
sManager.unregisterListener(this);
}
}
作者:马梦文
原文链接:https://blog.csdn.net/qq_41195409/article/details/80715748