wiki上名叫hector_slam, 内部主要的功能包叫 hector_mapping
特点:
对硬件要求低,相反 cartographer高
不需要里程计信息(不需要将雷达的坐标绑定到某个固定坐标系比如base_link)
可以结合IMU数据使用
没有闭环检测部分,精确度高
栅格地图
要求激光的坐标为”laser”
#wiki
#github
https://github.com/tu-darmstadt-ros-pkg/hector_slamhector
Hector = Heterogeneous Cooperating Team of Robots
成立於2008的秋天,於2010年晚期從原本的RoboFrame中的演算法移植變成ROS的型式package整个包包含的节点有
hector_pose_estimation 將sensor的值轉換成imu資訊丟給tf處理。
hector_mapping 不斷地即時更新map,並publish, slam node
hector_map_server 儲存並畫出地圖形狀,提供查詢位置(pose)服務。
hector_trajectory_server Saving of tf based trajectories.
hector_geotiff Saving of map and robot trajectory to geotiff images files. 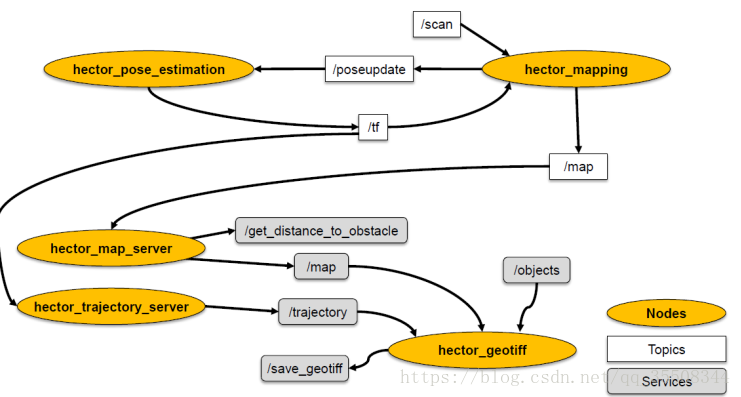
Subscribed topics
scan (sensor_msgs/LaserScan)
#The laser scan used by the SLAM system.
syscommand (std_msgs/String)
#System command. If the string equals "reset" the map and robot pose are reset to their inital state. Published Topics
map_metadata (nav_msgs/MapMetaData)
#Get the map data from this topic, which is latched, and updated periodically.
map (nav_msgs/OccupancyGrid)
#Get the map data from this topic, which is latched, and updated periodically
slam_out_pose (geometry_msgs/PoseStamped)
#The estimated robot pose without covariance
poseupdate (geometry_msgs/PoseWithCovarianceStamped)
#The estimated robot pose with an gaussian estimate of uncertainty Service
dynamic_map (nav_msgs/GetMap)
#Call this service to get the map data