在已知相机运动的情况下,稠密建图中是否需要块匹配?还是根据位姿直接就可以得到匹配像素点?
slam十四讲中,从323页开始讲述稠密建图,使用块匹配技术,来进行稠密深度图估计.
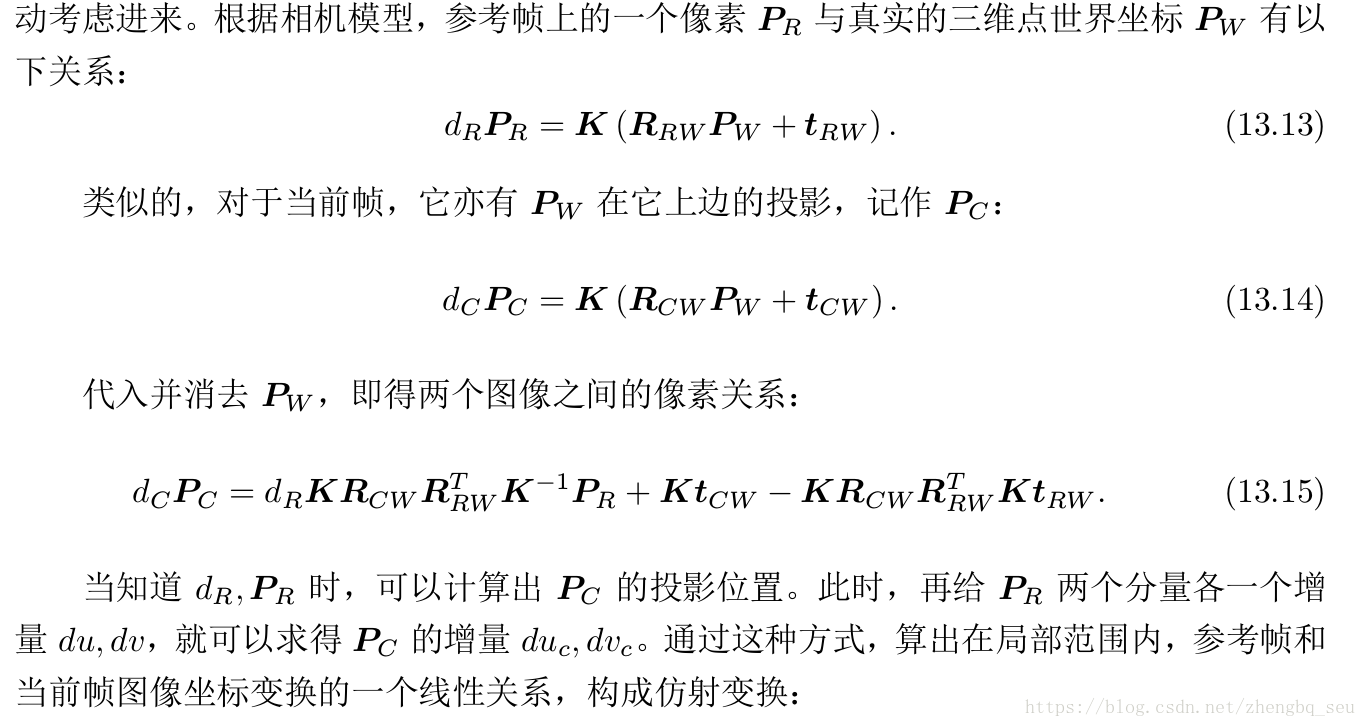
但在341中,提到"在块匹配之前,做一次图像到图像间的变换亦是一种常见的预处理方式"需要在块匹配之前,把参考帧与当前帧之间的运动考虑进来。
在推导过程中又说能得到Pc的位置????:
不能理解???既然得到了,那还要块匹配干什么啊???
难道说:1)这个Pc只是大概的,根据相机位姿大概算出来的,但是不准确,真实的数据要通过深度滤波器得到.
PS:这里的dR和dC是什么啊,在单目中是缩放因子,我还查到一种说是像素点的距离?