鱼眼镜头opencv2校正
如需转载请标明出处:http://blog.csdn.net/itas109
QQ技术交流群:129518033
目录
opencv:2.4.10
系统环境:Windows 7 64bit
注意:OpenCV3.0 alpha增加了鱼眼镜头模型,提供了标定、去畸变等一系列api,其实现方法参考了{Camera Calibration Toolbox for Matlab}。
1.鱼眼镜头校正原理
鱼眼镜头模型
鱼眼镜头的内参模型可以表示为

设(X,Y,Z)为一个三维坐标点,投影在图像上的二维坐标为(u,v),如果不考虑畸变,投影关系如下:
R和t分别代表相机外参中的旋转矩阵和平移向量。
当考虑鱼眼镜头的畸变后,投影关系转化为:
2.鱼眼镜头校正opencv实现
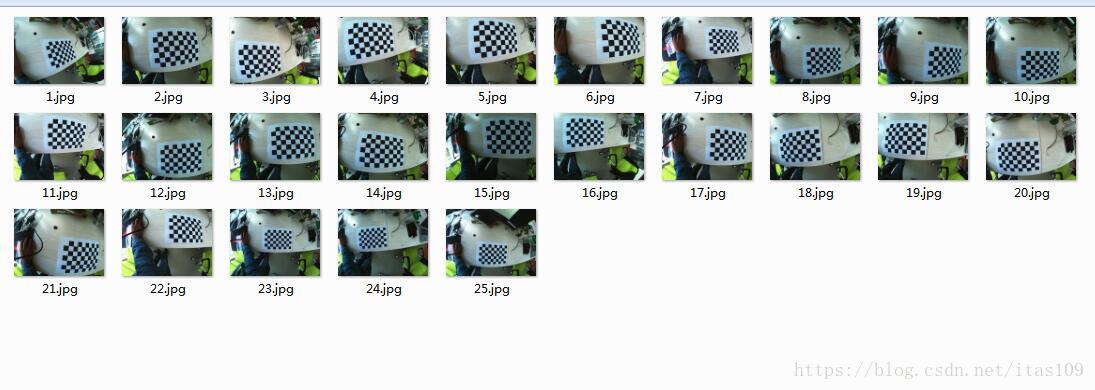
准备25张不同角度的棋盘照片
double time0 = static_cast<double>(getTickCount());
ofstream fout("caliberation_result.txt"); /** 保存定标结果的文件 **/
/************************************************************************
读取每一幅图像,从中提取出角点,然后对角点进行亚像素精确化
*************************************************************************/
cout<<"开始提取角点………………"<<endl;
int image_count= 25; /**** 图像数量 ****/
Size image_size; /**** 图像的尺寸 ****/
Size board_size = Size(9,6); /**** 定标板上每行、列的角点数 ****/
vector<Point2f> corners; /**** 缓存每幅图像上检测到的角点 ****/
vector<vector<Point2f>> corners_Seq; /**** 保存检测到的所有角点 ****/
vector<Mat> image_Seq;
int count = 0;
for( int i = 0; i != image_count ; i++)
{
cout<<"Frame #"<<i+1<<"..."<<endl;
string imageFileName;
std::stringstream StrStm;
StrStm<<i+1;
StrStm>>imageFileName;
imageFileName += ".jpg";
Mat image = imread("img/"+imageFileName);
image_size = image.size();
//image_size = Size(image.cols , image.rows);
/* 提取角点 */
Mat imageGray;
cvtColor(image, imageGray , CV_RGB2GRAY);
bool patternfound = findChessboardCorners(image, board_size, corners,CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE+
CALIB_CB_FAST_CHECK );
if (!patternfound)
{
cout<<"can not find chessboard corners!\n";
continue;
exit(1);
}
else
{
/* 亚像素精确化 */
cornerSubPix(imageGray, corners, Size(11, 11), Size(-1, -1), TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
/* 绘制检测到的角点并保存 */
Mat imageTemp = image.clone();
for (int j = 0; j < corners.size(); j++)
{
circle( imageTemp, corners[j], 10, Scalar(0,0,255), 2, 8, 0);
}
string imageFileName;
std::stringstream StrStm;
StrStm<<i+1;
StrStm>>imageFileName;
imageFileName += "_corner.jpg";
imwrite(imageFileName,imageTemp);
cout<<"Frame corner#"<<i+1<<"...end"<<endl;
count = count + corners.size();
corners_Seq.push_back(corners);
}
image_Seq.push_back(image);
}
cout<<"角点提取完成!\n";
/************************************************************************
摄像机定标
*************************************************************************/
cout<<"开始定标………………"<<endl;
Size square_size = Size(20,20); /**** 实际测量得到的定标板上每个棋盘格的大小 ****/
vector<vector<Point3f>> object_Points; /**** 保存定标板上角点的三维坐标 ****/
Mat image_points = Mat(1, count , CV_32FC2, Scalar::all(0)); /***** 保存提取的所有角点 *****/
vector<int> point_counts; /***** 每幅图像中角点的数量 ****/
Mat intrinsic_matrix = Mat(3,3, CV_32FC1, Scalar::all(0)); /***** 摄像机内参数矩阵 ****/
Mat distortion_coeffs = Mat(1,4, CV_32FC1, Scalar::all(0)); /* 摄像机的4个畸变系数:k1,k2,p1,p2 */
vector<cv::Mat> rotation_vectors; /* 每幅图像的旋转向量 */
vector<cv::Mat> translation_vectors; /* 每幅图像的平移向量 */
/* 初始化定标板上角点的三维坐标 */
for (int t=0;t<image_count;t++)
{
vector<Point3f> tempPointSet;
for (int i=0;i<board_size.height;i++)
{
for (int j=0;j<board_size.width;j++)
{
/* 假设定标板放在世界坐标系中z=0的平面上 */
Point3f tempPoint;
tempPoint.x = i*square_size.width;
tempPoint.y = j*square_size.height;
tempPoint.z = 0;
tempPointSet.push_back(tempPoint);
}
}
object_Points.push_back(tempPointSet);
}
/* 初始化每幅图像中的角点数量,这里我们假设每幅图像中都可以看到完整的定标板 */
for (int i=0; i< image_count; i++)
{
point_counts.push_back(board_size.width*board_size.height);
}
/* 开始定标 */
calibrateCamera(object_Points, corners_Seq, image_size, intrinsic_matrix ,distortion_coeffs, rotation_vectors, translation_vectors, 0);
cout<<"定标完成!\n";
/************************************************************************
对定标结果进行评价
*************************************************************************/
cout<<"开始评价定标结果………………"<<endl;
double total_err = 0.0; /* 所有图像的平均误差的总和 */
double err = 0.0; /* 每幅图像的平均误差 */
vector<Point2f> image_points2; /**** 保存重新计算得到的投影点 ****/
cout<<"每幅图像的定标误差:"<<endl;
cout<<"每幅图像的定标误差:"<<endl<<endl;
for (int i=0; i<image_count; i++)
{
vector<Point3f> tempPointSet = object_Points[i];
/**** 通过得到的摄像机内外参数,对空间的三维点进行重新投影计算,得到新的投影点 ****/
projectPoints(tempPointSet, rotation_vectors[i], translation_vectors[i], intrinsic_matrix, distortion_coeffs, image_points2);
/* 计算新的投影点和旧的投影点之间的误差*/
vector<Point2f> tempImagePoint = corners_Seq[i];
Mat tempImagePointMat = Mat(1,tempImagePoint.size(),CV_32FC2);
Mat image_points2Mat = Mat(1,image_points2.size(), CV_32FC2);
for (size_t i = 0 ; i != tempImagePoint.size(); i++)
{
image_points2Mat.at<Vec2f>(0,i) = Vec2f(image_points2[i].x, image_points2[i].y);
tempImagePointMat.at<Vec2f>(0,i) = Vec2f(tempImagePoint[i].x, tempImagePoint[i].y);
}
err = norm(image_points2Mat, tempImagePointMat, NORM_L2);
total_err += err/= point_counts[i];
cout<<"第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<endl;
fout<<"第"<<i+1<<"幅图像的平均误差:"<<err<<"像素"<<endl;
}
cout<<"总体平均误差:"<<total_err/image_count<<"像素"<<endl;
fout<<"总体平均误差:"<<total_err/image_count<<"像素"<<endl<<endl;
cout<<"评价完成!"<<endl;
/************************************************************************
保存定标结果
*************************************************************************/
cout<<"开始保存定标结果………………"<<endl;
Mat rotation_matrix = Mat(3,3,CV_32FC1, Scalar::all(0)); /* 保存每幅图像的旋转矩阵 */
fout<<"相机内参数矩阵:"<<endl;
fout<<intrinsic_matrix<<endl;
fout<<"畸变系数:\n";
fout<<distortion_coeffs<<endl;
for (int i=0; i<image_count; i++)
{
fout<<"第"<<i+1<<"幅图像的旋转向量:"<<endl;
fout<<rotation_vectors[i]<<endl;
/* 将旋转向量转换为相对应的旋转矩阵 */
Rodrigues(rotation_vectors[i],rotation_matrix);
fout<<"第"<<i+1<<"幅图像的旋转矩阵:"<<endl;
fout<<rotation_matrix<<endl;
fout<<"第"<<i+1<<"幅图像的平移向量:"<<endl;
fout<<translation_vectors[i]<<endl;
}
cout<<"完成保存"<<endl;
fout<<endl;
/************************************************************************
显示定标结果
*************************************************************************/
Mat mapx = Mat(image_size,CV_32FC1);
Mat mapy = Mat(image_size,CV_32FC1);
Mat R = Mat::eye(3,3,CV_32F);
R = Mat();
cout<<"保存矫正图像"<<endl;
for (int i = 0 ; i != image_count ; i++)
{
cout<<"Frame #"<<i+1<<"..."<<endl;
// undistort 等同于initUndistortRectifyMap
// Mat t = image_Seq[i].clone();
// undistort(image_Seq[i], t,intrinsic_matrix, distortion_coeffs);
initUndistortRectifyMap(intrinsic_matrix,distortion_coeffs,Mat(),Mat() ,image_size,CV_16SC2,mapx,mapy);//CV_32FC1
Mat t = image_Seq[i].clone();
cv::remap(image_Seq[i],t,mapx, mapy, INTER_LINEAR);
string imageFileName;
std::stringstream StrStm;
StrStm<<i+1;
StrStm>>imageFileName;
imageFileName += "_d.jpg";
imwrite(imageFileName,t);
}
cout<<"保存结束"<<endl;
time0 = ((double)getTickCount()-time0)/getTickFrequency();
cout<<"标定用时:"<<time0<<"秒"<<endl;
/************************************************************************
测试一张图片
*************************************************************************/
double time1 = static_cast<double>(getTickCount());
if (1)
{
cout<<"TestImage ..."<<endl;
Mat testImage = imread("1.jpg",1);
// undistort 等同于initUndistortRectifyMap
// Mat t = testImage.clone();
// undistort(testImage, t,intrinsic_matrix, distortion_coeffs);
initUndistortRectifyMap(intrinsic_matrix,distortion_coeffs,Mat(),Mat() ,image_size,CV_16SC2,mapx,mapy);//CV_32FC1
Mat t = testImage.clone();
cv::remap(testImage,t,mapx, mapy, INTER_LINEAR);
imwrite("TestOutput.jpg",t);
cout<<"保存结束"<<endl;
}
time1 = ((double)getTickCount()-time1)/getTickFrequency();
cout<<"校正用时:"<<time1<<"秒"<<endl;3.结果
校正前:

校正后:
Refrence:
https://blog.csdn.net/qq_15947787/article/details/51441031?locationNum=11&fps=1
http://www.vision.caltech.edu/bouguetj/calib_doc/
觉得文章对你有帮助,可以用微信扫描二维码捐赠给博主,谢谢!

如需转载请标明出处:http://blog.csdn.net/itas109
QQ技术交流群:129518033