以前一直在做视频编解码和传输的工作,对视频采集前端设备的了解比较少,特别是对cmos sensor和镜头这块更是知之甚少。
这次由于做vr相机开发,涉及到对镜头和sensor的选型,因此特意对其中的参数和原理了解了一番,把自己的理解记录下来。
sensor与镜头相关的参数主要是靶面尺寸,这个尺寸的长宽比一般是4:3,常用的靶面尺寸有1/3“、1/2.5”、1/2“等,具体换算到mm参考这篇文章http://www.360doc.com/content/16/0229/07/248984_538174911.shtml。
鱼眼镜头的参数一般如下表所示:

分辨率跟图像的细腻度有关,分辨率越大,图像细节越清楚,当然这与后面的sensor和cpu处理都有关系。焦距越大,看的越远。
镜头与sensor成像之间的关系如下图所示:其中白圈表示镜头成像部分,绿色部分表示sensor的靶面区域(最终成像是绿色矩形部分)

一般的摄像机都是绿色矩形要处于白圈内部,不然图像会出现黑色部分。但是对于鱼眼摄像机,由于后边还有矫正处理,所以要求不太一样。
鱼眼镜头与sensor的成像种类如下:
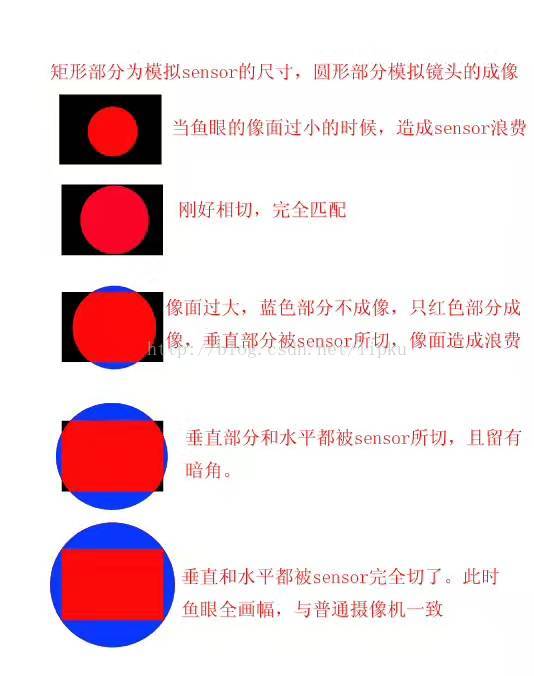
如果需要保持镜头左右和上下的视场角不被切割,如都保持为180度,则采用上图第二种模式,这样出来的图像是一个圆形的,如下图。这样有一个不足处是因为sensor一般都是4:3的矩形,导致左右有很大的黑场,浪费了很多像素。在视频传输和存储中都会造成不小的浪费。

还有一种应用场景是保持镜头左右视场角不被切割,上下视场角可以切割一部分,则采用第3种模式。这在4个以上鱼眼镜头组成的vr相机中常用这种模式。出来的图像如下图所示,这种模式的好处是左右浪费的像素比较少,但是上下的角度达不到镜头原有的视场角。

综上,举一个实际的例子,如sensor尺寸为1/1.8“,其靶面实际尺寸为7.17*5.319。如果用第二种模式成像,则镜头的像面尺寸尽可能接近5.319mm。如果采用第三种模式成像,则镜头的像面尺寸在5.319与7.17之间,具体多少,依赖于上下角度能切割多少。