Precision, Recall Rate, and F-score
一般用来评估图像分割中的边缘检测问题。准确度是检测出的像素中是边缘的比例,召回率是检测出的正确边缘占所有边缘的比例,F-score是两者的调和平均数。
Pixel error
评估图像分割问题最简单的方法。比较预测的label和实际的label,错误的点除以总数,就是像素误差。对于二值掩膜来说,欧式距离和汉明距离的结果相同。
![]()
优点是简单,但是对于位置的偏移过分敏感,肉眼不可见的偏移都会产生大量的像素误差。
Rand error
兰德指数是两个数据聚类的相似性评价方法,改造之后用来衡量分割性能,因为分割可以看作是聚成类的像素。
给定一张图片S,有n个像素点,同时有两个分割X和Y(实际和预测?)
- a:两个分割中同属于一个聚类的像素点数量
- b:两个分割中都不属于一个聚类的像素点数量
Rand指数:
RI是用来衡量相似度的,越高越好,和误差相反,因此兰德误差如下:
兰德误差作为不一致的度量,是两个分割对一对像素是否属于或者不属于同一个聚类的频率。
Warping error
当大致检测出来一个目标,用Pixel error会发现误差很大,但实际上这个分割可能看着很好。在这种情况中,pixel error和rand error不是一个好的选择。
warping error主要来衡量分割目标的拓扑形状效果。给定

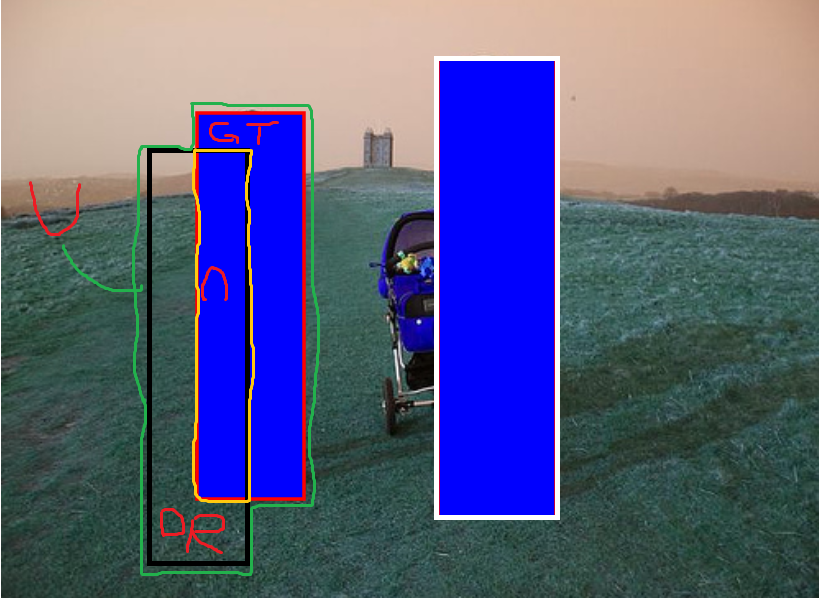
目标检测评价函数intersection-over-union ( IOU )
模型产生的目标窗口和原来标记窗口的交叠率。具体我们可以简单的理解为: 即检测结果(DetectionResult)与 Ground Truth 的交集比上它们的并集,即为检测的准确率 IoU :
如下图所示,GT = GroundTruth; DR = DetectionResult
- 黄色框框起来的是
GT⋂DR - 绿色框框起来的是
GT⋃DR - 最理想的情况是刚好重合,那么这个值为1
可以使用矩形来框面积,使用图像分割中的掩膜。
程序如下:
# -*- coding: utf-8 -*-
"""
Created on Sun Aug 07 14:26:51 2016
@author: Eddy_zheng
"""
def IOU(Reframe,GTframe):
"""
自定义函数,计算两矩形 IOU,传入为均为矩形对角线,(x,y) 坐标。·
"""
x1 = Reframe[0];
y1 = Reframe[1];
width1 = Reframe[2]-Reframe[0];
height1 = Reframe[3]-Reframe[1];
x2 = GTframe[0];
y2 = GTframe[1];
width2 = GTframe[2]-GTframe[0];
height2 = GTframe[3]-GTframe[1];
endx = max(x1+width1,x2+width2);
startx = min(x1,x2);
width = width1+width2-(endx-startx);
endy = max(y1+height1,y2+height2);
starty = min(y1,y2);
height = height1+height2-(endy-starty);
if width <=0 or height <= 0:
ratio = 0 # 重叠率为 0
else:
Area = width*height; # 两矩形相交面积
Area1 = width1*height1;
Area2 = width2*height2;
ratio = Area*1./(Area1+Area2-Area);
# return IOU
return ratio,Reframe,GTframe参考资料
https://imagej.net/Topology_preserving_warping_error
Zhu F, Liu Q, Fu Y, et al. Segmentation of Neuronal Structures Using SARSA (λ)-Based Boundary Amendment with Reinforced Gradient-Descent Curve Shape Fitting[J]. Plos One, 2014, 9(3):e90873.
http://blog.csdn.net/eddy_zheng/article/details/52126641