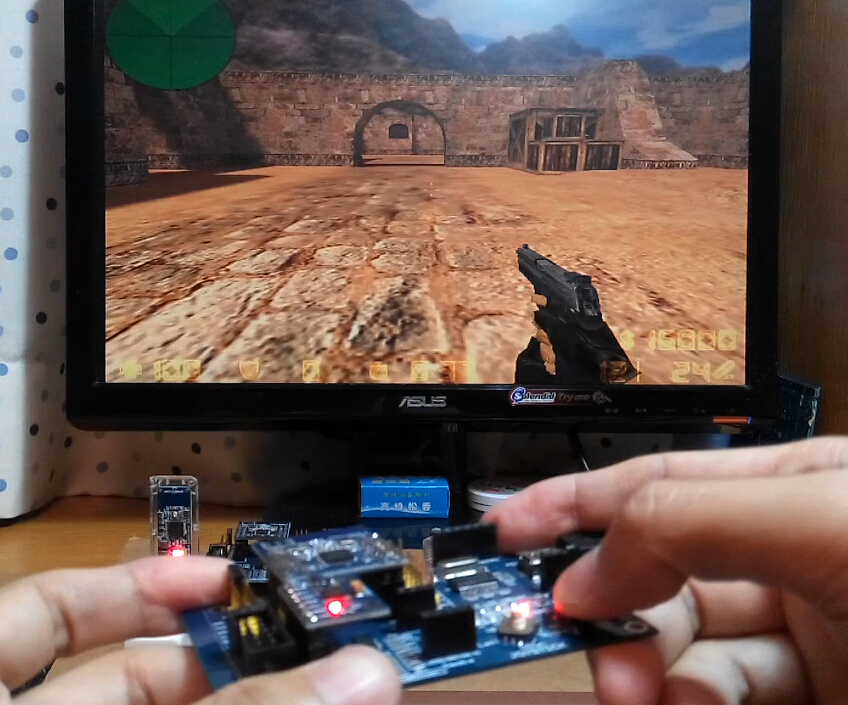
蓝牙4.0BLE开发板实现空中飞鼠、体感游戏手柄
近年来开始流行空中飞鼠与体感游戏手柄,正好我们的开发板上设计有插入mpu6050六轴传感器的适配接口,我们中秋节期间兴趣使然,实现了这么一个方案。
感谢 “圆点博士STM32” 提供的mpu6050 dmp输出欧拉角度的例程,没有他们预先移植到stm32上,我们也没那么快在我们这个开发板上能跑上mpu605的dmp输出。
感谢 Micorduino的小潘, 给我提了不少好建议,他们在做 Arduino的兼容产品,效果优秀。
硬件需求:
1, 一块 amomcu 的SmartRF 蓝牙4.0开发板, cc2541核心板 (目前只支持cc2541, 未来可考虑支持cc2540)。
2, 一块 mpu6050模块, 可插到我们的SmartRF 蓝牙4.0开发板上。
3, 一块 usbdongle适配器, 用于模拟成hid设备,接收smartRF发送过来的坐标和按键数据。
4, 一块 cc debugger仿真器, 用于烧录usbdongle 和smartRF开发板。
软件需求:
1, usb dongle 烧录 “\BLE-CC254x-1.3.2\Projects\ble\HIDAdvRemoteDongle”工程固件。
2, 在 “\BLE-CC254x-1.3.2\Projects\ble\HIDAdvRemote”工程基础上,修改按键,添加 mpu6050dmp输出驱动,通过欧拉角判断,添加坐标发送。
缺点:
1, mpu6050的dmp输出有一个角度会飘,放得越久飘得越大,跟朋友讨论,应该要通过磁场芯片数据来矫正。
2, 开发板按键数量有限,比如我们在用飞鼠来打cs时,换子弹都没有按键了。若是做成产品,还有很多事情要做, 不过我们玩玩的目的是达到了。
感谢 “圆点博士STM32” 提供的mpu6050 dmp输出欧拉角度的例程,没有他们预先移植到stm32上,我们也没那么快在我们这个开发板上能跑上mpu605的dmp输出。
感谢 Micorduino的小潘, 给我提了不少好建议,他们在做 Arduino的兼容产品,效果优秀。
硬件需求:
1, 一块 amomcu 的SmartRF 蓝牙4.0开发板, cc2541核心板 (目前只支持cc2541, 未来可考虑支持cc2540)。
2, 一块 mpu6050模块, 可插到我们的SmartRF 蓝牙4.0开发板上。
3, 一块 usbdongle适配器, 用于模拟成hid设备,接收smartRF发送过来的坐标和按键数据。
4, 一块 cc debugger仿真器, 用于烧录usbdongle 和smartRF开发板。
软件需求:
1, usb dongle 烧录 “\BLE-CC254x-1.3.2\Projects\ble\HIDAdvRemoteDongle”工程固件。
2, 在 “\BLE-CC254x-1.3.2\Projects\ble\HIDAdvRemote”工程基础上,修改按键,添加 mpu6050dmp输出驱动,通过欧拉角判断,添加坐标发送。
缺点:
1, mpu6050的dmp输出有一个角度会飘,放得越久飘得越大,跟朋友讨论,应该要通过磁场芯片数据来矫正。
2, 开发板按键数量有限,比如我们在用飞鼠来打cs时,换子弹都没有按键了。若是做成产品,还有很多事情要做, 不过我们玩玩的目的是达到了。