STM32开发板上是如何实现串口通信的,我以实现printf重定向为例来进行分析!
先看代码:
main.c:
#include "printf.h"
int main()
{
printf_init();
printf("\nhello!every body!\n");
printf("I am zoulei\n");
printf("serial communications is so mystical and interesting!\n");
printf("keep striving!\n");
}printf.c:
#include "printf.h"
#include "stm32f10x.h"
#include "stm32f10x_rcc.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_usart.h"
#include "misc.h"
int fputc(int ch,FILE *f)
{
while(USART_GetFlagStatus(USART2,USART_FLAG_TC) != SET);
USART_SendData(USART2,(unsigned char)ch);
while(USART_GetFlagStatus(USART2,USART_FLAG_TC) != SET);
return (ch);
}
void printf_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/*config USART clock*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd( RCC_APB1Periph_USART2,ENABLE);
/*USART1 GPIO config*/
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_IN_FLOATING; //复用开漏输入
GPIO_Init(GPIOA,&GPIO_InitStructure);
/*USART1 mode Config*/
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART2,&USART_InitStructure);
USART_Cmd(USART2,ENABLE);printf.h:
#ifndef __printf_H
#define __printf_H
#include "stm32f10x.h"
#include <stdio.h>
void printf_init(void);
int fputc(int ch,FILE *f);
#endif
代码分析:
1.串口初始化配置
学了STM串口通信之后,我们知道配置串口通信至少要配置:字长(一次传送的数据长度),波特率(每秒传输的数据位数),奇偶校验位,还有停止位。当然我在
配置过程中把他们分别设为8,115200,No ,1。
串口的配置主要与USART_InitTypeDef这个结构体有关,里面存放了控制参数成员:
typedef struct
{
uint32_t USART_BaudRate; //波特率
uint16_t USART_WordLength; //字长
uint16_t USART_StopBits; //停止位
uint16_t USART_Parity; //奇偶校验位
uint16_t USART_Mode; // 收发数据使能或失能
uint16_t USART_HardwareFlowControl; //硬件控制流
} USART_InitTypeDef;
其实在学习32的时候,一般如果要用到32的内设或者外设,都要进行相应的初始化,也就是相应的结构体成员进行配置,而我们本次要实现的printf重定向,也
就用到了串口,所以也要对串口进行初始化!而我是用的USART2,所以要对其进行相应的配置。
查看STM32硬件原理图:
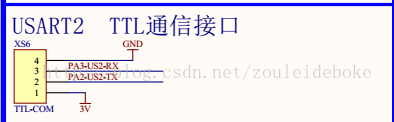
由原理图可知,这个串口是支持TTL电平的,接收数据RX是接在PA3管脚上的,发送数据是接在PA2上的。由于我是要输出到PC上的串口终端,所以PA2要
设为复用推挽输出模式,PA3设为复用开漏输入模式。
查看stm32f10x_it.c这个代码可知USART2是挂接在APB1总线上的,GPIO是挂在APB2总线上的,如下所示:
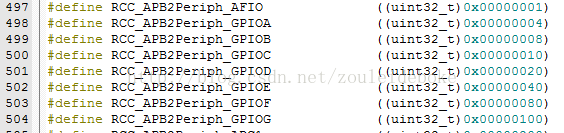

所以我们在进行时钟初始化的时候要特别注意。
2.printf重定向
其实printf重定向就是我们将printf重新定向到串口,也就是我们可以自己重写C的库函数,当连接器检查到用户编写了与C库函数相同的名字,优先采用
用户编写的函数这样用户就可以实现对库的修改了。
printf函数实际是一个宏,最终调用的是 fputc(int ch,FILE *f)这个函数,所以我们需要修改这个函数。
下面我们着重分析一下fputc函数:
这个库函数调用了两个ST库函数,分别是:USART_GetFlagStatus()与USART_SendData(),形参ch表示串口将要发送的数据,也就是说。当使用printf()时,它先调用fpuc()函数,然后使用ST库的串口发送函数USART_SendData(),把数据转移到发送数据寄存器TDR.触发我们的串口向PC发送一个相应的数据,调用完USART_SendData()之后,
使用 while(USART_GetFlagStatus(USART2,USART_FLAG_TC) != SET)语句不停的检查串口的数据是否发送完成的标志位TC,一直检查到标志为“完成”,才进行下一步操作,
要注意的是USART_SendData()每次只发送一个字节的数据!
注意:由于fputc()函数的形参调用了C库的FILE,所以在程序中加入stdio.h这个头文件,便且在keil的编译器的设置中勾选Use MicroLIB(使用微库)
3.硬件连接
首先硬件上我们将USB转串口线的TXD,RXD,GND,分别接在32开发板USART2上的RXD,TXD,GND。
由于USART2是TTL电平,所以我们用的usb转串口线一定要是支持TTL电平的,否则串口通信不上!
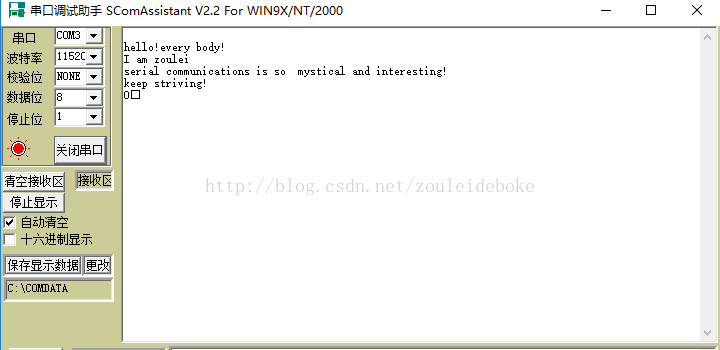
4.效果图
串口调试助手显示: